вод 2 режущего органа. Через преобразователь 8 сигнала и блокировочное реле 9 подается сигнал величины СП на регулирующий исполнительный орган 4, Включаясь, он подает сжатый воздух на вход воздухораспределителя (ВР) 5 направления подачи. Сигнал на выходе датчика 10 нагрузки (Н) в начальный момент минимален. На выходе пневматического усилителя 11 сигнал максимален и определяется уровнем сигнала с задатчика 12 коррекции сигнала Н и передаточным коэффициентом дроссельного сумматора 14, Сигнал с выхода усилителя 11 сравнивается с сигналом с задатчика 15 установки Н, На выходе элемента 13 сравнения давление будет равно нулю и ключевой управлянщий элемент 7
73546
разомкнут. (При разгоне привода 2 на выходе элемента 13 появляется сигнал, равный давлению питанию. Элемент 7 через преобразователь 6 коммутирует линию выбора направления подачи. Воздух ВР 5 подается на привод 3 подачи под давлением, обусловленным величиной сигнала СП, При резком возрастании Н на приводе 2 сигнал на выходе усилителя 11 увеличивается и при превышении сигнала уставки Н элемент 13 переключается. Элемент 7 отключает ВР 5, прекращая подачу комбайна на забой. Преодолев повышенную Н привод 2 вновь разгоняется, срабатывает элемент 7 и включает ВР 5. Этим обеспечивается пульсирующая подача комбайна. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ГОРНОГО КОМБАЙНА | 2001 |
|
RU2204715C1 |
| Способ управления нагрузкой угольного комбайна и устройство для его осуществления | 1988 |
|
SU1647135A1 |
| Устройство управления горной машиной | 1987 |
|
SU1476125A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Регулируемый электропривод угольного комбайна | 1986 |
|
SU1355706A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Система для испытания транспортных средств на топливную экономичность | 1985 |
|
SU1587367A1 |
| Устройство для программного регулирования | 1990 |
|
SU1837267A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМБАЙНОМ | 1971 |
|
SU312048A1 |
Изобретение относится к области автоматизации горных машин с пневмоприводом. Цель изобретения - повьпвение производительности угольного комбайна путем регулирования направления и скорости подачи (СП) по различным линиям управлеиия. По команде с пульта 1 управления включается приi
Изобретение относится к области автоматизации горных машин, использукяцих пневмоэнергию для питания силовых приводов, и может быть использовано для управления угольными комбайнами с вынесенной поданнцей частью.
Целью изобретения является повышение производительности угольного
комбайна путем регулирования направления и скорости подачи по различным линиям управления.
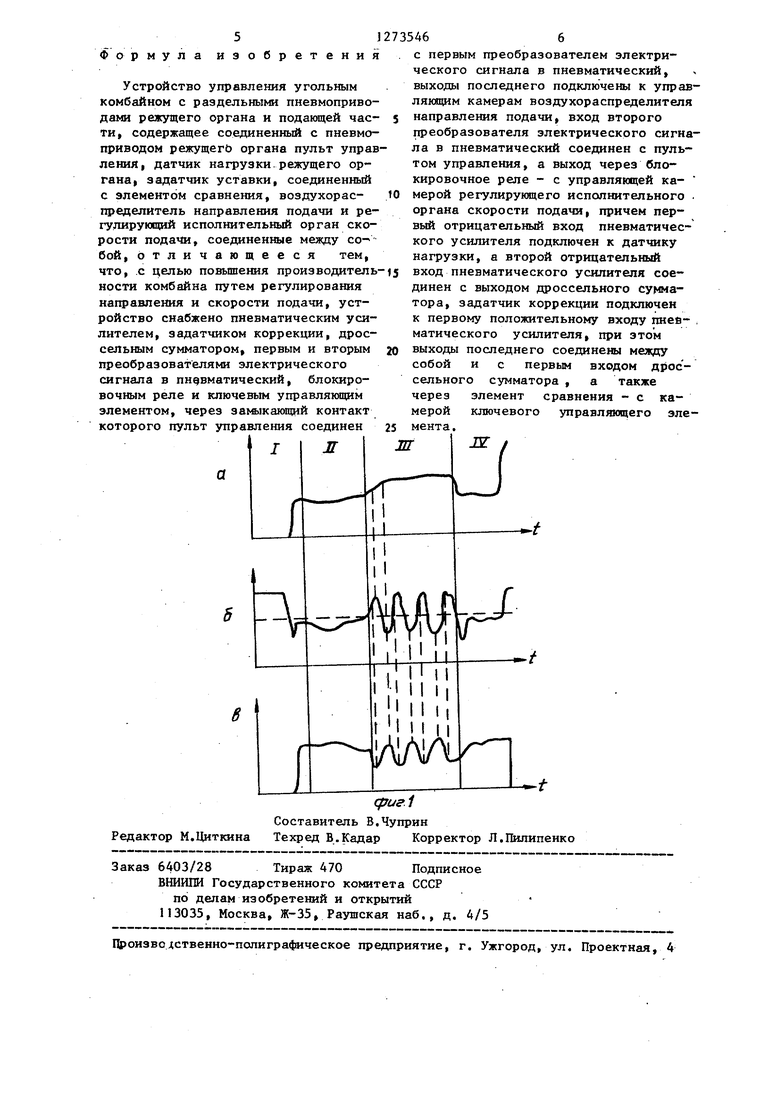
На фиг.I представлены диаграммы изменения параметров при работе комбайна: а - момент сопротивления резанию; б - выходной сигнал нагрузки в - скорость подачи; на фиг.2 - схема устройства.
