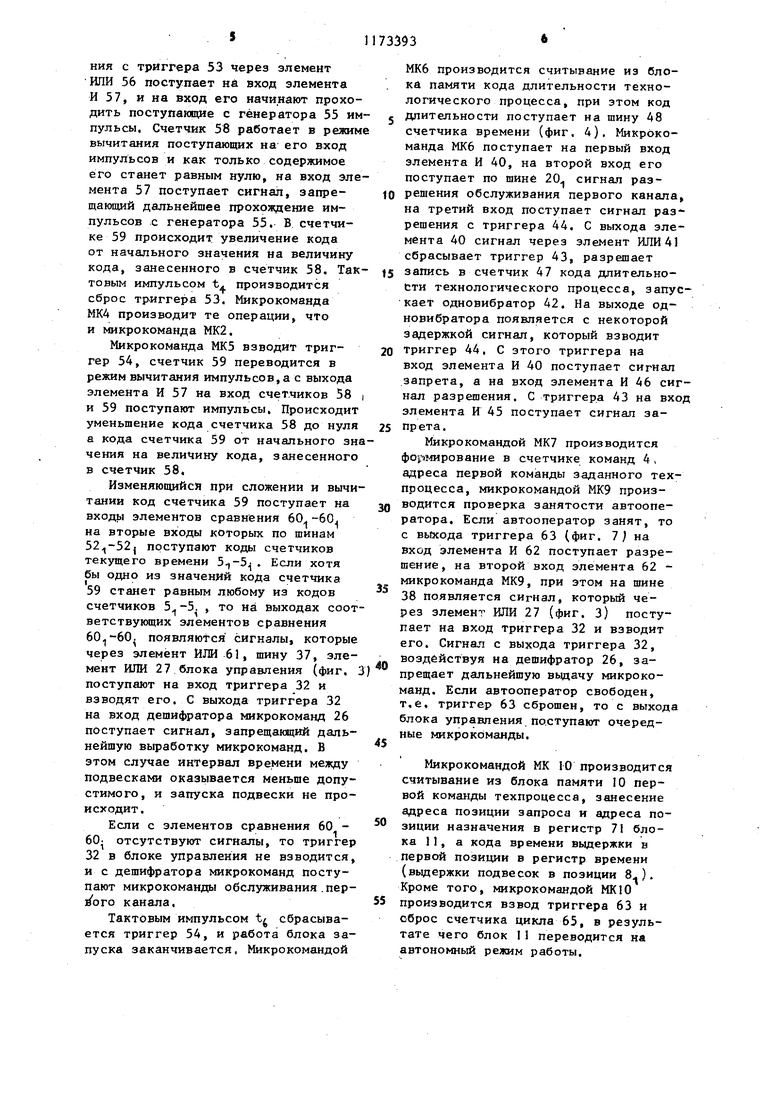
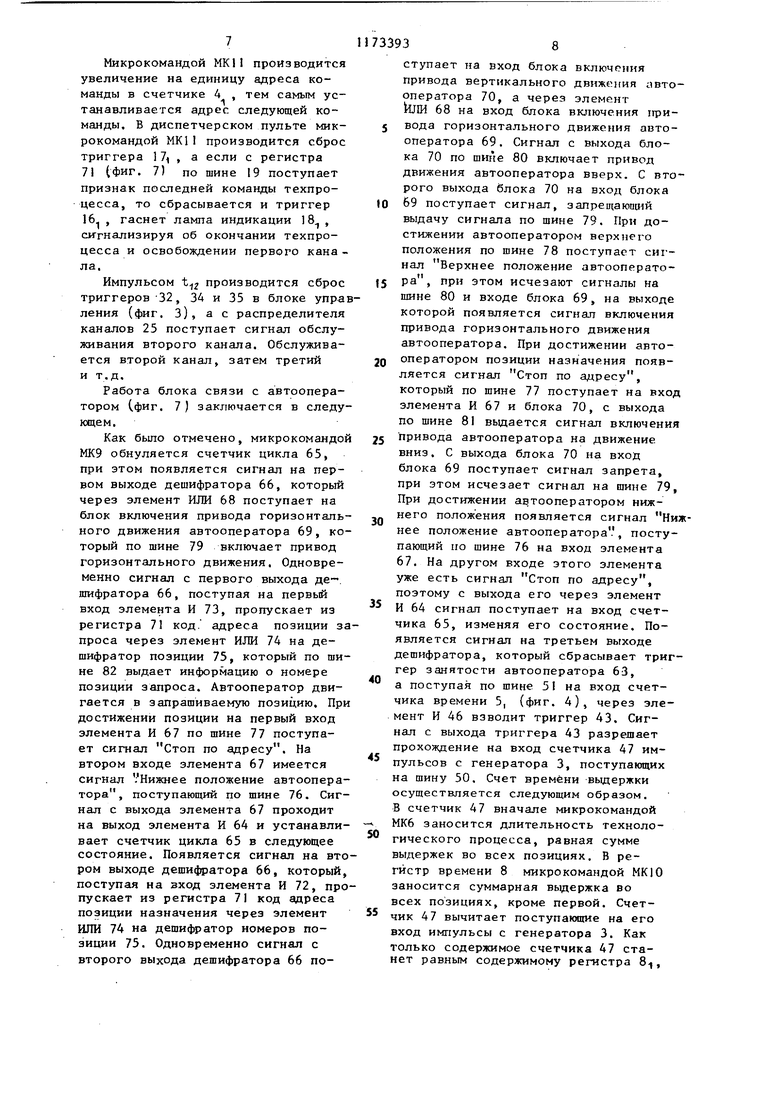
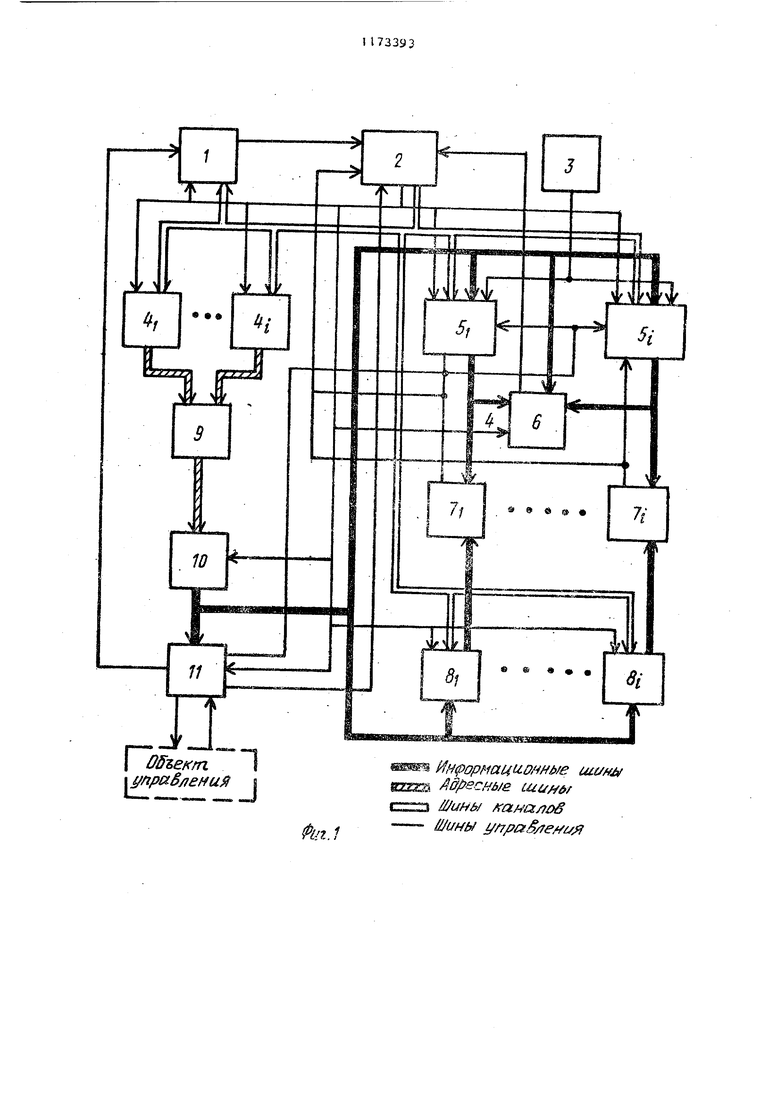
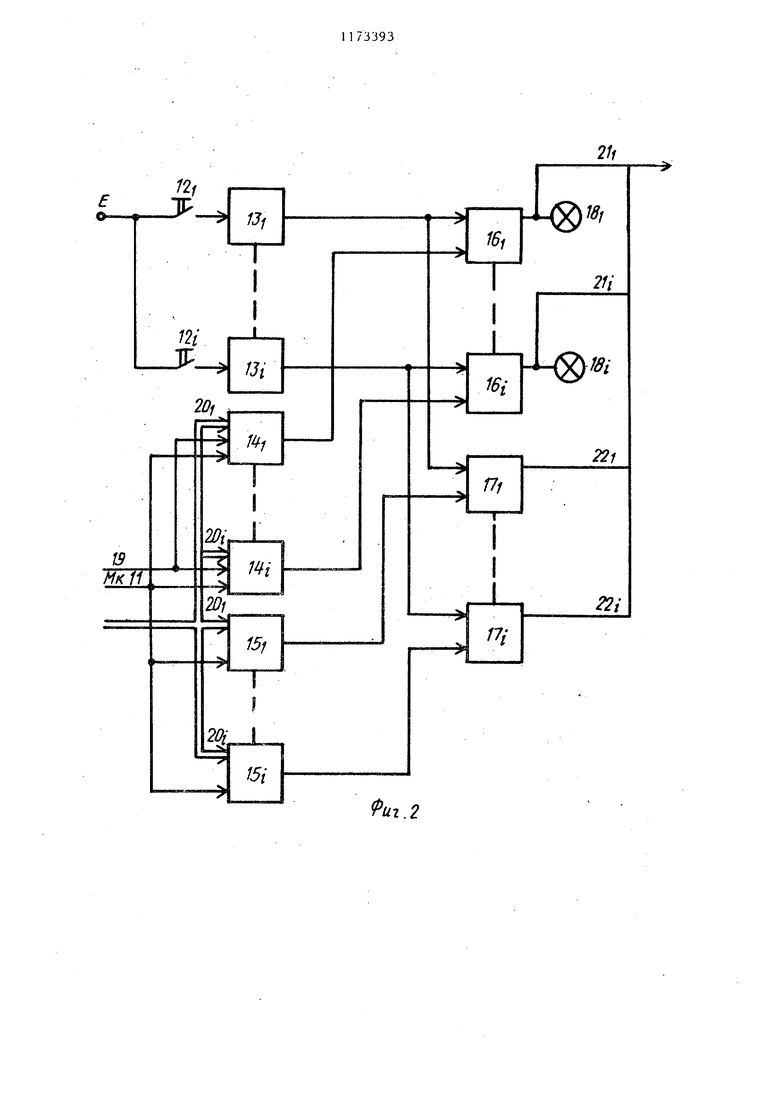
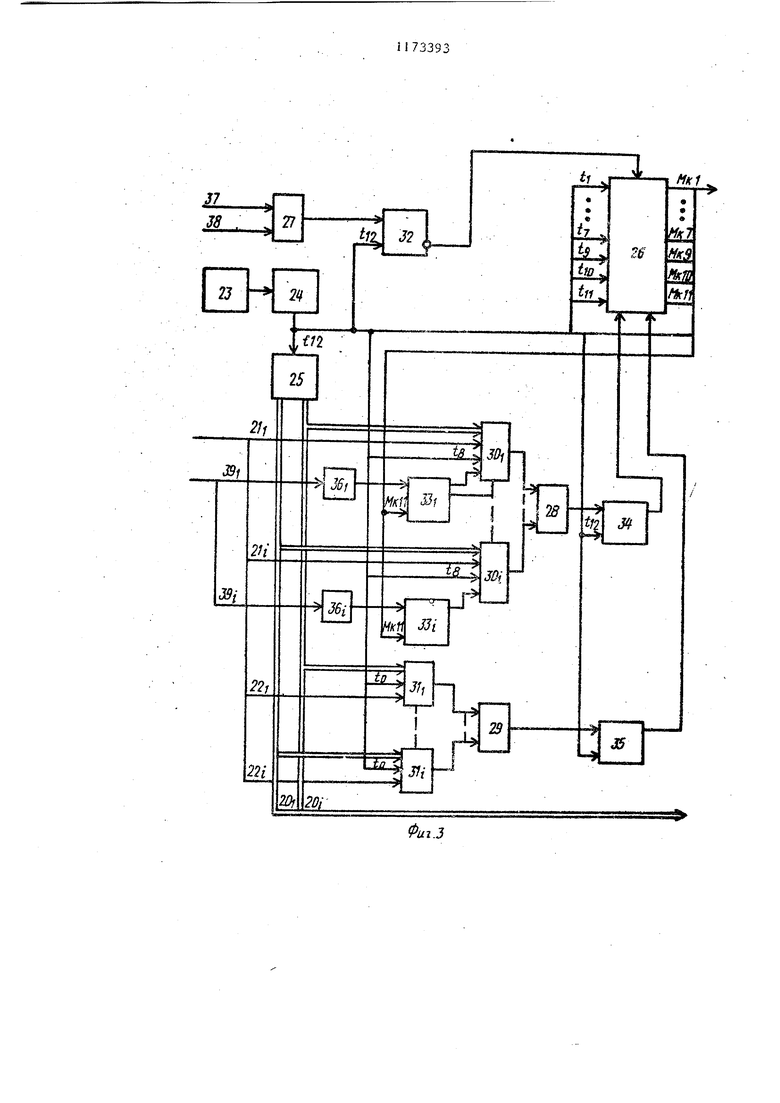
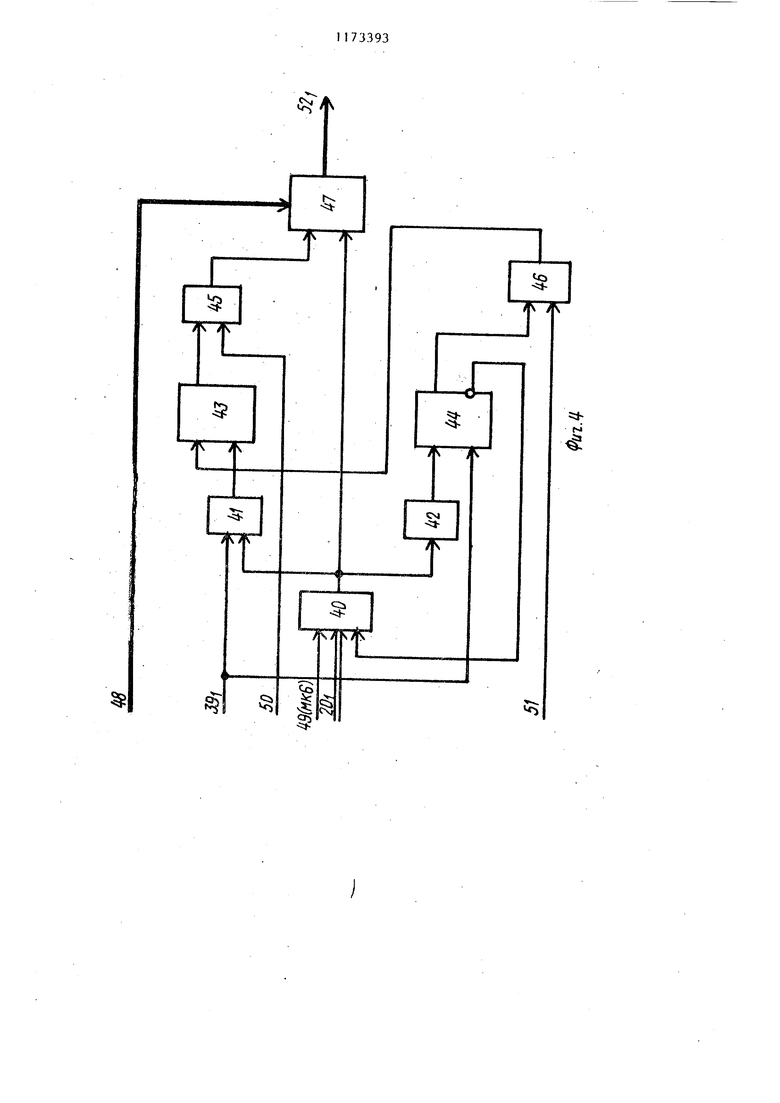
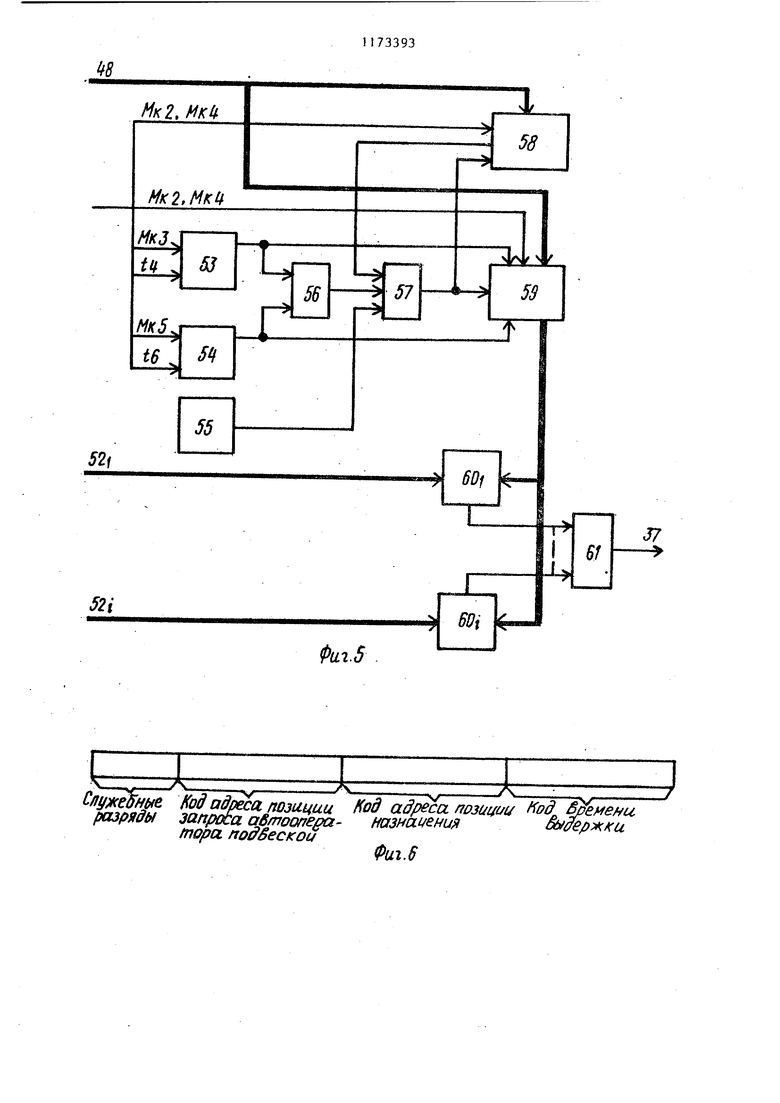
I Изобретение относится к автоматическому управлению и может быть применено при автоматизации агрегатных многопроцессных гальванических линий. Целью изобретения является повышение точности и надежности устройства, В этом устройстве счетчики времени подсчитывают и текущее время движения подвесок по гальванической линии и время выдержки в каждой позиции, благодаря чему в каждый момент времени точно известно местоположение каждой подвески на линии Моменты запуска очередных подвесок определяют путем сравнения значений счетчиков времени и длительностей вновь запускаемых технологических процессов. На фиг. 1 представлена функциональная схема устройства для программного управления; на фиг. 2 функциональная