(21)4106790/22-03
(22)06.08.86
(46) J5.09.88. Бюл. № 34 ;() Научно-производственное объединение по созданию н выпуску средств автоматизацин горных машин Автомат- гормаш
(72) Д.И.Евстафьев, К.Ф.Жданов, А.И.Котлярский, Ю.А.Турииын и Д.И.Фреге (53) 622.232.72(088.8) (56) Авторское свидетельство СССР № 972089, кл. Е 21 С 35/24, 1982.
Авторское свидетельство СССР № 1250651, кл. Е 21 С 35/24, 1984.
(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 0 ШСТ№1М КОМБАЙНОМ В ПРОФИЛЕ
ПЛАСТА
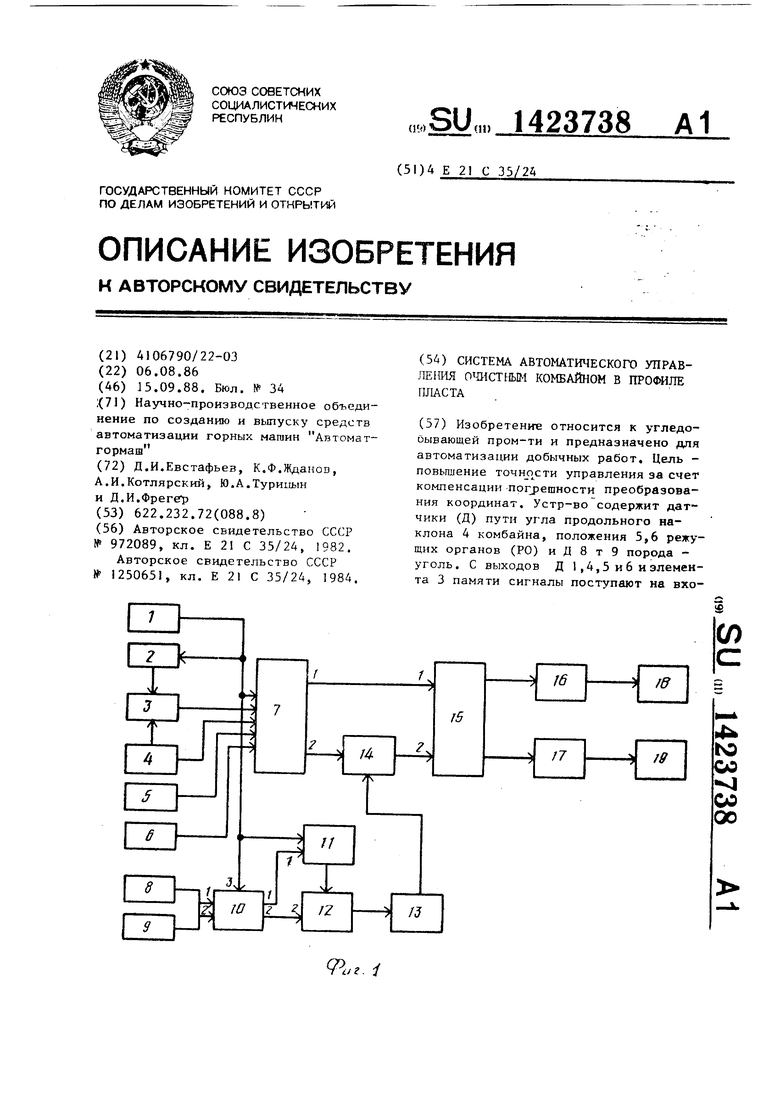
(57) Изобретени1е относится к угледобывающей пром-ти и предназначено для автоматизации добычных работ. Цель - повьпдение управления за счет компенсации norjsemHocTH преобразования координат. Устр-во содержит датчики (Д) пути угла продольного наклона 4 комбайна, положения 5,6 режущих органов (РО) и Д 8 т 9 порода - уголь. С выходов Д 1,4,5 и6 и элемента 3 памяти сигналы поступают на вхо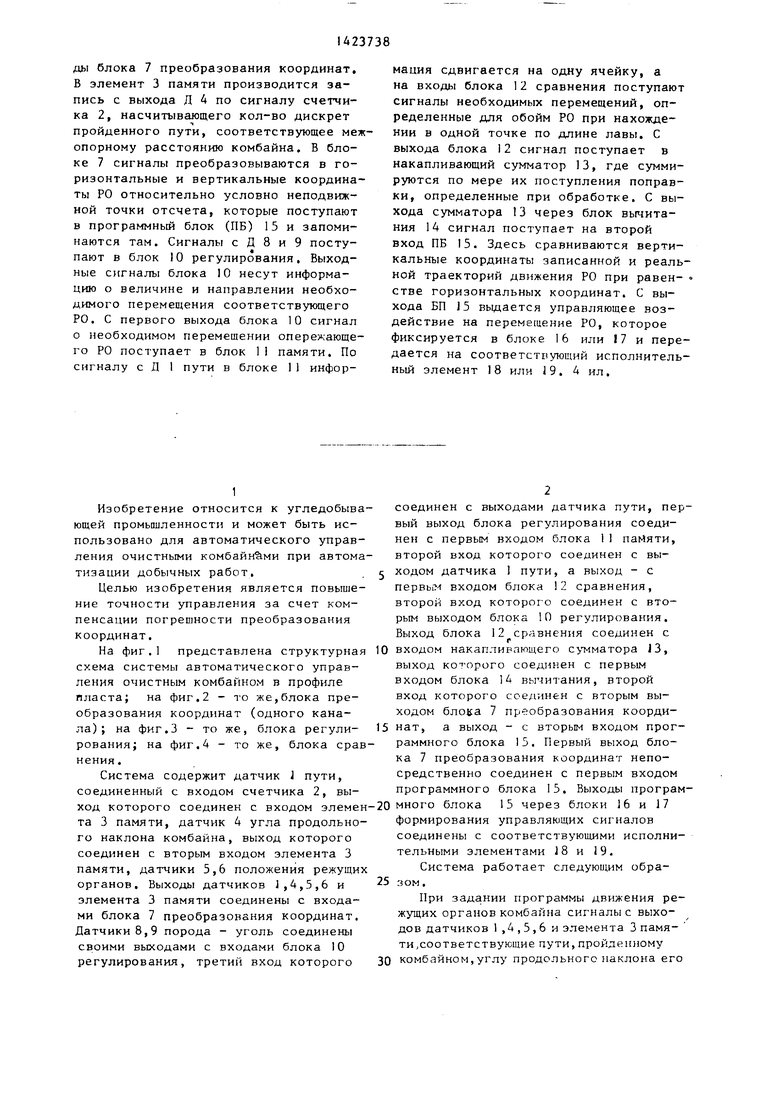
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Способ автоматического управления режущими органами очистного комбайна | 1986 |
|
SU1472670A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Система автоматического управления очистным комбайном в профиле пласта | 1991 |
|
SU1809043A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1985 |
|
SU1270321A1 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Система программного управления очистным комбайном в профиле калийного пласта | 1989 |
|
SU1810534A1 |
иг. i
4 Ю
00
со
ас
ды блока 7 преобразования координат, В элемент 3 памяти производится запись с выхода Д А по сигналу счетчика 2, насчитывающего кол-во дискрет пройденного пути, соответствующее меопорному расстоянию комбайна, В блоке 7 сигналы преобразовываются в горизонтальные и вертикальные координаты РО относительно условно неподвижной точки отсчета, которые поступают в программный блок (ПБ) 15 и запоминаются там. Сигналы с Д 8 и 9 поступают в блок 10 регулирования. Выходные сигналы блока 10 несут информацию о величине и направлении необходимого перемещения соответствующего РО. С первого выхода блока 10 сигнал о необходимом перемещении опережающего РО поступает в блок 11 памяти. По сигналу с Д 1 пути в блоке 11 инфор1
