J, Ifo ((
3 . 159
Изобретение относится к электротехнике и может быть использовано в электроприводе с машиной двойного питания, например, для мельнид- вентиляторов.
Целью изобретения является повышение энергетических показателей электропривода путем снижения потерь энергии на активных сопротивлениях маши- ны и в цепях питания при точной установке разности (Ьаз векторов токов ротора и статора.
На фиг.. 1 представлена функциональная схема устройства для управ- ,ления машиной двойного питания на :фит. 2 - схема Формирователя сигналов управления генератором нафиг.З- схема Фop шpoвaтeля опорных сигна- .лов; на фиг. 4 - схема формирователя сигналов обратной связи; на фиг.5 - схема преобразовател:я координат.
Устройство для управления маши- .ной двойного питания, содержит источник 1 регулируемого тока (фигЛ), выходы которого предназначены для подключения к обмоткам ротора машины 2 двойного питания, датчики фазных токов 3 и напряжений 4,, предназначенные для установки в цепях питания обмоток статора от питающей сети.5, измерительный блок 6 с выходами составляющих тока статора и амплитуды напряжения, подкл(пченными к соответствующим входам формирователя 7 сигналов обратной связи, и входами,, подключенными к выходам датчиков Фазных токов 3 и напряжений 4, управляем1-,Й генератор 8 опорных синусоидальных .напряженлй 8 с входами 9-11.управления фазы, частоты и амплитуды соответственно. Формирователь 12 опорных сигналов с тремя входами 13-15, первый из которых предназначен щш подключения сигнала задания частоты скольжения, второй соединен с выходом ам1литуды напряжения измерительного блока 6, а третий вход предназначен для