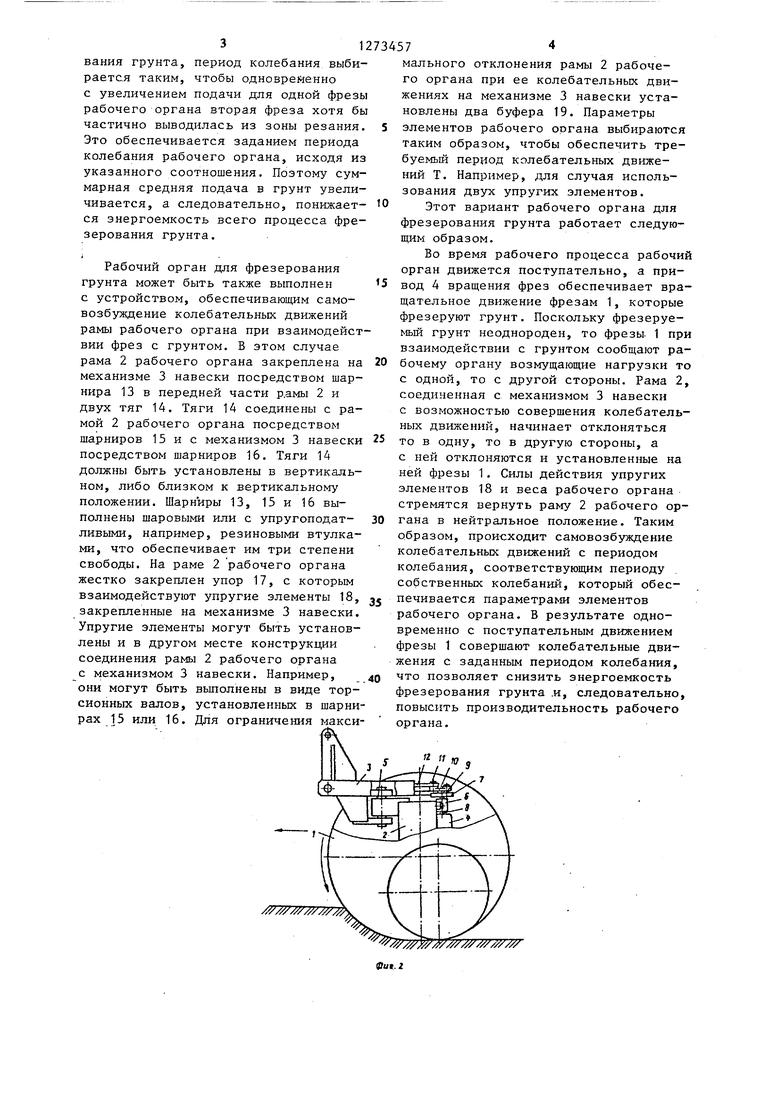
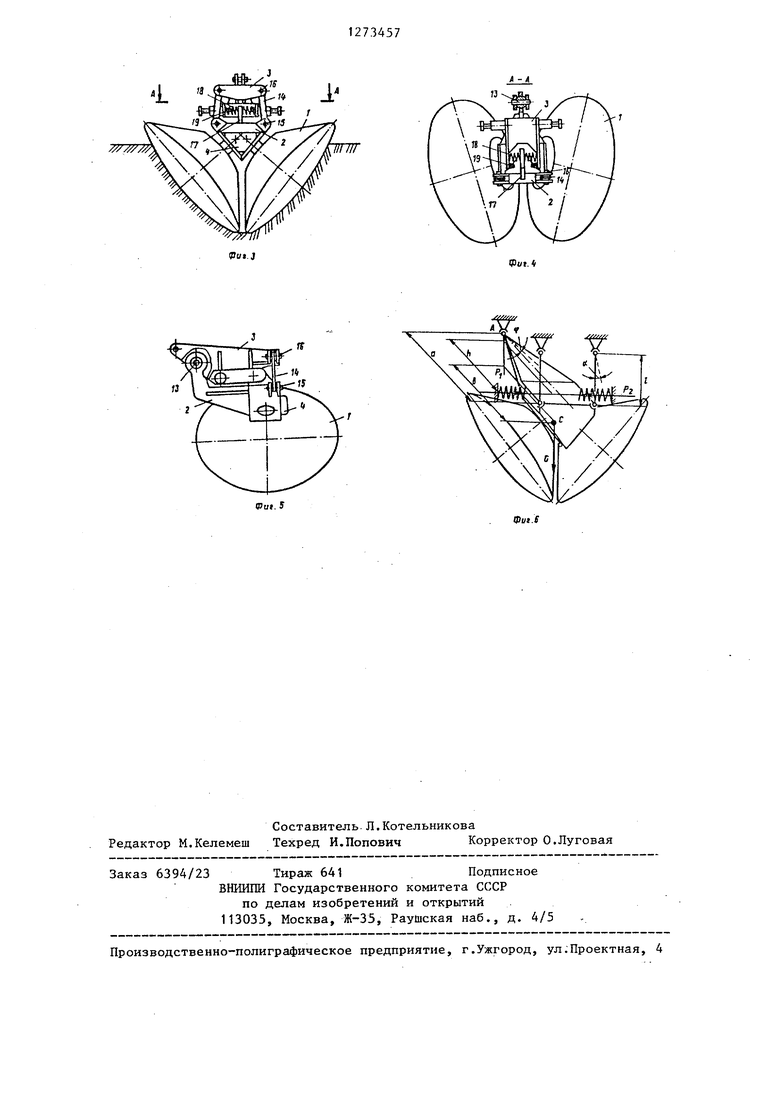
12 Изобретение относится к землеройной технике, а именно к рабочим органам, предназначенным для строительства мелиоративных каналов или обработки почвы сплошным фрезерованием. Целью изобретения является повышение производительности и снижение энергоемкости процесса фрезерования. На фиг. 1 изображен рабочий орган для фрезерования грунта, предназначанный для обработки почвы сплошным фрезерованием, вид сзади; на фиг. 2 то же, вид сбоку; на фиг. 3 - рабочий орган для фрезерования грунта с устройством самовозбуждения колеба тельных движений, предназначенньш дл строительства мелиоративных каналов, вид сзади; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - рабочий орган для строительства каналов, вид сбоку на фиг. 6 - схема соединения рамы рабочего органа с кронштейном для навески. Рабочий орган каналокопателя включает две симметрично расположенные фрезы 1, раму 2 рабочего органа, механизм 3 навески и привод 4 вращения фрез. Фрезы 1 установлены на раме 2 рабочего органа таким образом, что плоскости их вращения образуют угол с направлением движения рабочего органа, т.е. фрезы 1 развернуты в плане. Оси вращения фрез t могут быть установлены наклонно к горизонтальной плоскости или параллельно ей Рама 2 рабочего органа закреплена на механизме 3 навески посредством горизонтального шарнира 5. На раме 2 рабочего органа посредством подшипни ка 6 установлен механизм колебательного движения, выполненный из кривошипа 7, который с помощью вала 8 кинематически связан с приводом 4 вращения фрез. На оси 9 кривошипа 7 шарнирно установлен 10, которьй своим вторым концом посредством шарнира 11 соединен с проушинами 12, жестко закрепленными на механизме 3 навески. Кинематическая связь кривоишпа 7 с приводом 4 вращения фрез осуществляется зубчатыми, цепными или ременными передачами и обеспечивает вращение кривошипа 7 с частотой , где период колебаний Т определяется исходя из соотношения B.sincf где 7 3,14...; 7 Б - ширина захвата фрезерования (ширина обрабатываемой сплошньм фрезерованием полосы или ширина отрываемого канала по верху); Ср - угол максимального отклонения колебательных движений рабочего органа от нейтрального