Изобретение относится к угледобывающей промышленности и может быть использовано для автоматического управления очистными комбайнами при автоматизации добычных работ.
Целью изобретения является повышение точности управления за счет компенсации погрешности преобразования координат.
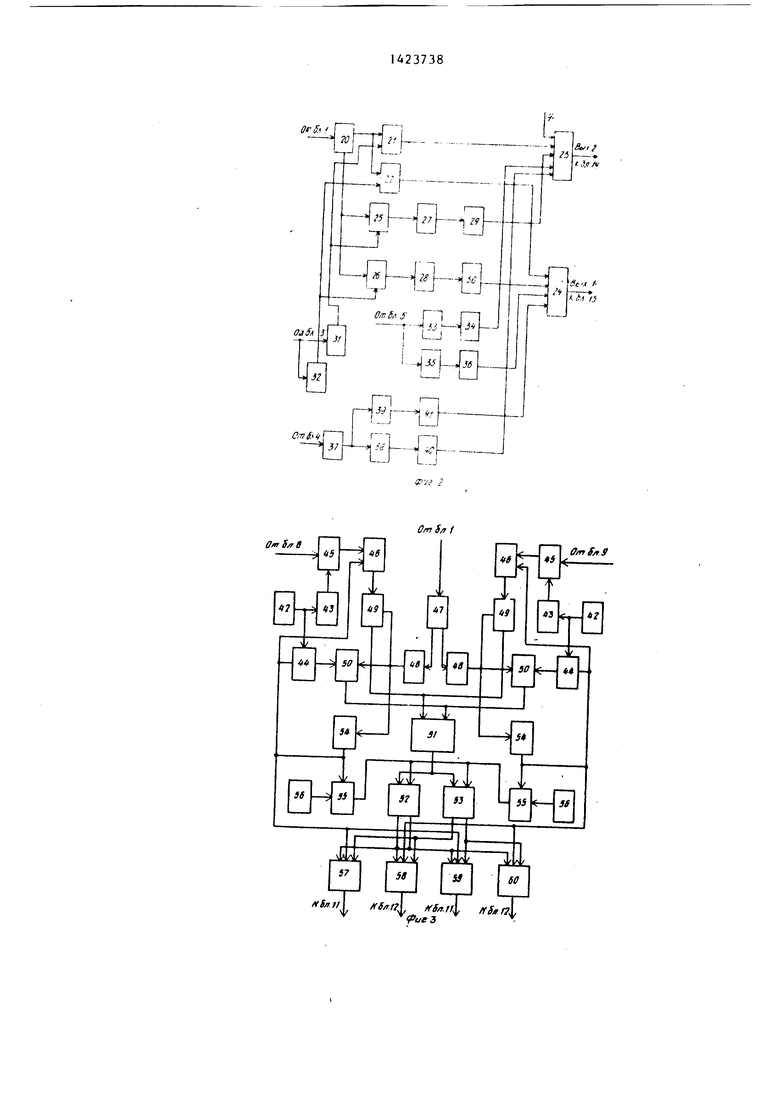
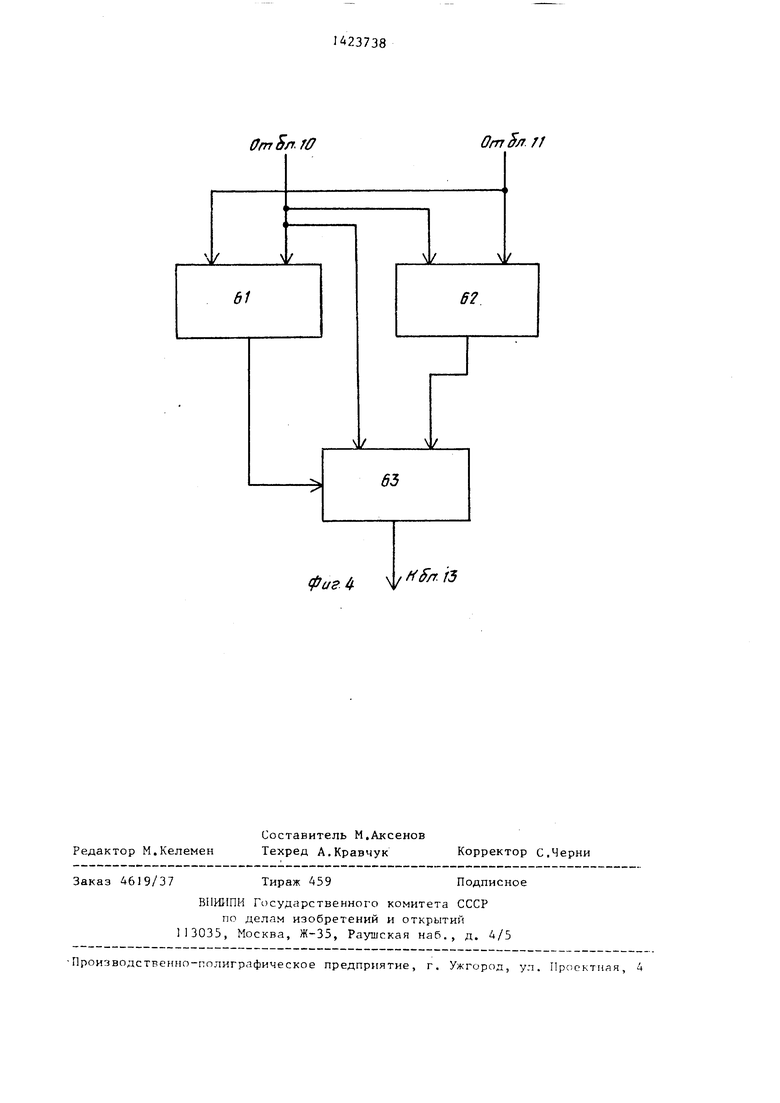
На фиг.1 представлена структурная схема системы автоматического управления очистным комбайном в профиле пласта; на фиг.2 - то же,блока преобразования координат (одного канала) ; на фиг.З - то же, блока регулирования; на фиг.4 - то же, блока сравнения .
Система содержит датчик 1 пути, соединенный с входом счетчика 2, выход которого соединен с входом элемента 3 памяти, датчик 4 угла продольного наклона комбайна, выход которого соединен с вторым входом элемента 3 памяти, датчики 5,6 положения режущих органов. Выходы датчиков 1,4,5,6 и элемента 3 памяти соединены с входами блока 7 преобразования координат. Датчики 8,9 порода - уголь соединены своими выходами с входами блока 10 регулирования, третий вход которого
мация сдвигается на одну ячейку, а на входы блока 12 сравнения поступают сигналы необходимых перемещений, определенные для обойм РО при нахождении в одной точке по длине лавы. С выхода блока 12 сигнал поступает в накапливающий сугтаатор 13, где суммируются по мере их поступления поправки, определенные при обработке. С выхода сумматора 13 через блок вычитания 14 сигнал поступает на второй вход ПБ 15. Здесь сравниваются вертикальные координаты записанной и реальной траекторий движения РО при равенстве горизонтальных координат. С выхода БП 15 выдается управляющее воздействие на перемещение РО, которое фиксируется в блоке 16 или 17 и передается на соответствующий исполнительный элемент 18 или 19. 4 ил.