подключения сигнала частоты тока ротора, и формирователь 16 сигналов управления генератором с двумя парами входов и выходом управления фазы, подключенным к входу 9 генератора 8, выходы которого подключены к соответствующим управляющим входам источника 1 регулируемого ток При этом первая к вторая пары входов формирователя 16 сигналов управления генератором подклнгчены соответственн
0
5
0
5
0
5
0
5
i. . 4
к выходам формирователя 12 опорных сигналов и к выходам Формирователя 7 сигналов обратной связи.
Формирователь 16 сигналов управления генератором ; дополнительно . снабжен выходами управления частотой и амплитудой, соединенными с входами 10 и 11 генератора 8. Выход управления частотой указанного Формирователя 16 соединен, кроме того, с входом 15 Формирователя 12 опорных сигналов.
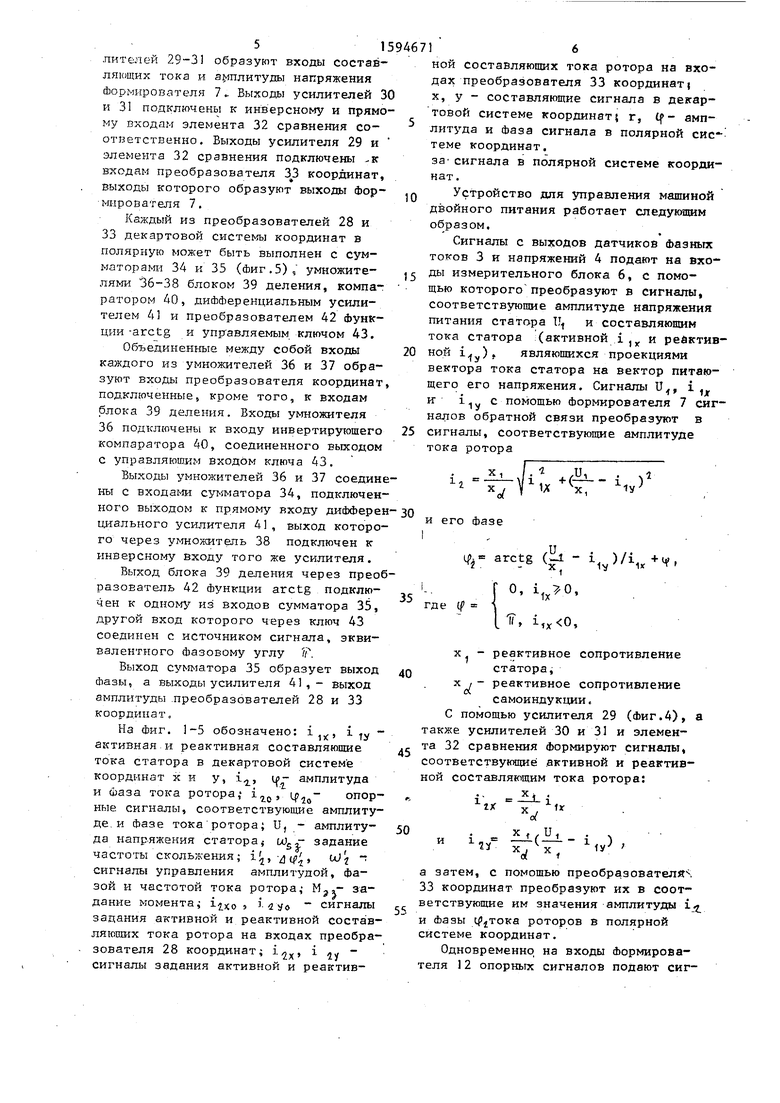
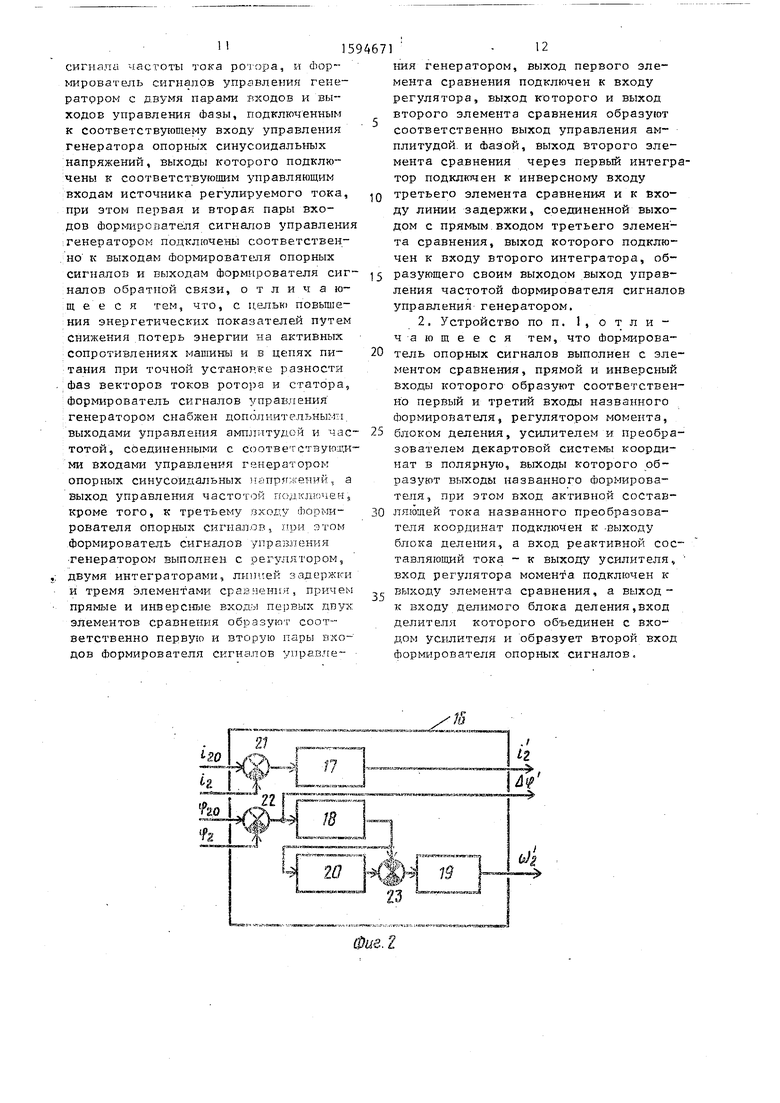
Формирователь 16 сигналов управления генератором выполнен с регулятором 17 (фиг.2)5 двумя интеграторами 18 и 19, линией 20 задержки и тремя элементами 21-23 сравнения. Прямые и инверсные входы элементов 21 и 22 сравнения образуют соответственно первую и вторую пару входов Формирователя 16. Выход элемента 21 сравнения подключен к входу регулятора 17, выход которого и выход элемента сравнения 22 образуют соответственно выход управления амплитудой и Фазой.-Выход элемента 22 сравнения через интегратор 18 подключен к инв ерсному входу элемента 23 сравнения и входу линии, 20 задержки, соединенной выходом с прямым входом элемента 23 сравнения, выход которого подключен к входу интегратора 19, образующего своим выходом выход управления частотой Формирователя 16.