схема диспетчерского пульта; на фиг. 3 - функциональная схема блока управления; на фиг. 4 - функциональная схема счетчика времени; на фиг. 5 - функциональная схема блока запуска; на фиг. 6 - структура команды; на фиг, 7 - функциональная схема блок связи с автооператором. Устройство для программного управления автоматическими линиями гальванопокрытий (фиг. 1) содержит диспетчерский пульт 1, блок управле ния 2, генератор 3 импульсов времени, счетчики команд (где i число каналов), счетчики текущего времени , блок запуска 6, бло ки сравнения 7.-7. , регистры времени задержки подвесок в позициях , элемент ИЛИ 9, блок памяти 10 и блок связи с автооператором 1 Диспетчерский пульт (фиг. 2) предназначен для задания технологи ческого процесса обработки деталей на гальванической линии и состоит из кнопок , формирователей одиночных импульсов , элемен тов И и 15-15., триггеров и , ламп индикации , входных шин 19 и 20, выход ных шин 21 и 22 и входных шин микрокоманд. Блок управления (фиг, З) включает в себя генератор тактовых импульсов 23, распределитель тактовых 2 импульсов 24 (например, кольцевые счетчики на D-триггерах), раснреде литель каналов 25, дешифратор микрокоманд 26, элементы ИЛИ 27, 28 и 29, элементы И , и ЗЦ.-З, триггеры 32, , 34 и 35, формирователи одиночных импульсов 36I36., входные шины 37, 38 и 39. Микрог программы обслуживания каналов реализуются с помощью генераторов тактовых импульсов 23, который подключен к входу последовательно соединенных распределителей тактовых импульсов 24 и каналов 25. Выходы распределителя 24 подключены к входам дешифратора микрокоманд 26, который при установленных триггерах 34 или 35 и отсутствии запрета с триггера 32 выдает последовЭтельность микрокоманд. Распределитель каналов 25 последовательно формирует разрешающие сигналы, поступающие на шины , Генератор импульсов времени 3 служит для- формирования импульсов определенной частоты, используемых для счета времени выдержки подвесок в позициях. Счетчики команд формируют последовательности адресов команд программ по перемещению подвесок с деталями по галъванической линии в соответствии с технологическими процессами, Счетчики текущего времени 5,-5 совместно с блоками сравнения и регистрами времени вьздержки подвесок в позициях обеспечивают заданные вьщержки подвесок в позициях. Кроме того, счетчики времени показывают текущее время движения подвесок по гальванической линии, необходимое при определении моментов запуска поступающих на линию подвесок. Счетчики текущего времени (фиг. 4) включает в себя элемент И 40, элемент ШШ 41, одновибратор 42, триггеры 43 и 44, элементы И 45 и 46, вычитающий счетчик 47, входные шины 48, 49, 50 и 51, выходную шину 52. Блок запуска 6 (фиг. 5) предназначен дпя формирования сигналов запуска подвесок и включает в себя триггеры 53 и 54, генератор импульсов 55, элемент ШШ 56, элемент И 57, вычитающий счетчик 58, реверсивный счетчик 59 (например, 155
3 и
НЕ 7), счетчик 59, элементы сравнения , элемент ИЛИ 61.