соединен с выходами датчика пути, первый выход блока регулирования соединен с первым входом блока 11 памяти, второй вход которого соединен с выходом датчика 1 пути, а выход - с первьм входом блока 12 сравнения, второй вход которого соединен с вторым выходом блока 10 регулирования. Выход блока 12 сравнения соединен с
входом накапливающего сумматора J3, выход которого соединен с первым входом блока 14 вычитания, второй вход которого соединен с вторым выходом блока 7 преобразования координат, а выход - с вторым входом программного блока 15. Первый выход блока 7 преобразования координат непосредственно соединен с первым входом программного блока 15. Выходы программного блока 15 через блоки 16 и 17 формирования управляющих сигналов соединены с соответствующими исполнительными элементами 18 и 19.
Система работает следующим образом.
При задании программы движения режущих органов комбайна сигналы с выходов датчиков 1,4,5,6 и элемента 3 памяти .соответствующие пути, пройден}юму
комбайном, углу продольного наклона его
корпуса, положению его режуЕшх органов и углу продольного наклона комбайна при кратности пройденного пути расстоянию между опорами комбайна, поступают на входы блока 7 преобразования координат. Запись в элемент 3 памяти угла продольного наклона комбайна с выхода датчика производится по сигналу счетчика 2, насчитавшего количество дискрет пройденного пути, соответствующее межопорному расстоянию комбайна. В блоке 7 преобразования координат поступившие от датчиков значения преобразуются в гори- зонтальные и вертикальные координаты режущих органов относительно условно неподвижной точки отсчета по следующим рекурентным зависимостям:
У Ув-Имвп з пЧф, -ИкБ1пЧф,
+ 1дп sinC + tf) + It-sin оС
Ion COS (6 +41) + Incosa
+
где
MOO
соответственно зонтальная и вертикальная координаты геометрического центра режу- ЗО щего органа; расстояние от верхней полки конвейера до почвы пласта в том из сопряжений лавы со штре с ком, откуда было начато движение; длина проекции расстояния между опорами комдлина отрезка прямой, соединяющей геометричес кие центры режущего ор гана и опоры поворотно
Ч,
редуктора.