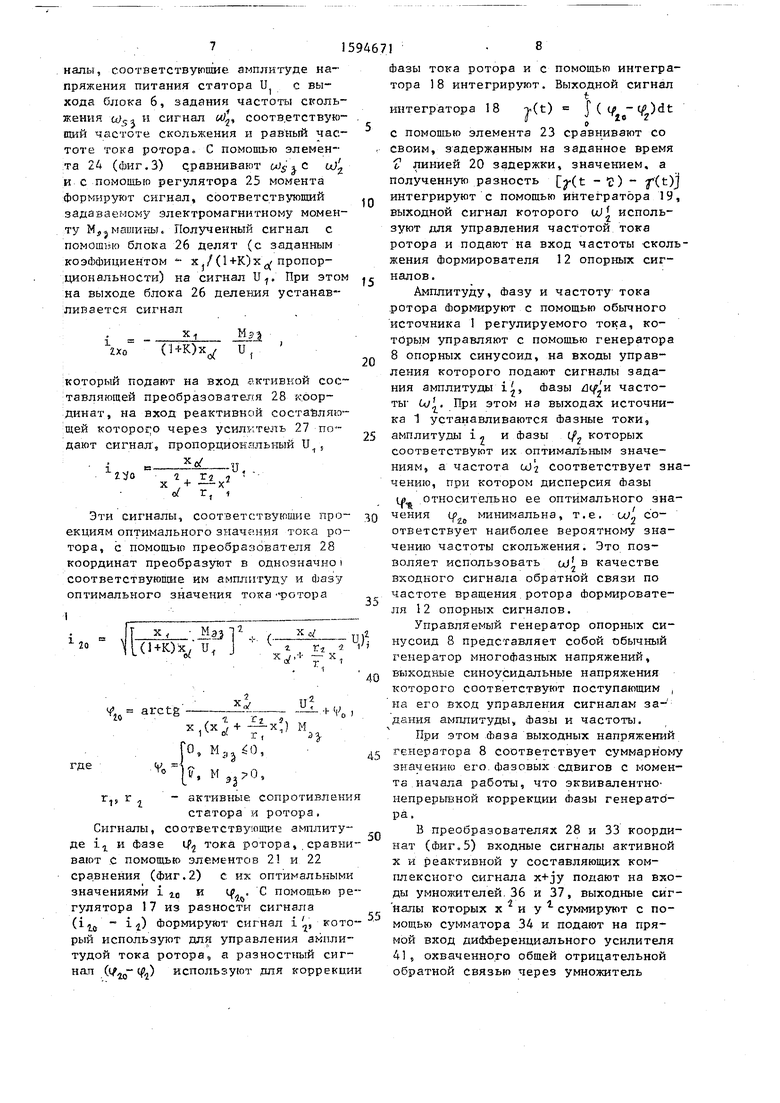
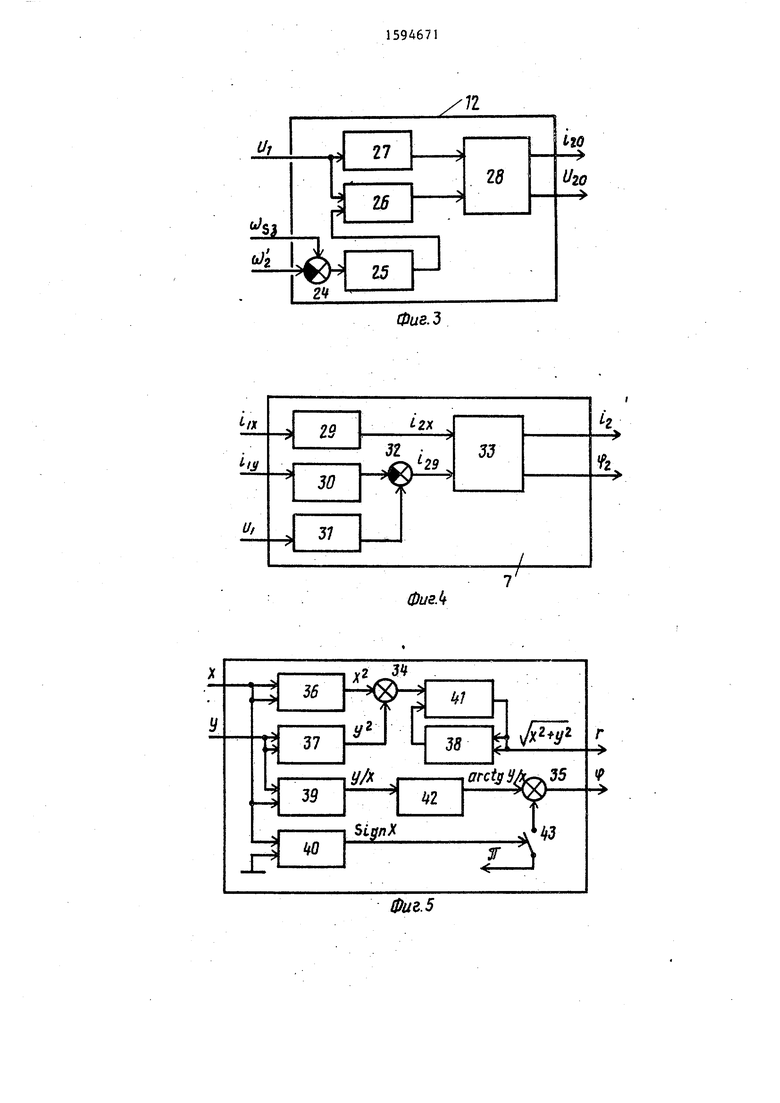
Формирователь опорных сигналов 12 выполнен с элементом 24 сравнения .(Фиг.З), прямой и инверсный входы которого образуют соответственно входы 13 и 15 регулятором 25 момента, блоком 26 деления, усилителем 27 и преобразователем 28 декартовой системы координат в полярную, выходы которого образуют выходы фop Jиpoвaтeля 1.2. Вход активной составляющей тока преобразователя 28 подключен к выходу блока 26 деления, а выход реактивной составляющей тока - к выходу усилителя 27. Вход регулятора 25 момента подключен к выходу элемента 24 сравнения, а выход - к. входу делимого блока 26 деления, вход делителя которого объединен с входом усилителя 27 и образует вход 14 формирова- . теля 12.