положения; V - скорость поступательного движения рабочего органа; Т - период колебания, который обеспечивается приводом колебательных движений; Т - критический период колебания (минимальная для данной конструкции величина периода колебаний, при котором еще не происходит поломок конструкции в результате резонанса, определяемая исходя , из конструктивных параметров рабочего органа и его элементов. Величина угла ср определяется расстоянием от оси шарнира 5 до оси вала 8 и размером кривошипа 7, при этом угол ( должен быть меньше угла в горизонтальной плоскости между плоскостью вращения фрезы и направлением движения рабочего органа, что позволяет исключить непроизводительное трение задней части фрез о грунт. Рабочий орган работает следующим образом. Во время рабочего процесса рабочий орган движется поступательно, а привод. 4 вращения фрез обеспечивает вращательное движение фрезам 1 и посредством кинематической связи кривошипу 7. Шатун 10 соединяет ось 9 кривошипа и проушины 12, жестко закрепленные на механизме 3 навески и тем самым обеспечивает при вращении кривошипа 7 колебательные движения рамы 2 относительно шарнира 5. Фрезы 1 установлены на раме 2 и поэтому одновременно с поступательным движением вместе с рабочим органом совершают колебательные движения в горизонтальной плоскости вместе с рамой 2. Скорость подачи фрез в грунт складывается из скоростей поступательного и колебательного движений. Для обеспечения разра.б.отки грунта с увеличенной подачей фрез, что позволяет снизить энергоемкость фрезерования грунта, период колебания выбирается таким, чтобы одноврейенно с увеличением подачи для одной фрезы рабочего органа вторая фреза хотя бы частично выводилась из зоны резания Это обеспечивается заданием периода колебания рабочего органа, исходя из указанного соотношения. Поэтому суммарная средняя подача в грунт увеличивается, а следовательно, понижается энергоемкость всего процесса фрезерования грунта. Рабочий орган для фрезерования грунта может быть также выполнен с устройством, обеспечивающим самовозбуждение колебательных движений рамы рабочего органа при взаимодейст вии фрез с грунтом. В этом случае рама 2 рабочего органа закреплена на механизме 3 навески посредством шарнира 13 в передней части р.