Элемент ИЛИ 9 обеспечивает прием кодов адресов команд с счетчиков команд и выдачу этих кодов в блок памяти 10, Последний предназначен для хранения программ, описывающих маршруты движения подвесок по гальванической линии в соответствии с технологическими процессами, является постоянным перепрограммируемым запоминающим устройством 15 УЗПП 4 К 16-3.
Команда по. перемещению подвески из одной позиции в другую (фиг.6 содержит адрес позиции запроса, где находится подвеска, вызывающая автооператора, адрес позиции назначения, в которую данную подвеску необходимо перенести, длительность выдержки в этой позиции, а также дополнительные сведения.(например, признак последней команды)
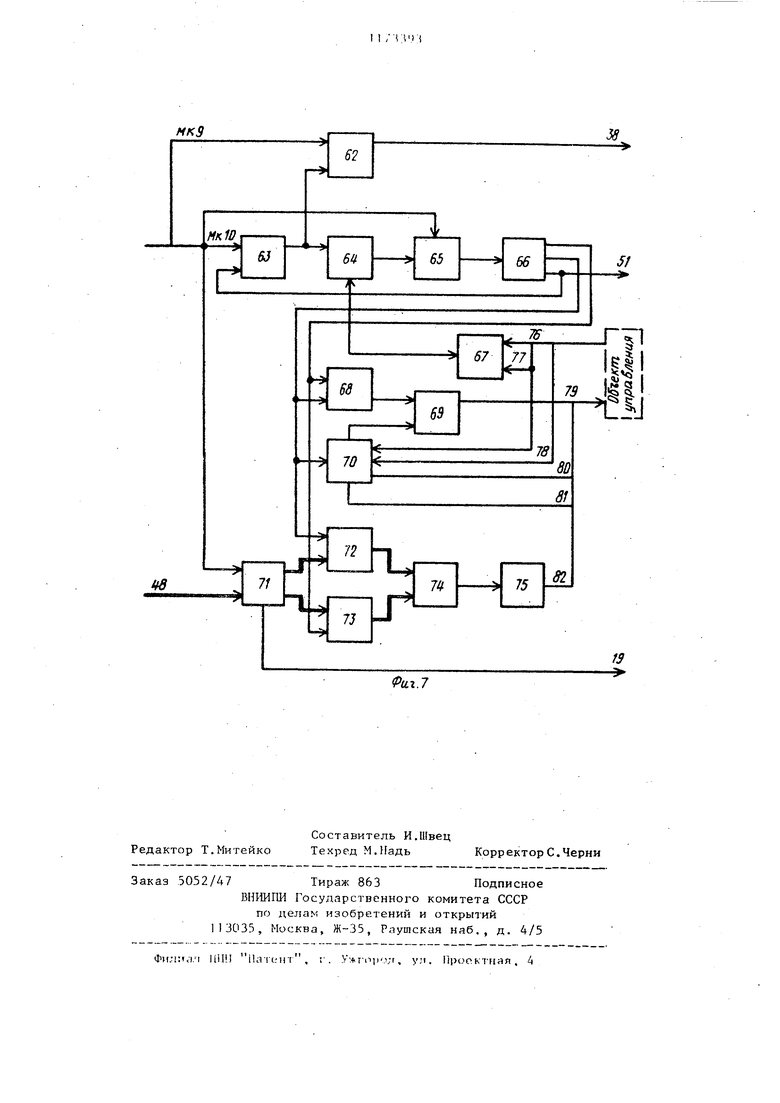
Блок связи с автооператорами 11 (фиг. 7) служит для приема команд из блока памяти 10 и формирования управляющих сигналов автооператору. Он включает в себя элемент И 62, триггер 63, элемент И 64, счетчик цикла работы автооператора 65, дешифратор 66, элемент И 67, элемент ИЛИ 68, блок включения привода горизонтального движения автооператора 69, блок включения привода верти-, кального движения автооператора 70, регистр команды 71, элементы И 72, 73, элемент ИЛИ 74, дешифратор номеров позиций 75, входы 76, 77 и 78, выходы 79, 80, 81 и 82.
Блок управления (фиг. 3} предназначен для формирования управляющих сигналов и организации синхронной работы всех функциональных узлов устройства. В блоке управления, nocTirbенному по микропрограммному принципу, принята канальная схема обслуживания подвесок с помощью автооператора. За каждой подвеской закрепляется отдельный канал. Все каналы обслуживаются в режиме разделения времени последовательно, начиная с младших номеров. Обслужив последний канал со старшим номером, блок управления переходит на обслуживание первого канала и т.д. Микропрограм.мы обслуживания каждого канала идентичны. Выполнение микропрограммы обеспечивает вызов автооператора к
33934
подвеске, перенос ее в следующую л зицию с заданием времени выдержки в ней.
Устройство работает следующим .
5 образом.
На диспетчерском пульте 1 (фиг.2) нажатием кнопки задают маршрут движения подвески с требуемым технологическим процессом. Пусть будет нетсй10 та кнопка 12 , при этом появляется импульс. На выходе формирователя одиночных импульсов 13, который взводит триггеры 16 и 17 загорается лампа индикации 18 , сигналн15 зируя о занятости первого канала. Сигнал с выхода триггера 17. по шине 22-) поступает на вход элемента И ЗЦ блока управления (фиг. 3). В момент поступления тактового импульса tjj с распределителя 25 и сигнала обслуживания первого канала с распределителя 25 появляется сигнал на выходе элемента ЗЦ, который через элемент ИЛИ 29 взводит триггера 35.