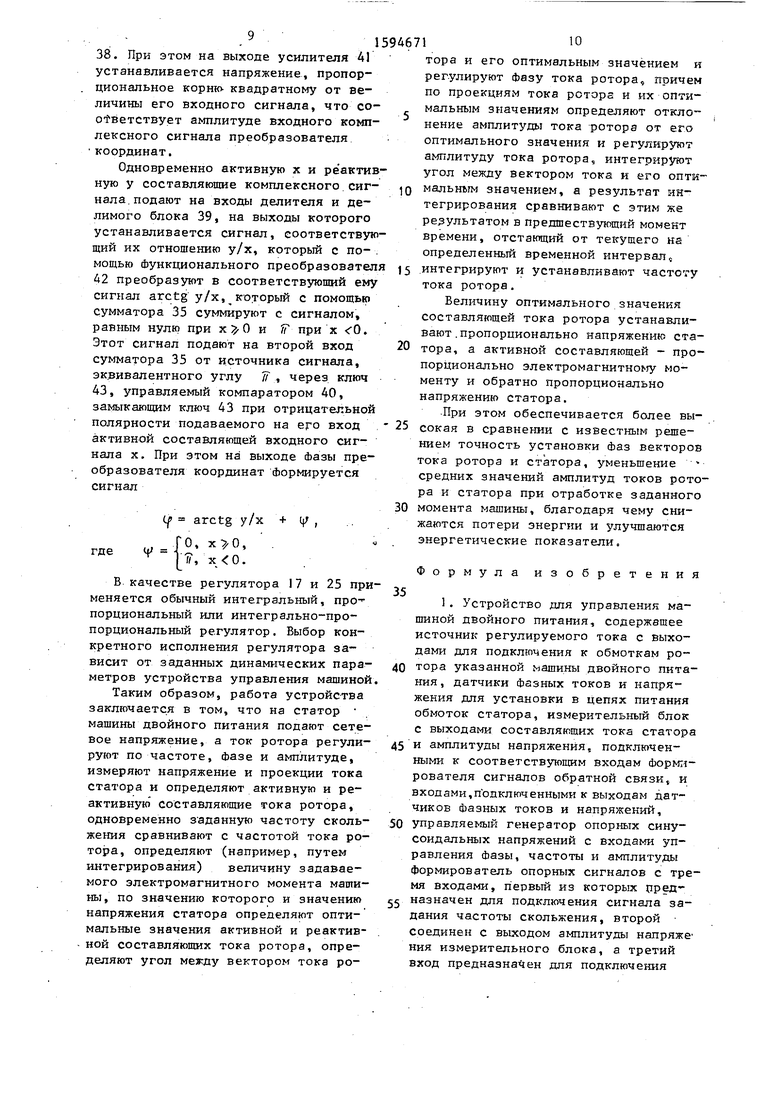
Формирователь 7 сигналов обратной связи выполнен с усилителями 29-31 (Фиг.4), элементом 32 сравнения и преобразователем 33 декартовой системы координат в полярную. Входы уси
лителей 29-31 образуют входы составляющих тока и а далитуды напряжения Формирователя 7 Выходы усилителей и 31 подключены к инверсному и прямму входам элемента 32 сравнения соответственно. Выходы усилителя 29 и элемента 32 сравнения подключены к входам преобразователя координат выходы которого образуют выходы формирователя 7.
Каждый из преобразователей 28 и 33 декартовой системы координат в полярную может быть выполнен с сумматорами 34 и 35 (Фиг.5), умножителями 36-38 блоком 39 деления, компаратором 40, дифференциальным усилителем 41 и преобразователем 42 функции -arctg и упр-авляемым. ключом 43.