амы 2 и двух тяг 14. Тяги 14 соединены с рамой 2 рабочего органа посредством шарниров 15 и с механизмом 3 навески посредством шарниров 16. Тяги 14 должны быть установлены в вертикальном, либо близком к вертикальному положении. Шарниры 13, 15 и 16 выполнены шаровыми или с упругоподатливыми, например, резиновыми втулками, что обеспечивает им три степени свободы. На раме 2 рабочего органа жестко закреплен упор 17, с которым взаимодействуют упругие элементы 18, закрепленные на механизме 3 навески. Упругие элементы могут быть установлены и в другом месте конструкции соединения рамы 2 рабочего органа с механизмом 3 навески. Например, они могут быть вьшолнены в виде торсионных валов, установленных в шарни рах 15 или 16. Для ограничения макси мального отклонения рамы 2 рабочего органа при ее колебательных движениях на механизме 3 навески установлены два буфера 19. Параметры элементов рабочего органа выбираются таким образом, чтобы обеспечить требуемый период колебательных движений Т. Например, для случая использования двух упругих элементов. Этот вариант рабочего органа для фрезерования грунта работает следуюш;им образом. Во время рабочего процесса рабочий орган движется поступательно, а привод 4 вращения фрез обеспечивает вращательное движение фрезам 1, которые фрезеруют грунт. Поскольку фрезеруемый грунт неоднороден, то фрезы. 1 при взаимодействии с грунтом сообщают рабочему органу возмущающие нагрузки то с одной, то с другой стороны. Рама 2, соединенная с механизмом 3 навески с возможностью совершения колебательных движений, начинает отклоняться то в одну, то в другую стороны, а с ней отклоняются и установленные на ней фрезы 1. Силы действия упругих элементов 18 и веса рабочего органа стремятся вернуть раму 2 рабочего органа в нейтральное положение. Таким образом, происходит самовозбуждение колебательных движений с периодом колебания, соответствующим периоду собственных колебаний, который обеспечивается параметрами элементов рабочего органа. В результате одновременно с поступательным движением фрезы 1 совершают колебательные движения с заданньш периодом колебания, что позволяет снизить энергоемкость фрезерования грунта .и, следовательно, повысить производительность рабочего органа.