Устройство фиг.2), содержит пульт управления 1,, на котором формируются команды управления - включение привода 2 регкущего органа и привода 3 подающей части. Формирование команд управления - выбор направ ления-подачи и величины скорости - выполняется одним органом управления например многопозиционным переключателем, имеющим два направления (две платы). Входы реверсивного привода 3 подающей части соединены с выходом регулирующего исполнительного,
органа 4 скорости подачи через воздухораспределитель 5 направления подачи. В линию выбора направления подачи между пультом управления 1 и первым преобразователем 6 сигналов включей контакт ключевого управляющего элемента 7, роль которого может выполнять, например, дискретный пневмоэлектропреобразователь. Первый формирующий преобразователь 6 сигналов может быть, например, эл:ектропневмопреобразователем, выходы которого соединены с управляющими камерами воздухораспределителя 5 направления подачи. Второй преобразователь 8 сигнала, вход которого соединен с выходом пульта 1 управления линией управления скоростью подачи, может быть реализован на аналоговом электропневмопреобразователе, выход которого через блокировочное реле 9 соединен с управляющей камерой регулирующего исполнительного органа 4.
Выход датчика нагрузки 10 привода 2 режущего органа соединен с первой отрицателбной камерой четырехвходового nHeBMatH4ecKoro усилителя 11, положительная камера которого соединена с задатчиком 12 коррекции сигнала нагрузки, и выз(;од четырех- входового пневматического усилителя 1I соединен с отрицательной камерой элемента сравнения 13 и с первым входом дроссельного сумматора 14, второй вход дроссельного сумматора соединен с атмосферой, а выход - с второй отрицательной камерой четьфе входового пневматического усилителя 11, выход эадатчика 15 уставки нагруэки соединен с положительной камерой элемента сравнения 13, выход последнего соединен с входной камерой ключевого управляющего элемен та 7. Устройство работает следуюпщм образом. При воздействии на пульте управление 1 на органы управления включается привод 2 режущего органа и подается сигнал величины скорости подачи через второй преобразователь 8 сигнала и блокировочное реле 9 (при наличии разрешающего сигнала от блокировочного устройства, напри мер, устройства предупредительной предпусковой сигнализации) на управ ляющую камеру регулирующего исполнительного органа 4, который включается и подает сжатый воздух на вход воздухораспределителя 5 направ ления подачи, В начальньА момент времени скорость привода 2 равна ну лю, сигнал на выходе датчика 10 нагрузки минимален, а на выходе четы рехвходового усилителя II максимален, его величина определяется уров нем сигнала с задатчика 12 коррекции сигнала нагрузки и передаточным коэ фициентом дроссельного сумматора 14 /йюссельный сумматор выполняет двоиную функцию: служит для умножения разности сигналов с датчика 10 нагрузки и. задатчика 12 коррекции на постоянный коэффициент (увеличение диапазона изменения сигнала нагрузки), а также, являясь инерционным звеном в линии обратной связи усилителя 11, обеспечивает требуемую дин мическую характеристику звена апериодический переходный процесс с перерегулированием, причем величина перерегулирования зависит от скорости изменения входного сигнала. Использование дифференциальной составляющей являет(1я сущес-увенным момен том в выполнении требований по быстродействию системы управления. Сигнал с выхода усилителя II сравнивает ;ся с сигналом, формируемым задатчиком уставки нагрузки 15, и, т.к. сигнал нагрузки превышает сигнал уставки, на выходе элемента сравнения 13 давление равно нулю, контакт ключе:вого управляющего элеме та 7 разомкнут. При разгоне привода 2 на выходе .датчика 10 нагрузки сигнал возрастает, соответственно уменьшается давление на выходе усилителя I1 и при уменьшении его ш-1же давления, формируемого задатчиком уставки нагруз.ки 15, элемент сравнения 13 переключается, на его выходе появляется сигнал, равный давлению питания. Ключевой управляющий элемент 7 замыкает свой контакт, коммутируя таким образом линию выбора направления подачи. Воздухораспределитель 5 срабатывает, подавая на вход привода 3 подачи сжатый воздух под давлением, обусловленным величиной сигнала Скорости подачи. Характер изменения параметров в пусковой период представлен на фиг,1 (зона I), В процессе выемки угля при правильном выборе уставок привод подающей части саморегулируется в определенной зоне, что обеспечивается мягкими механическими характеристиками шестеренных пневмомоторов, применяемых в качестве привода (фиг, 1 - зона II). При входе угольного комбайна в зону с повышенным сопротивлеш ем резанию, например J, выход породного прослойка, пережим пласта (фиг.1 -зона III) нагрузка на приводе режущего органа возрастает, соответственно увеличивается сигнал на выходе усилителя 11, При превышении сигналом нагрузки значения уставки нагрузки элемент сравнения 13 переключается, ключевой управляющий элемент 7 размыкает свой контакт. Воздухораспределитель 5 выключается, прекращая подачу комбайна на забой. Преодолев повышенную нагрузку, привод режущего органа вновь разгоняется, скорость вращения возрастает, срабатывает ключевой управляющий элемент 7, включая воздухораспределитель 5. Комбайн подается на забой. Процесс дискретного воздействия на привод подачи обеспечивает пульсирующую подачу комбайна.
| Способ автоматического управления выемочной машиной | 1971 |
|
SU447507A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Регулятор нагрузки горной машины с пневмоприводом | 1977 |
|
SU724728A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