Объединенные между собой входы каждого из умножителей 36 и 37 образуют входы преобразователя координат подключенные5 кроме того, к входам блока 39 деления. Входы умножителя 36 подключены к входу инвертирующего компаратора 40, соединенного выходом с управляющим входом ключа 43.
Выходы умножителей 36 и 37 соединны с входаг ш сут-5матора 34, подключенного выходом к прямому входу диФФере циального усилителя 41, выход которого через умножитель 38 подключен к инверсному входу того же усилителя.
Выход блока 39 деления через преоразователь 42 функции arctg подключен к одному из входов сумматора 35, другой вход которого через ключ 43 соединен с источником сигнала, эквивалентного фазовому углу /Л
Выход cyNiMaTopa 35 образует выход Фазы, а выходы усилителя 41 , - выход амплитуды преобразователей 28 и 33 координат.
На фиг. 1-5 обозначено: i, i у - активная и реактивная составляющие тока статора в декартовой системе координат X и у, 1, амплитуда и Фаза тока ротора,- i,, (- опорные сигналы, соответствующие амплитуде, и фазе тока ротора; U, - амплитуда напряжения статора uJgW- задание частоты скольлсения; i/j,(, uJ сигналы управления амплитудой, фазой и частотой тока ротора,- М,,- задание момента iixo 9 сигналы задания активной и реактивной соста в- ляюшнх тока ротора на входах преобразователя 28 координат; i, i сигналы задания активной и реактив
1594671
0
5
ной составляющих тока ротора на входах преобразователя 33 координат X, у - составляющие сигнала в декартовой системе координат; г, q - амплитуда и Фаза сигнала в полярной сие- теме координат.
за сигнала в полярной системе координат.
Устройство для управления машиной двойного питания работает следующим образом.
Сигналы с выходов датчиков Фазных токов 3 и напряжений 4 подают на вхо5 ды измерительного блока 6, с помощью которого преобразуют в сигналы, соответствующие амплитуде напряжения питания статора 11 и составляющим тока статора (активной i , и рейктив0 ной i,,), являющихся проекциями
вектора тока статора на вектор питающего его напряжения. Сигналы U, i , и i с помощью Формирователя 7 сигналов обратной связи преобразуют в сигналы, соответствующие амплитуде тока ротора
f
arctg (.-1
X .
где (f
О,
чх
0,
0
X . X / 5
реактивное сопротивление статораi с / реактивное сопротивление
самоиндукции,
С помощью усилителя 29 (Фиг.4), а также усилителей 30 и 31 и элемента 32 сравнения Формируют сигналы, соответствукшдаё активной и реактивной составляющим тока ротора:
X
0
и
1У
Л(.
X
iiy)
5
d -i