5 С дешифратора микрокоманд 26 начинают поступать микрокоманды обслуживания первого канала. Номера микрокоманд соответствуют номерам тактовых импульсов, поступающих на
- вход дешифратора 26.
Микрокомандой MKI производится формирование адреса ячейки, в которой хранится длительность технологического процесса, равная сумме выдержек во всех позициях, а также код времени, определякщий интервал между подвесками, находящимися на линии и вновь запускаемой подвески так, чтобы при выполнении данного технологического процесса исключалось опускание подвески ,в занятые позиции. Так как обслуживается первый канал, адрес формируется в счетчике команд 4 , и через элемент ИЛИ 9 поступает на вход блока
памяти 10.
Микрокомандой МК2 производится считывание информации из блока памяти и занесение ее по шинам 48 в
0 вычитающий 58 и реверсивный 59 счетчики блока запуску (фиг. 5), причем в счетчик 58 заносится код интервала между подвесками, в счетчик 59 - длительность технологического процесса.
Микрокоманда МКЗ взводит триггер 53 и счетчик 59 переводится в режим сложения импульсов. Сигнал разрешения с триггера 53 через элемент ИЛИ 56 поступает на вход элемента И 57, и на вход его начинают проходить поступающие с генератора 55 им пульсы. Счетчик 58 работает в режим вычитания поступающих на его вход импульсов и как только содержимое его станет равным нулю, на вход эле мента 57 поступает сигнал, запрещающий дальнейшее прохождение импульсов с генератора 55. В счетчике 59 происходит увеличение кода от начального значения на величину кода, занесенного в счетчик 58. Так товым импульсом t. производится сброс триггера 53. Микрокоманда МК4 производит те операции, что и микрокоманда МК2. Микрокоманда МК5 взводит триггер 54, счетчик 59 переводится в режим вычитания импульсов,а с выхода элемента И 57 на вход счетчиков 58 и 59 поступают импульсы. Происходит уменьшение кода счетчика 58 до нуля а кода счетчика 59 от начального зн чения на величину кода, занесенного в счетчик 58. Изменяющийся при сложении и вычи тании код счетчика 59 поступает на входы элементов сравнения 60.-60, на вторые входы которых по шинам поступают коды счетчиков текущего времени . Если хотя бы одно из значений кода счетчика 59 станет равным любому из кодов счетчиков 5.-5. , то на выходах соот ветствующих элементов сравнения появляются сигналы, которые через элемент ИЛИ 61, шину 37, элемент ИЛИ 27 блока управления (фиг. поступают на вход триггера 32 и взводят его. С выхода триггера 32 на вход дешифратора микрокоманд 26 поступает сигнал, запрещающий дальнейшую вьфаботку микрокоманд. В этом случае интервал времени между подвесками оказывается Меньше допустимого, и запуска подвески не происходит. Если с элементов сравнения 60 60- отсутствуют сигналы, то триггер 32 в блоке управления не взводится, и с дешифратора микрокоманд поступают микрокоманды обслуживания . канала. Тактовым импульсом t сбрасывается триггер 54, и работа блока запуска заканчивается, Микрокомандой МК6 производится считывание из блока памяти кода длительности технологического процесса, при этом код длительности поступает на шину 48 счетчика времени (фиг. 4), Микрокоманда МК6 поступает на первый вход элемента И 40, на второй вход его поступает по шине 20 сигнал разрешения обслуживания первого канала, на третий вход поступает сигнал раз решения с триггера 44. С выхода элемента 40 сигнал через элемент ИЛИ 41 сбрасывает триггер 43, разрешает запись в счетчик 47 кода длительности технологического процесса, запускает одновибратор 42. На выходе одновибратора появляется с некоторой задержкой сигнал, который взводит триггер 44. С этого триггера на вход элемента И 40 поступает сигнал запрета, а на вход элемента И 46 сигнал разрешения. С триггера 43 на вход элемента И 45 поступает сигнал запрета. Микрокомандой МК7 производится формирование в счетчике команд 4, адреса первой команды заданного техпроцесса, микрокомандой МК9 производится проверка занятости автооператора. Если автооператор занят, то с вь{хода триггера 63 (фиг. 7) на вход элемента И 62 поступает разрешение, на второй вход элемента 62 микрокоманда МК9, при этом на шине 38 появляется сигнал, который через элемент ШШ 27 (фиг. 3) поступает на вход триггера 32 и взводит его. Сигнал с выхода триггера 32, воздействуя на дешифратор 26, запрещает дальнейшую вьщачу микрокоманд. Если автооператор свободен, т.е. триггер 63 сброшен, то с выхода блока управления поступают очередные микрокоманды. Микрокомандой МК 10 производится считывание из блока памяти 10 первой команды техпроцесса, занесение адреса позиции запроса и адреса позиции назначения в регистр 71 блока 11, а кода времени выдержки в первой позиции в регистр времени (вьщержки подвесок в позиции 8). Кроме того, микрокомандой МК10 производится взвод триггера 63 и сброс счетчика цикла 65, в результате чего блок I1 переводится на автономный режим работы.
Микрокомандой МК11 производится увеличение на единицу адреса команды в счетчике 4 , тем самым устанавливается адрес следующей команды. В диспетчерском пульте микрокомандой МК11 производится сброс триггера 17 , а если с регистра 71 (фиг. 7) по шине 19 поступает признак последней команды техпроцесса, то сбрасывается и триггер 16- , гаснет лампа индикации 18 , сигнализируя об окончании техпроцесса и освобождении первого кана ла.
Импульсом производится сброс триггеров -32, 34 и 35 в блоке управления (фиг. 3), ас распределителя каналов 25 поступает сигнал обслуживания второго канала. Обслуживается второй канал, затем третий и т.д.