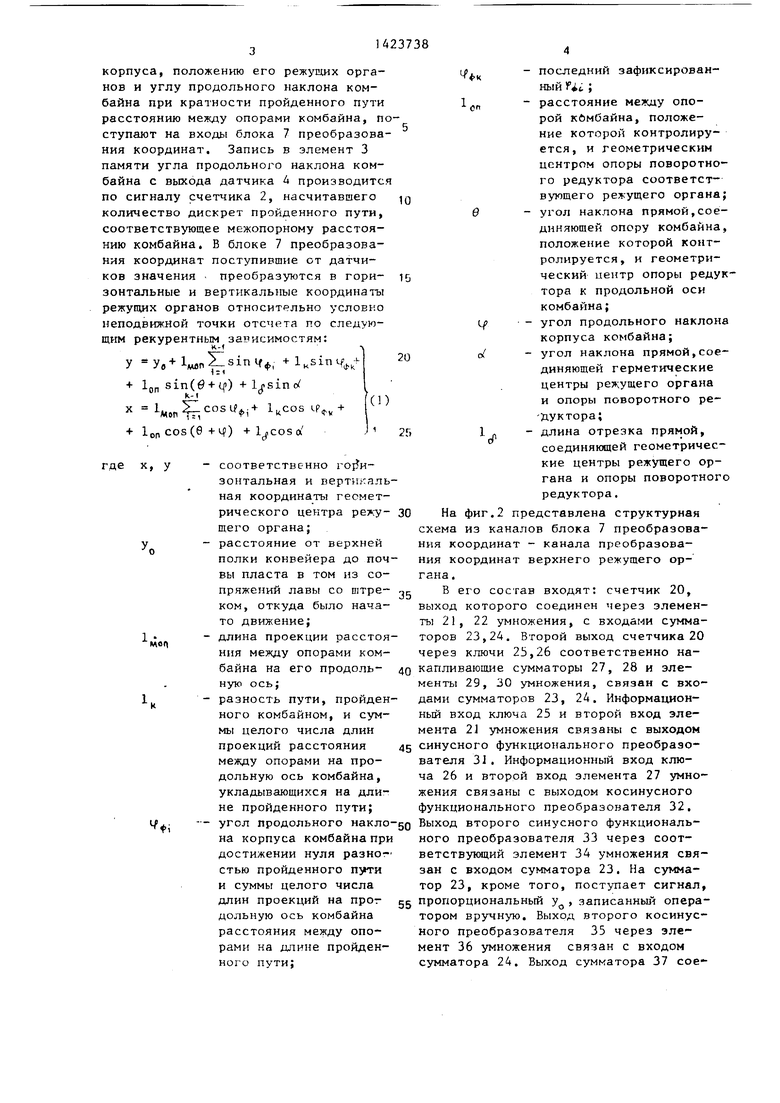
На фиг.2 представлена структурная схема из каналов блока 7 преобразования координат - канала преобразования координат верхнего режущего органа .
В его состав входят: счетчик 20, выход которого соединен через элементы 2 1 , 22 умножения, с входами сумматоров 23,24. Второй выход счетчика 20 через ключи 25,26 соответственно на- байна на его продоль- 40 капливающие сумматоры 27, 28 и эле- ную ось;менты 29, 30 умножения, связан с вхоразность пути, пройден- дами сумматоров 23, 24. Информационного комбайном, и сум- ный вход ключа 25 и второй вход элемента 2J умножения связаны с выходом 45 синусного функционального преобразователя 3J. Информационный вход ключа 26 и второй вход элемента 27 умножения связаны с выходом косинусного функционального преобразователя 32. угол продольного накло-gQ Выход второго синусного функциональна корпуса комбайна при ного преобразователя 33 через соот- достижении нуля разног- ветствующий элемент 34 умножения связан с входом сумматора 23. На сумматор 23, кроме того, поступает сигнал, 55 пропорциональный у, записанньш оператором вручную. Выход второго косинусного преобразователя 35 через эле мент 36 умножения связан с входом сумматора 24. Выход сумматора 37 сое-мы целого числа длин проекций расстояния между опорами на продольную ось комбайна, укладывающихся на длине пройденного пути;
стью пройденного пути и суммы целого числа длин проекций на прог дольную ось комбайна расстояния между опорами на длине пройденного пути;
Qir,
Ч-ФК 1
О
0
0
Ч
(
Г.
1
d
О с
последний зафиксированный fa ;
расстояние между опорой кбмбайна, положение которой контролируется, и геометрическим центром опоры поворотного редуктора соответствующего режущего органа; угол наклона прямой,соединяющей опору комбайна, положение которой контролируется, и геометрический центр опоры редуктора к продольной оси комбайна;
угол продольного наклона корпуса комбайна; угол наклона прямой,соединяющей герметические центры режущего органа и опоры поворотного ре- -дуктора;
длина отрезка прямой, соединяющей геометрические центры режущего органа и опоры поворотного
дииен с входами третьих синусного функционального преобразователя 38 и косинусного функционального преобразователя 39,выходы которых через соответствующие элементы АО ,4 1 умножения связаны с входами сумматоров 23 , 24 соответственно. Вход счетчика 20 связан с выходом датчика I пути (фиг.1) BXO;UII синусного и косинусного функционального преобразователей 31, 32 соединены с выходом элемента 3 памяти вход с:/мматора 37 - с выходом датчика А угла продольного наклона комбайна, входы синусного 33 и косинусного 35 (фиг.2) функциональных преобразователей соединены с датчиком 5 контроля положения верхнего режущего органа (фиг.1).