а затем, с помощью преобразователйч 33 координат преобразуют их в соответствующие им значения амплитуды i и Фазы y jTOKa роторов в полярной системе координат.
Одновременно, на входы Формирователя 12 опорных сигналов подают сигналы, соответствуюгсше амплитуде напряжения питания статора U с выфазы тока ротора и с помощью интегратора 18 интегрируют. Выходной сигнал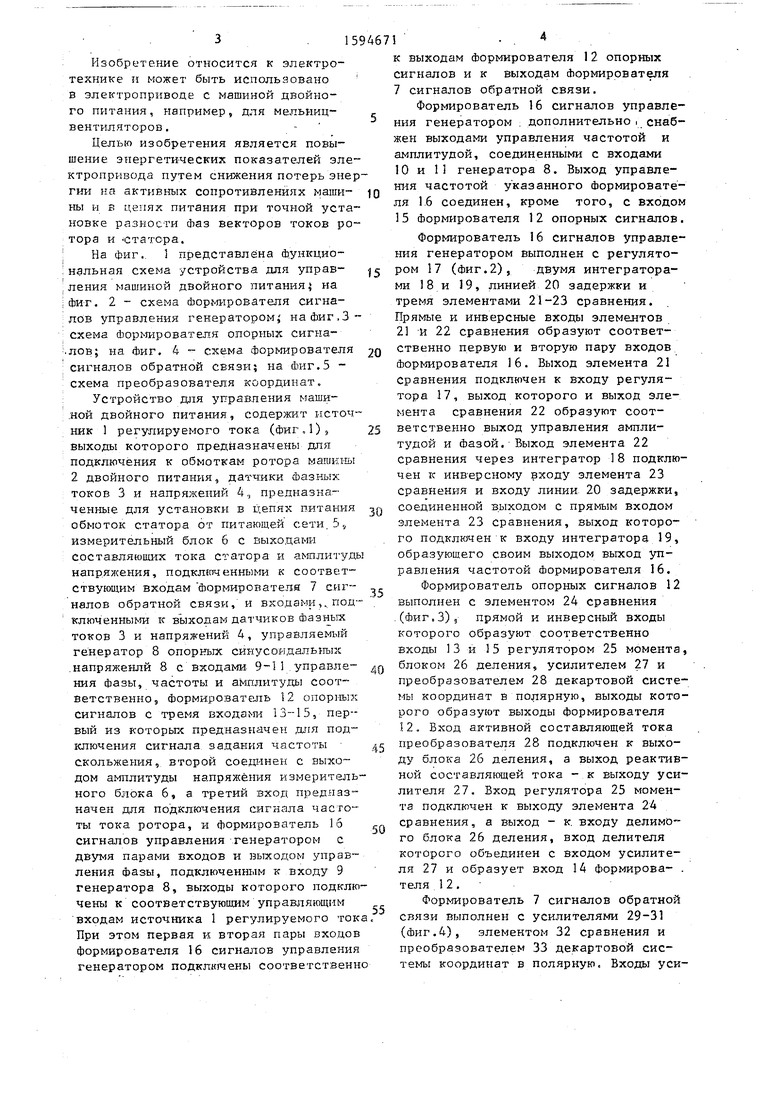
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводе с машиной двойного питания, например для мельниц-вентиляторов. Целью изобретения является повышение энергетических показателей электропривода путем снижения потерь энергии на активных сопротивлениях машины и в цепях питания при точной установке фаз векторов токов ротора и статора. Цель достигается тем, что в устройстве, содержащем источник регулируемого тока 1, выходы которого предназначены для подключения к обмоткам ротора машины двойного питания 2, датчик фазных токов 3 и датчик фазных напряжений 4, предназначенные для установки в цепях питания обмоток статора от питающей сети 5, измерительный блок 6, формирователь сигналов обратной связи 7, и генератор опорных синусоидальных напряжений 8, формирователь 16 сигналов управления указанным генератором выполнен с дополнительными выходами управления частотой и амплитудой. Благодаря этому обеспечивается более высокая в сравнении с известным решением точность установки фаз векторов пучка ротора и статора, уменьшение средних значений амплитуд токов ротора и статора и снижение потерь. 5 ил.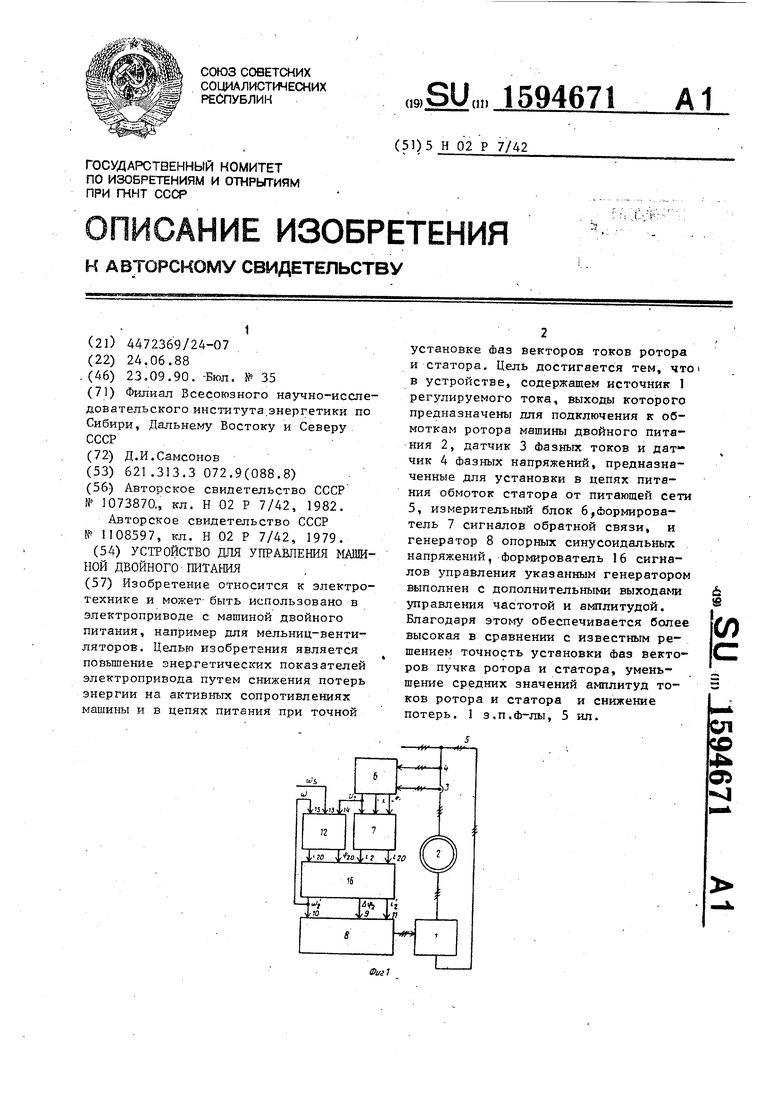
хода блока б, задания частоты скольжения и сигнал и), соотв.етствую- пщй частоте скольжения и равный частоте тока ротора. С помощью элемента 24 (фиг.З) сравнивают (xJ j. с oJ и с помоишш регулятора 25 момента формируют сигнал, соответствующий задаваемому электромагнитному моменту M,jмашины. Г1олу11енный сигнал с помощью блока 26 делят (с заданшм коэффициентом x,/(l+K)Xj, пропорциональности) на сигнал II . При этом на выходе блока 26 деления устанавливается сигнал
1 - ixo
(РгК)х и,
который подают на вход активной сос тавляющей преобразователя 28 координат, на вход реактивной составляющей KOTOpoi;o через усилитель 27 подают сигнал , пропорциональный U ,
Хо/
1 вм ЛА
2 , г 2 2 X + Х
и, ,,
Эти сигналы, соответствующие проекциям оптимального значения тока ротора, с помощью преобразователя 28 координат преобразуют в однозначно t соответствующие им амплитуду и фазу оптимального значения тех а «р о тор а
Ю
V arctg
х5
и
Го
) М
г, 5
+ V.