Работа блока связи с автооператором Сфиг. 7 ) заключается в следующем.
Как было отмечено, микрокомандой МК9 обнуляется счетчик цикла 65, при этом появляется сигнал на первом выходе дешифратора 66, который через элемент ИЛИ 68 поступает на блок включения привода горизонтального движения автооператора 69, который по шине 79 включает привод горизонтального движения. Одновременно сигнал с первого выхода де-. шифратора 66, поступая на первьй вход элемента И 73, пропускает из регистра 71 код. адреса позиции запроса через элемент ИЛИ 74 на дешифратор позиции 75, который по шине 82 выдает информацию о номере позиции запроса. Автооператор двигается в запрашиваемую позицию. При достижении позиции на первый вход элемента И 67 по шине 77 поступает сигнал Стоп по адресу. На втором входе элемента 67 имеется сигнал Нижнее положение автооператора , поступающий по шине 76. Сигнал с выхода элемента 67 проходит на выход элемента И 64 и устанавливает счетчик цикла 65 в следующее состояние. Появляется сигнал на втором выходе дешифратора 66, который, поступая на вход элемента И 72, пропускает из регистра 71 код адреса позиции назначения через элемент ИЛИ 74 на дешифратор номеров позиции 75. Одновременно сигнал с второго выхода дешифратора 66 поступает на вход блока включения привода вертикального движения автооператора 70, а через элемент kjIH 68 на вход блока вю1ючения ггри5 вода горизонтального движения автооператора 69. Сигнал с выхода блока 70 по шине 80 включает привод движения автооператора вверх. С второго выхода блока 70 на вход блока
0 69 поступает сигнал, запрещаюпцш выдачу сигнала по шине 79. При достижении автооператором верхнего положения по шине 78 поступает сигнал Верхнее положение автооперато5 ра, при этом исчезают сигналы на шине 80 и входе блока 69, на выходе которой появляется сигнап включения привода горизонтального движения автооператора. При достижении автоQ оператором позиции назначения появляется сигнал Стоп по адресу, который по шине 77 поступает на вход элемента И 67 и блока 70, с выхода по шине 81 вьщается сигнал включения
5 привода автооператора на движение вниз. С выхода блока 70 на вход блока 69 поступает сигнал запрета, при этом исчезает сигнап на шине 79, При достижении автооператором нижнего положения появляется сигнал Нижнее положение автооператора., поступающий по шине 76 на вход элемента 67. На другом входе этого элемента уже есть сигнал Стоп по адресу, поэтому с выхода его через элемент И 64 сигнал поступает на вход счетчика 65, изменяя его состояние. Появляется сигнал на третьем выходе дешифратора, который сбрасывает три1- гер занятости автооператора 63,
а поступая по шине 51 на вход счетчика времени 5, (фиг. 4), через элемент И 46 взводит триггер 43. Сигнал с выхода триггера 43 разрешает прохождение на вход счетчика 47 импульсов с генератора 3, поступающих на шину 50. Счет времени выдержки осуществляется следующим образом. В счетчик 47 вначале микрокомандой МК6 заносится длительность технологического процесса, равная сумме выдержек во всех позициях. В регистр времени 8 микрокомандой МК10 заносится суммарная вьщержка во всех позициях, кроме первой. Счетчик 47 вычитает поступающие на его вход импульсы с генератора 3. Как только содержимое счетчика 47 станет равным содержимому регистра 8,
9
т.е. после окончания времени вьодержки в первой позиции, на выходе блока сравнения 1, появляется сигнал, который по ш.ине 39 поступает в счетчик времени и сбрасывает триггеры 43 и 44, Счетчик времени выключается. В блоке управления (фиг. 3 ) сигнал по шине 39 поступает на вход формирователя одиночного импульса 36, при этом на его выходе появляется импульс, который взводит триггер 33 . С выхода триггера 33 на вход элемента И 30, поступает разрешение. Так как по шине 2 Ц поступает также синал разрешения, то в момент поступления сигнала обслуживания первого канала к тактового импульса на выходе элемента 301 появляется сигнал, который через элемент ИЛИ 2 взводит триггер 34. С дешифратора микрокоманд поступают микрокомады обслуживании первого канала MK9-MKI1, Вновь производится проверка занятости автооператора, в регистр времени 5/ заносится суммарная выдержка в позициях, кроме первой и второй, в регистр команд 71 (фиг. 7 ) заносится но5зьй адрес позиции запроса и позиции назначения, в счетчике команд 4 устанавливается адрес следующей команды, осуществляется перенос подвески в позицию назначения, включается счетчик 5х , и после окончания выдержки во второй позиции вновь повторяется цикл обслуживания подвески и т,д. пока не будет выполнена последняя команда, после выполнения которой, как было рассмотрено, микрокомандой МК11 сбрасывается триггер 1б:| и гаснет лампа индикации iS, , сигнализируя об окочании технологического процесса,
Таким образом, введение в состав устройства регистров 8,,- 8
339310
позволяет использовать счетчики времени . в качестве счетчиков текущего времени и счетчиков времени выдержки в отдельных позициях.
5 Отличие предлагаемого устройства от прототипа состоит в том, что в счетчик текущего времени при запуске заносится общее предполагаемое время движения подвески по
0 гальванической линии, включая суммарную выдержку во всех позициях, суммарное время движения авторператоров и предполагаемое время ожидания подвеской автооператора по15 еле окончания выдержки в позициях. За счет различного времени ожидания автооператоров реальное местоположение подвесок по мере удаления от позиции загрузки все более
0 отличается от предполагаемого,в связи с этим приходится увеличивать-- , интервалы между движущимися по гальванической линии подвесками, что учитывается при запуске, а это
5 приводит к снижению эффективности работы гальванической линии.