Функцио}1ирование канала преобразования координат верхнего (аналогично и нижнего) режущего органа сводится к пересчету данных, поступивших от ла7чиков 1,3,Л,5, и координаты верхнего режущего органа по зависимостям (1) . Группы блоков, представлен- 1ые на фиг. 2, реализуют различные сла Iаемые из формул (1). После выполне- JiiiH всех преобразований (понятных из назначений блоков) на выходе сумматора 23 появляется сигнал, соответствующий значению вертикальной коорди- HaT ji режущего органа (выход 2 блока 7 на фиг,1), а на выходе сумматора 24 - горизонтальной координать ренсущего органа (выход 1 блока 7). Выходь г;умматора 23 обоих каналов блока 7 условно показаны на фиг,1 одной линией (выход I блока 7). Аналогично изображены одной линией выходы сумматоров 24 для обоих каналов (выход 2 блока 7). Координаты каждого режущего органа поступают в программный блок 15, где запоминаются.
При отработке программы операции, выполняемые всеми перечисленными блоками, кроме программного, повторяются. Кроме того, датчики 8,9 порода - уголь контактируют расположения соответствующих режуощх органов относительно границ пласта с боковыми породами и сигналы с их выходов поступают в блок 10 регулирования.
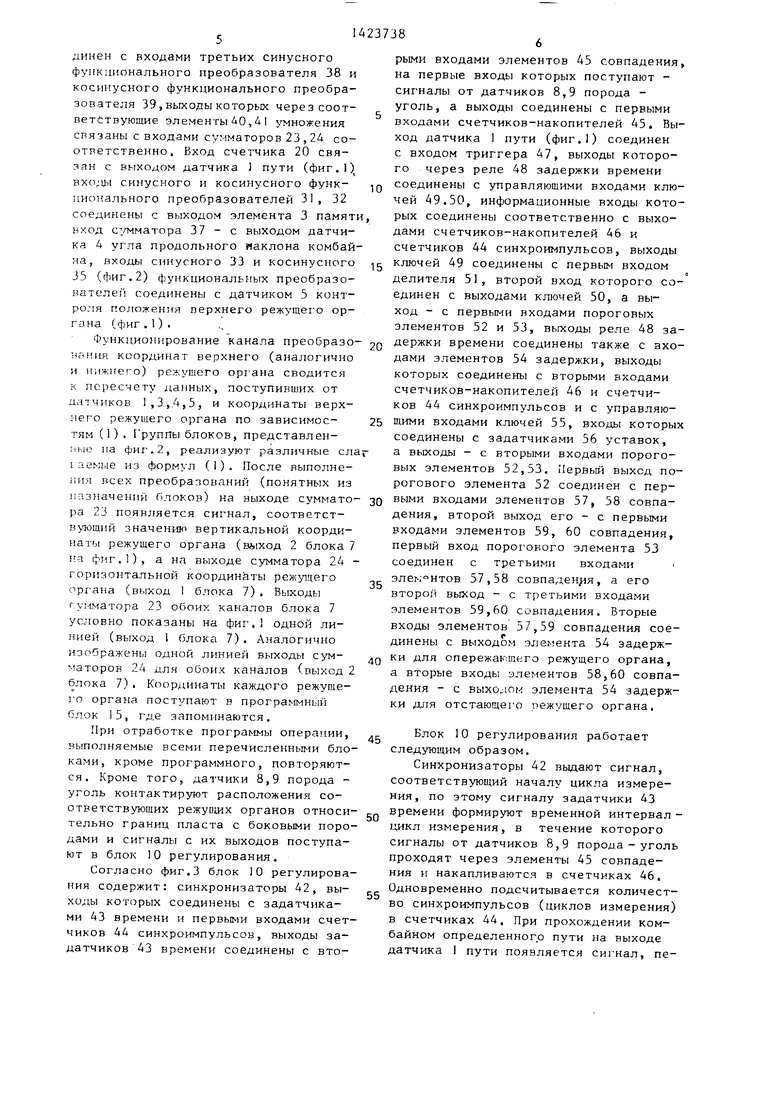
Согласно фиг.З блок 10 регулирования содержит: синхронизаторы 42, выходы которых соединены с задатчика- ми 43 времени и первыми входами счетчиков 44 синхроимпульсов, выходы за- датчиков 43 времени соединены с вто
0
рыми входами элементов 45 совпадения, на первые входы которых поступают - сигналы от датчиков 8,9 порода - уголь, а выходы соединены с первыми входами счетчиков-накопителей 45. Выход датчика 1 пути (фиг.1) соединен с входом триггера 47, выходы которого через реле 48 задержки времени соединены с управляющими входами ключей 49.50, информационные входы которых соединены соответственно с выходами счетчиков-накопителей 46 и счетчиков 44 синхроимпульсов, выходы C ключей 49 соединены с первым входом
с 1 делителя Ь1, второй вход которого соединен с выходами ключей 50, а выход - с первыми входами пороговых элементов 52 и 53, выходы реле 48 задержки времени соединены также с входами элементов 54 задержки, выходы которых соединены с вторыми входами счетчиков-накопителей 46 и счетчиков 44 синхроимпульсов и с управляю- 5 Щими входами ключей 55, входы которых соединены с задатчиками 56 уставок, а выходы - с вторыми входами пороговых элементов 52,53. Первый выход порогового элемента 52 соединен с первыми входами элементов 57, 58 совпадения, второй выход его - с первыми входами элементов 59, 60 совпадения, первый вход порогового элемента 53 соединен с третьими входами 57,58 coвпaдeн я, а его второй выход - с третьими входами элементов 59,60 совпадения. Вторые входы элементов 57,59 совпадения соединены с выходом элемента 54 задержки для опережающего режущего органа, а вторые входы элементов 58,60 совпадения - с элемента 54 задержки для отстающего режущего органа.