л// ////f///7////////////
tlut.Z
,,
L
A - Л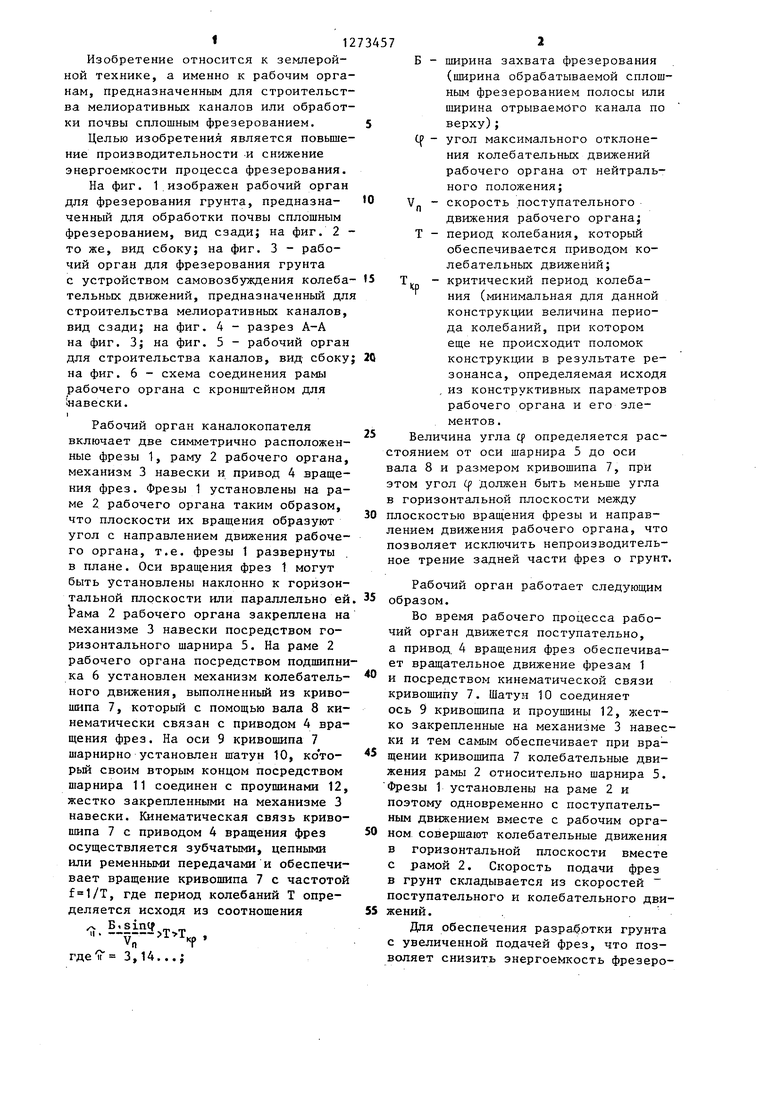
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган каналокопателя | 1987 |
|
SU1532670A1 |
| Фреза каналокопателя | 1982 |
|
SU1082908A1 |
| ТРАНШЕЕКОПАТЕЛЬ | 2008 |
|
RU2395644C2 |
| Рабочий орган землеройно-метательной машины | 1976 |
|
SU910949A1 |
| Рабочий орган землеройной машины | 1983 |
|
SU1105570A1 |
| Рабочий орган землеройной машины | 1989 |
|
SU1677189A1 |
| Рабочий орган каналокопателя | 1977 |
|
SU812888A1 |
| СПОСОБ ДОБЫЧИ КОРНЕЙ И КОРНЕВИЩ СОЛОДКИ, УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ НЕТОВАРНЫХ ЧАСТЕЙ КОРНЕЙ СОЛОДКИ, МАШИНА ДЛЯ ДОБЫЧИ КОРНЕЙ СОЛОДКИ, МАШИНА ДЛЯ УБОРКИ КОРНЕЙ РАСТЕНИЙ | 2000 |
|
RU2179384C1 |
| Каналокопатель | 1988 |
|
SU1585467A1 |
| Рабочий орган рыхлителя | 1989 |
|
SU1670050A2 |