В предлагаемом устройстве в счетчики текущего времени заносятся при запуске только суммарные времена выдержек в позициях. Счетчики времени включаются после опускания подвесок в позиции назначения и выключаются после окончания вьодержек в этих позициях J, и . содержимое этих
счетчиков в любой момент времени соответствует суммарным вьщержкам подвесок в оотавшихся до выгрузки позициях. Независимо от времени ожидания автооператора всегда точно известно местоположение каждой подвески на гальванической линии, что позволяет производить более точно запуск очередной подвески, а это приводит к повышению производительности работы
гальванической линии примерно на 15%.
Фиг. 1
Шины i/frpaS/fe f
/2/
ТР
13
Т I I
Wi
16i
21i
ni
/J/
16{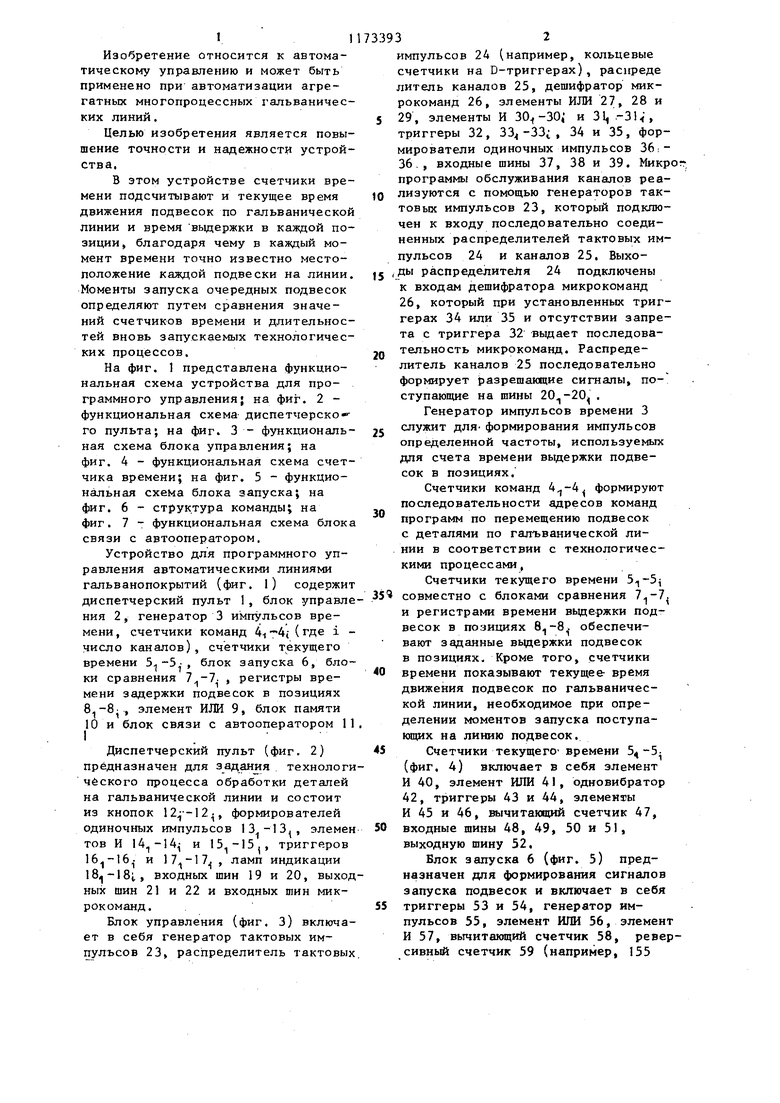


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для централизованногопРОгРАММНОгО упРАВлЕНия АВТООпЕРА-ТОРАМи | 1978 |
|
SU815716A1 |
| Устройство для программного управления | 1979 |
|
SU842713A1 |
| Устройство для программного управления | 1980 |
|
SU954940A2 |
| Установка для управления автооператорами гальванических линий | 1978 |
|
SU749946A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИ ЛИНИЯМИ ГАЛЬВАНОПОКРЫТИЙ, содержащее диспетчерский пульт, блок запуска и последовательно соединенные блок управления, счетчики команд, элемент ИЛИ, блок памяти и блок связи с автооператором, а также последовательно соединенные генератор импульсов, счетчики текущего времени и блоки сравнения, выходы которых соединены с первым входом блока управления и с вторыми входами соответствующих счетчиков текущего времени, подключенных третьими входами к первому выходу блока управпения, четвертыми входами - к второму выходу блока управления, к вторым входам счетчиков команд и к второму входу диспетчерского пульта, пятыми входами - к первому входу блока запуска, первый выход блока управления соединен с первым входом диспетчерского пульта, с вторыми входами блока памяти, блока запуска и блока связи с автооператором, первый выход которого через диспетчерский пульт подключен к второму входу блока управления, а второй выход - к третьему входу блока управления, выход блока зaпуска соединен с четвертым входом блока управления, а третьи -входы блока запуска - с выходами соответS ствующих счетчиков текущего времени, отличающееся тем, (Л что, с целью повышения точности и с надежности работы устройства, в него . введены регистры времени задержки подвесок в позициях, соединенные первыми входами с первым выходом блока управления, вторыми входами - с вторым выходом блока управ | ления, третьими входами - с выходом &0 блока памяти, а выходами - с вторысо ми вход,ами соответствующих блоков QO сравнения, третий выход блока свя00 зи с автооператором соединен с шестыми входами счетчиков текущего времени.
19
/
151
221
22г
/7/
иг.2
4 1 ч
4,
to
«
5
S3
ГЖ
rj €
1Г
Cvj
14 Код адреса позиции разряды запрк:а аб/поопе тора noffSecKOtf Код адреса позаи{/и f odepef e/ u назиаиени ob/cfef) Фиг.6
Ри.г.7
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