0
5
0
Блок 10 регулирования работает следующим образом.
Синхронизаторы 42 выдают сигнал, соответствующий началу цикла измерения, по этому сигналу задатчики 43 времени формируют временной интервал - цикл измерения, в течение которого сигналы от датчиков 8,9 порода - уголь проходят через элементы 45 совпадения и накапливаются в счетчиках 46. Одновременно подсчитывается количество синхроимпульсов (циклов измерения) в счетчиках 44. При прохождении комбайном определенного пути на выходе датчика 1 пути появляется сигнал, пе
реключающий триггер 47 в противополоное состояние, при этом изменится состояние его выходов и сработает одно из реле ДЗ задержки времени. При этом откроются соответствующие ключи 49,50, и на.входы делителя 5J поступят сигналы с выходов соответствующих счетчика-накопителя 46 и счетчика 44 синхроимпульсов. Делитель 51 делит количество сигналов от датчика 8 или 9 порода - уголь на количество циклов измерения, т.е. на его выходе появляется значение, равное среднему числу сигналов от датчика порода - уголь за цикл измерения.
Это значение поступает в пороговы элементы 52 и 53, где сравнивается с уставками, поступившими из соответствующего задатчика 56 уставок через ключ 56, открытый по сигналу реле 48 задержки времени с запаздыванием (в элементе 54 задержки) на время срабатывания делителя 51. Сигнал с выхода 54 задержки поступает также на вторые входы соответствующих счетчиков 44, 46 и обнуляет-их, подготавливая к следующим циклам измерения. Пороговые элементы 52, 53 сравнивают сигналы, поступившие на их входы: при среднем количестве сигналов с датчика порода - уголь,меньше уставки Порода, сигналы появляются на первых выходах пороговых элементов 52, 53 и приводят к срабатыванию элементов 57 или 58 совпадения (управление от породы); если среднее количество сигналов датчика порода - уголь больше уставки Уголь, сигналы появ
ляются на вторых выходах элементов 52, Q жит элементы сравнения знаков, эле53 и приведут к срабатыванию элементов 59 или 60 совпадения (управление от угля), в остальных случаях ни один из элементов 57-60 не сработает. Вторые входы элементов 57, 59 и 58, 60 совпадения соединены с выходами соответствующих элементов 54 задержки для того, чтобы выдавать управляющий сигнал только на тот режущий ор45
мент 62 выделения меньшего абсолютно го значения и регистр 63. На входы элемента 61 из блоков 10 и 11 поступают знаковые разряды их выходных сигналов, а на входы элемента 62 - абсолютные числовые значения. Выход элемента 62 соединен с входом регист ра 63, знаковьй разряд которого соединен со знаковым разрядом одного из
ган, сигналы с датчика порода - уголь gQ входных сигналов, а выход регистра
которого анализируются в данный момент. После прохождения комбайном заданного пути вновь появится сигнал на выходе датчика 1 пути, который переведет триггер 47 в противоположное состояние, и весь описанньш цикл повторится для другого режущего органа. Таким образом, на выходах элементов 57, 59 совпадения появляются сигналы.
55
является выходом блока J2 сравнения
Сигналы, соответствующие необход мым перемещениям режущих органов, в виде кодовых комбинаций поступают н входы блока 12, причем знаковые раз ряды сигналов поступают на входы эл мента 61 сравнения знаков (может бы реализован на базе логического элем та сложения МО модулю два). Абсолют
5
о
представляющие кодовую комбинацию для управления опережающим органом (выход 1 блока 10), на выходах элементов 58, 60 - для управления отстающих (выход 2), Эта кодовая комбинация несет информацию о величине и направлении (знаке) необходимого перемещения соответствующего режупего органа. Необходимое перемещение режущего органа соответствует обнаруженному датчиком 8 или 9 рассогласованию, должно обеспечить оставление угольной пачки заданной толщины и может быть как шаговым,- так и пропор- циональнь1М. С выхода 1 блока 10 сигнал о необходимости перемещении опережающего органа поступает в блокJJ памяти, где хранится до момента прихода в ту же точку по длине лавы отстающего режущего органа. Блок 11 памяти строится по принципу сдвигового регистра, количество ячеек которого равно числу циклов анализа ин5 формации датчика порода - уголь на пути, равном расстоянию между режущими органами комбайна. После каждого такого цикла информация в блоке J1 памяти сдвигается по сигналам датчика на одну ячейку, самая старая теряется и на освободивщееся место записывается новая с выхода J блока JO. Таким образом, на входы блока 12 сравнения поступают необходимые перемещения, определяемые для обоих режущих органов комбайна при нахождении их в одной и той же точке по длине лавы.