1. РАБОЧИЙ ОРГАН КАНАЛОКОПАТЕЛЯ, включающий раму с установленными на ней приводными фрезами, расположенными под углом к продольной оси рабочего органа, и механизм навески, отличающийся тем, что, с целью повышения производительности и снижения энергоемкости процесса фрезерования, рама рабочего органа снабжена механизмом колебательных движений в горизонтальной плоскости и связана с механизмом навески. 2.Рабочий орган по п. 1, о т л ичающийся тем, что механизм колебательных движений выполнен из кривошипа с осью и связанного с ним шатуна, свободный конец которого шарнирно связан с механизмом навески, а привод фрез кинематически связан с кривошипом. 3.Рабочий орган по п. 1, отлиi чающийся тем, что связь рамы рабочего органа с механизмом навески (Л выполнена из шарнира и двух шарнирных тяг и снабжена упругими элементами. 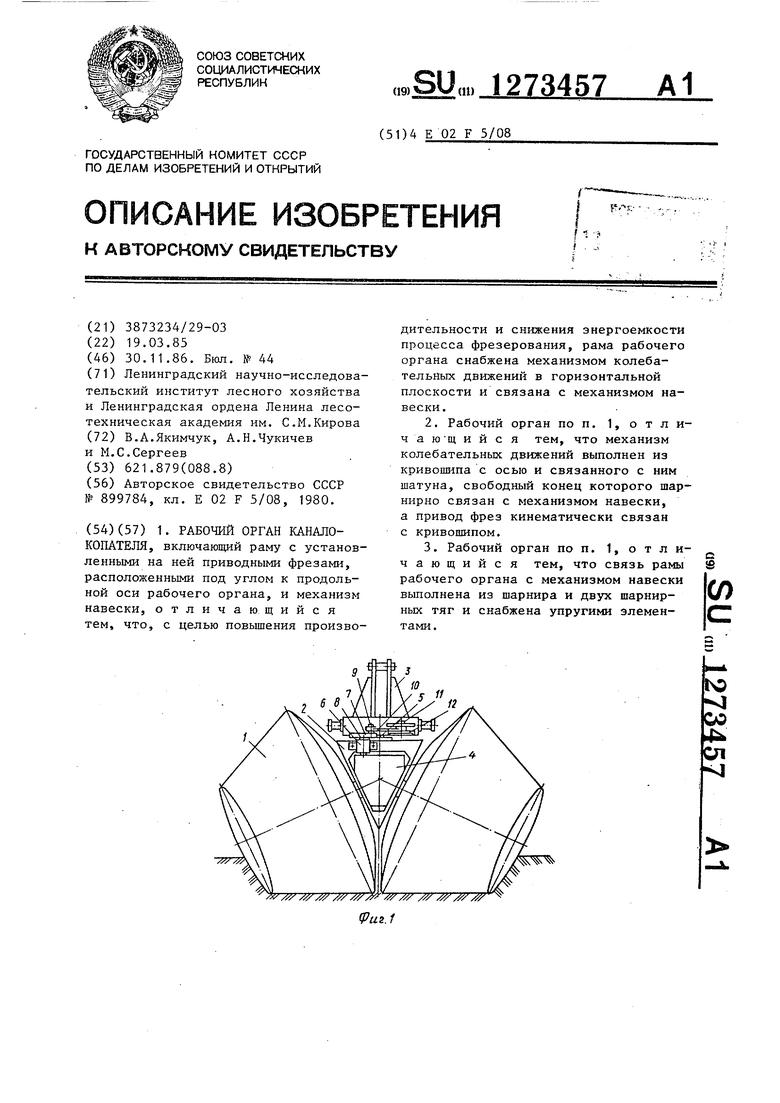
ff
iPut. 5
| Рабочий орган каналокопателя | 1980 |
|
SU899784A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