де
V 1
TO 1
. M., V, М 33 70,
г,, г J
- активные, сопротивления
статора и ротора. Сигналы, соответствующие a mлитy- де i и ф-азе if тока ротора, сравни30
вают с помощью элементов 2 и 22 сравнения (фиг.2) с их оптимальными значениями i щ и ц . С помощью регулятора 17 из разности сигнала
(i 1 формируют сигнал i , кото- мощью сумматора 34 и подают на пря- рый используют для управления амплитудой тока ротора, а разностный сиг- нап (i/.jo (2 используют для коррекции
При этом .фаза выходных напряжени генератора 8 соответствует суммарно значению его.фазовых сдвигов с моме та, начала работы, что эквивалентно- непрерывной коррекции Фазы генератб ра.
В преобразователях 28 и 33 коорди нат (Фиг.5) входные сигналы активной X и реактивной у составляющих комплексного сигнала x+jy подают на вх ды умножителей. 36 и 37, выходные си йалы которых X и у суммируют с по
мой вход дифференциального усилителя 41, охваченного общей отрицательной обратной связью через умножитель
0
0
25
30
35
интегратора 18
/t) I ( - C4)dt
о с ПОМОЩЬЮ элемента 23 сравнивают со
своим, задержанным на заданное время t линией 20 задержки, значением, а полученную разность Cy(t - С) - y(t)j интегрируют с помощью интегратора 19, выходной сигнал которого uJ используют для управления частотой тока ротора и подают на вход частоты скольжения формирователя 12 опорных сигналов.
Амплитуду, Фазу и частоту тока .ротора Формируют с помощью обычного источника 1 регулируемого тока, которым управляют с помощью генератора 8 опорных синусоид, на входы управления которого подают сигналы задания амплитуды i. Фазы uiflu часто40
ТЫ (лУ ,
45
30
мощью сумматора 34 и подают на пря-
При этом на выходах источника 1 устанавливаются фазные токи, амплитудь i я и фазы с/- которых соответствуют их оптимальным значениям, а частота uj i соответствует значению, при котором дисперсия Фазы (а .относительно ее оптимального значения (f минимальна, т.е. u)L соответствует наиболее вероятному значению частоты скольжения. Это позволяет использовать и)1 в качестве входного сигнала обратной связи по частоте вращения ротора Формирователя 12 опорных сигналов.
Управляемый генератор опорных синусоид 8 представляет собой обычный генератор многофазных напряжений, выходные синоусидальные напряжения которого соответствуют поступающим , на его вход управления сигналам за- Дания амплитуды, фазы и частоты.
При этом .фаза выходных напряжений генератора 8 соответствует суммарному значению его.фазовых сдвигов с момента, начала работы, что эквивалентно- непрерывной коррекции Фазы генератб- ра.
В преобразователях 28 и 33 координат (Фиг.5) входные сигналы активной X и реактивной у составляющих комплексного сигнала x+jy подают на входы умножителей. 36 и 37, выходные сиг- йалы которых X и у суммируют с помощью сумматора 34 и подают на пря-
мой вход дифференциального усилителя 41, охваченного общей отрицательной обратной связью через умножитель
Одновременно активную х и ре актив ную у составляющие комплексного сигнал а. подают на входы делителя и делимого блока 39, на выходы которого устанавливается сигнал, соответствующий их отношению у/х, который с по- . мощью Функционального преобразовател 42 преобразуют в соответствующий ему сигнал arctg у/х,который с помощью сумматора 35 суммируют с сигналом, равным нулю при и Г при х 0. Этот сигнал подают на второй вход сумматора 35 от источника сигнала, эквивалентного углу , через ключ 43, управляемый компаратором 40, замыкающим ключ 43 при отрицательной полярности подаваемого на его вход активной составляющей входного сигнала X. При этом на выходе Фазы преобразователя координат формируется сигнал
1
V
Lf arctg у/х +
Го, , . , X 0.