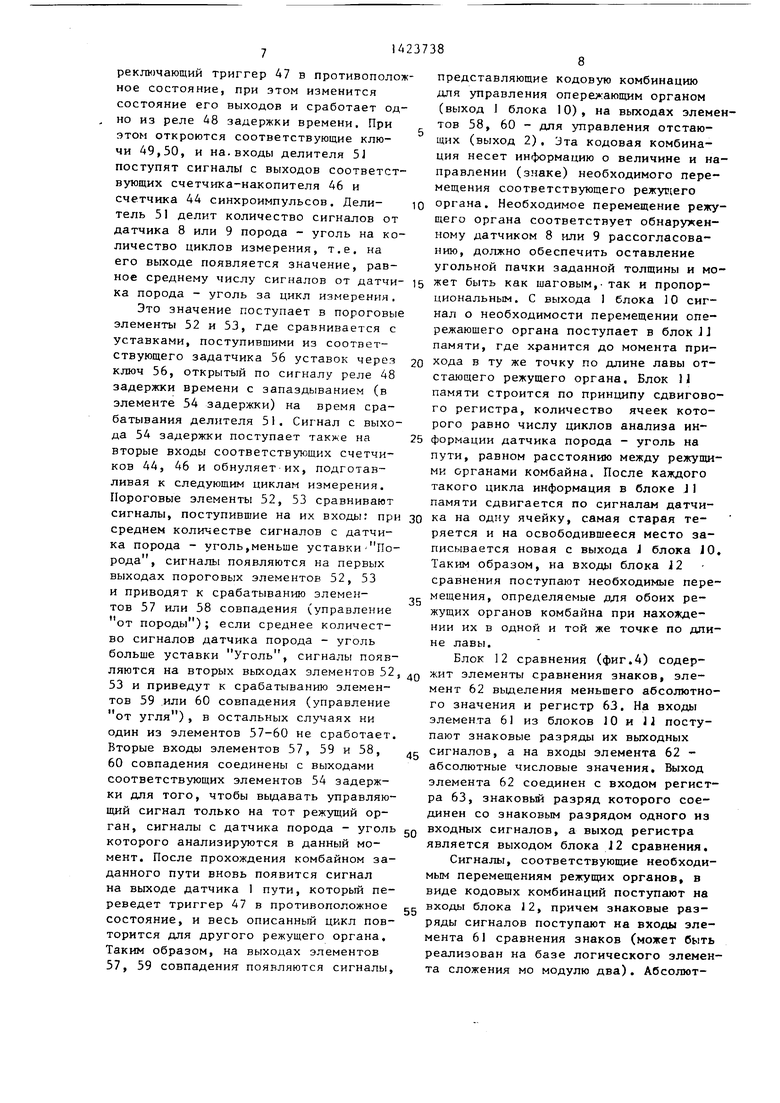
Блок 12 сравнения (фиг.4) содер
5
мент 62 выделения меньшего абсолютного значения и регистр 63. На входы элемента 61 из блоков 10 и 11 поступают знаковые разряды их выходных сигналов, а на входы элемента 62 - абсолютные числовые значения. Выход элемента 62 соединен с входом регистра 63, знаковьй разряд которого соединен со знаковым разрядом одного из
входных сигналов, а выход регистра
является выходом блока J2 сравнения.
Сигналы, соответствующие необходимым перемещениям режущих органов, в виде кодовых комбинаций поступают на входы блока 12, причем знаковые разряды сигналов поступают на входы элемента 61 сравнения знаков (может быть реализован на базе логического элемента сложения МО модулю два). Абсолют
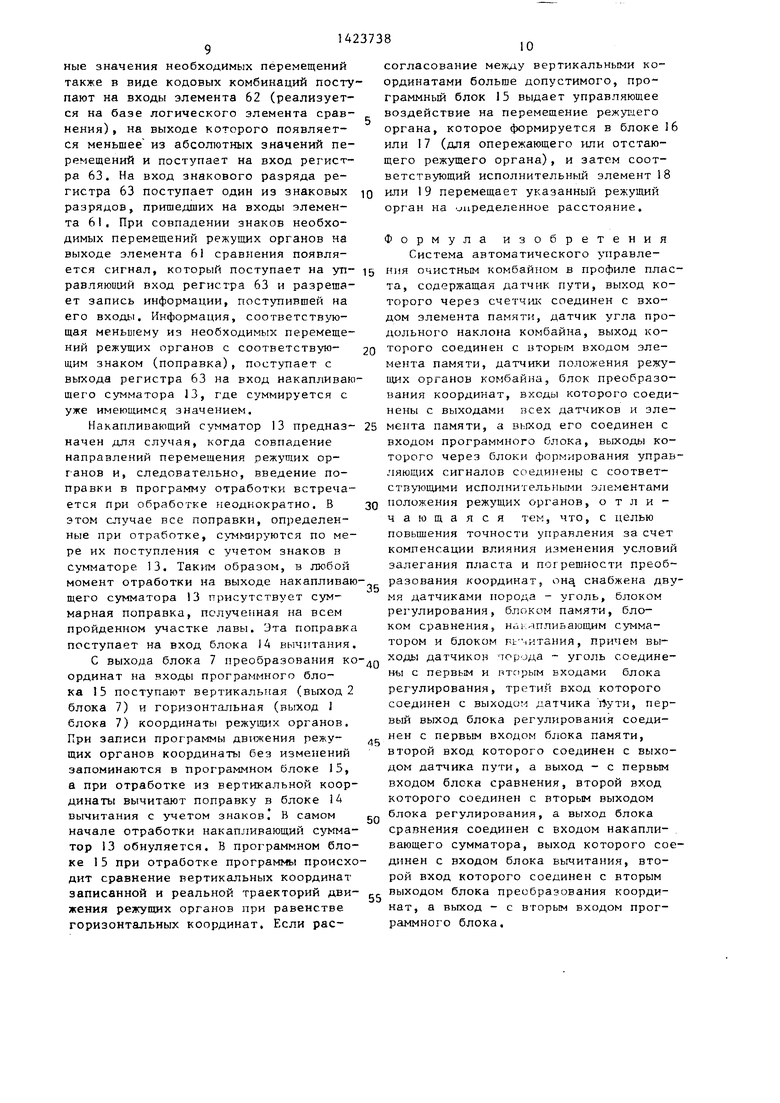
ные значения необходимых перемещений также в виде кодовых комбинаций поступают на входы элемента 62 (реализуется на базе логического элемента сравнения) , на выходе которого появляется меньшее из абсолютных значений перемещений и поступает на вход регистра 63. На вход знакового разряда регистра 63 поступает один из знаковых разрядов, пришедших на входы элемента 61, При совпадении знаков необходимых перемещений режущих органов на выходе элемента 61 сравнения появляется сигнал, который поступает на уп- равляющий вход регистра 63 и разрешает запись информации, поступившей на его входы. Информация, соответствующая меньшему из необходимых перемещений режущих органов с соответствую- щим знаком (поправка), поступает с выхода регистра 63 на вход накапливающего сумматора 13, где суммируется с уже имеющимся значением.