V
В качестве регулятора 17 и 25 прменяется обычный интегральный, про- порционапьный или интегрально-пропорциональный регулятор. Выбор конкретного исполнения регулятора зависит от заданных динамических параметров устройства управления машиной
Таким образом, работа устройства заключается в том, что на статор мащины двойного питания подают сетевое напряжение, а ток ротора регулируют по частоте. Фазе и амплитуде, измеряют напряжение и проекции тока статора и определяют активную и реактивную составляющие тока ротора, одновременно заданную частоту скольжения сравнивают с частотой тока ро- Tojpa, определяют (например, путем интегрирования) величину задаваемого электромагнитного момента машины, по значению которого и значению напряжения статора определяют оптимальные значения активной и реактивной составляющих тока ротора, определяют угол между вектором тока ро1594671
10
тора и его оптимальным значением и регулируют Фазу тока ротора, причем по проекциям тока ротора и их оптиJ мальным значениям определяют отклонение амплитуды тока ротора от его оптимального значения и регулируют амплитуду тока ротора, интегрируют угол между вектором тока и его опти0 мальньтм значением, а результат интегрирования сравнивают с этим же результатом в предшествующий момент времени, отстающий от текущего на определенный временной интервал,
5 интегрируют и устанавливают частоту тока ротора.
Величину оптимального значения составляющей тока ротора устанавливают .пропорционально напряжению статора, а активной составляющей - пропорционально электромагнитному моменту и обратно пропорционально напряжению статора.
При этом обеспечивается более вы5 сокая в сравнении с известным решением точность установки Фаз векторов тока ротора и статора, уменьщение средних значений амплитуд токов ротора и статора при отработке заданного
0 момента машины, благодаря чему снижаются потери энергии и улучшаются энергетические показатели.
Формула изобретения
0
1115
сигнала частоты тока ротора, и diop- мирователь сигналов управления генератором с двумя парами входов и выходов управления фазы, подключенным к соответствующему входу управления генератора опорных синусоидальных напряжений, выходы которого подключены к соответствуюымм управляющим входам источника регулируемого тока, при этом первая и вторая пары входов формирогшт(шя сигналов управления :генератором подключены соответствен- . но к выходам Формирователя опорных сигналов и выходам формирователя сигналов обратной связи, о т л и ч а ю- щ ее с я тем, что, с целью повышения энергетических показателей путем снижения потерь энергии на активных сопротивлениях машины и в цепях питания при точной установке разности фаз векторов токов ротора и статора, формирователь сигналов управления генератором снабжен дополиительнымн выходами управления амплитудой и. частотой, соединенными с соответстзую:ди ми входами управления генератором опорных синусоидальных гг прямсений, а выход управления частотой подключен, кроме того, к третьему входу Зюрыи- рователя опорных сигиал.ов, при этом формирователь сигналов управления генератором выполнен, с регулятором, двумя интеграторами, линией задержки и тремя элементами сравнения, причем пряг зые и инверсные входы первых двух элементов сравнения образуют соответственно первую и вторую пары входов формирователя сигналов управде
7
5
0
.5
1 - 12
ния генератором, выход первого элемента сравнения подключен к входу регулятора, выход которого и выход второго элемента сравнения образуют соответственно выход управления амплитудой, и Фазой, выход второго элемента сравнения через первый интегратор подклктчен к инверсному входу третьего элемента сравнения и к входу линии задержки, соединенной выходом с прямым входом третьего элемента сравнения, выход которого подключен к входу второго интегратора, образующего своим выходом выход управления частотой Формирователя сигналов управления генератором.
2, Устройство по п. 1, о т л и - чающее ся тем, что Формирователь опорных сигналов выполнен с элементом сравнения, прямой и инверсный входы которого образуют соответственно первый и третий входы названного Формирователя, регулятором момента, блоком деления, усилителем и преобразователем декартовой системы координат в полярную, выходы которого образуют выходы названного Формирова- те.ая, при этом вход активной состав- л.яющей тока названного преобразователя координат подключен к -выходу блока деле1- ия, а вход реактивной сос- тавляюцщй тока - к выходу усилителя, вход регулятора момента подключен к выходу элемента сравнения, а выход- к входу делимого блока деления,вход делителя которого объединен с входом усилителя и образует второй вход формирователя опорных сигналов.
фые. 2
Фиг.Ъ
| Способ управления электродвигателем двойного питания | 1982 |
|
SU1073870A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