Накапливающий сумматор 13 предназначен для случая, когда совпадение направлений перемещения режутдих органов и, следовательно, введение поправки в программу отработки встречается при обработке неоднократно. В этом случае все поправки, определенные при отработке, суммируются по мере их поступления с учетом знаков в с мматоре 13. образом, в любой момент отработки на выходе накапливающего сумматора 13 присутствует суммарная поправка, полученная на всем пройденном участке лавы. Эта поправк
Система автоматического управления очистным комбайном в профиле плас та, содержащая датчик пути, выход которого через счетчшч соединен с входом элемента памяти, датчик угла продольного наклона комбайна, выход которого соединен с вторым входом элемента памяти, датчики положения режу- щи.х органов комбайна, блок преобразования координат, входы которого соединены с выходами всех датчиков и элемента памяти, а выход его соединен с входом программного блока, выходы которого через блоки формирования управ ляющих сигналов соединены с соответствующими исполнительными элементами положения режущих органов, отличающаяся тем, что, с целью повьш1ения точности управления за счет компенсации влияния изменения условий залегания пласта и погрешности преобразования координат, он снабжена дву мя датчиками порода - уголь, блоком регулирования, блоком памяти, блоком сравнения, ныкапливающим сумматором и блоком рЁ читания, причем вы45
поступает на вход блока 1А вычитания.
С выхода блока 7 преобразования оды датчиков -торуда уголь соедине- ординат на входы программного блока 15 поступают вертикальная (выход 2 блока 7) и горизонтальная (выход блока 7) координаты режу1 а5х органов. При записи программы дв1гаения режущих органов координаты без изменений запоминаются в программном блоке 15, а при отработке из вертикальной координаты вычитают поправку в блоке 14 вычитания с учетом знаков. В самом начале отработки накапливающий сумматор 13 обнуляется. В программном блоке 15 при отработке программы происходит сравнение вертикальных координат записанной и реальной траекторий дви- gc выходом блока преобразования коорди- жения режущих органов при равенстве нат, а выход - с вторым входом прог- горизонтальных координат. Если рас50
ны с первым и ртс1рьгм входами блока регулирования, третий вход которого соединен с выходом датчика Лути, первый выход блока регулирования соединен с первым входом блока памяти, второй вход которого соединен с выходом датчика пути, а выход - с первым входом блока сравнения, второй вход которого соединен с вторым выходом блока регулирования, а выход блока сравнения соединен с входом накапливающего сумматора, выход которого сое динен с входом блока вычитания, второй вход которого соединен с вторым
раммного блока.
0
1520 25
30
35
согласование между вертикальными координатами больше допустимого, программный блок 15 выдает управляющее воздействие на перемещение режушего органа, которое формируется в блоке 16 или 17 (для опережающего или отстающего режущего органа), и затем соответствующий исполнительный элемент 18 или 19 перемещает указанный режущий орган на определенное расстояние.
Формула изобретения
Система автоматического управления очистным комбайном в профиле пласта, содержащая датчик пути, выход которого через счетчшч соединен с входом элемента памяти, датчик угла продольного наклона комбайна, выход которого соединен с вторым входом элемента памяти, датчики положения режу- щи.х органов комбайна, блок преобразования координат, входы которого соединены с выходами всех датчиков и элемента памяти, а выход его соединен с входом программного блока, выходы которого через блоки формирования управляющих сигналов соединены с соответствующими исполнительными элементами положения режущих органов, отличающаяся тем, что, с целью повьш1ения точности управления за счет компенсации влияния изменения условий залегания пласта и погрешности преобразования координат, он снабжена двумя датчиками порода - уголь, блоком регулирования, блоком памяти, блоком сравнения, ныкапливающим сумматором и блоком рЁ читания, причем вы
оды датчиков -торуда уголь соедине- выходом блока преобразования коорди- нат, а выход - с вторым входом прог-
ны с первым и ртс1рьгм входами блока регулирования, третий вход которого соединен с выходом датчика Лути, первый выход блока регулирования соединен с первым входом блока памяти, второй вход которого соединен с выходом датчика пути, а выход - с первым входом блока сравнения, второй вход которого соединен с вторым выходом блока регулирования, а выход блока сравнения соединен с входом накапливающего сумматора, выход которого соединен с входом блока вычитания, второй вход которого соединен с вторым
оды датчиков -то выходом блока пр нат, а выход - с
раммного блока.
Of if) ,
Ояг /гв
s s ffsT
ГЛ - 1J i.n fv
-A k-1 1}
Omf/.S
ffrrrS.rff
f
f
61
фиг 4 V
П
L
6
L.
/
65
