N3
СО
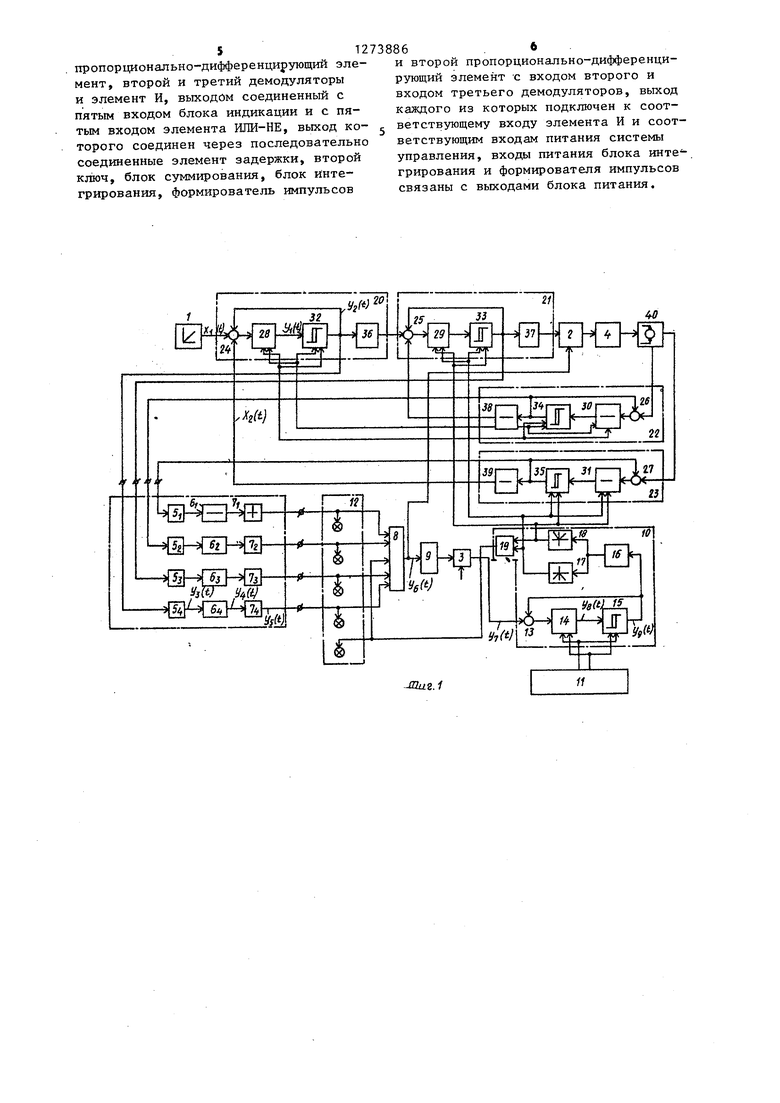
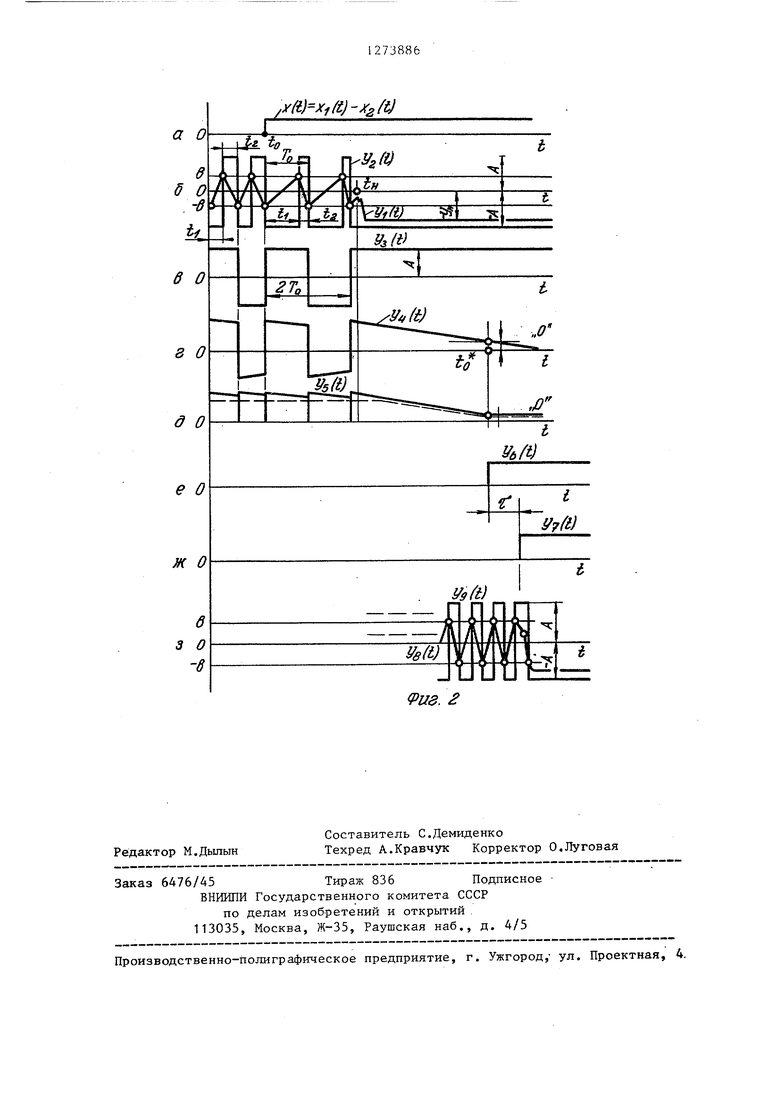
00 00 05 Изобретение относится к автоматическим системам управления и контрол и может использоваться в объектах технологической автоматики. Цель изобретения - увеличение чис ла контролируемых блоков системы управления электроприводо. Сущность изобретения состоит в том, что с Помощьюэлектрических цепей получают дополнительные диагностические данные и создают контур отключения напряжения питания вьшедшег из строя узла системы управления электроприводом. На фиг,1 представлена блок-схема предлагаемого устройства, на фиг.2 диаграммаУстройство содержит блок 1 задани управляющего сигнала первый 2 и вто рой 3 ключи, усилитель 4, делители частоты 5 -54 , первые пропорционально дифференд1гоующие элементы , первые демодулятор) 7 , элемент И,ПИ-НЕ 8, элемент 9 задержки, узел 10задания питающего напряженияj бло 11питакрш и блок 12 индикациио Узел 10 задания питающего напряж ния В1 ;лнг :ает блок 13 суммирования, блок 14 1):нтегр1-грования, формировател 15 ИМПУЛЬСОВ; второй пропоридонально дифференцирующий элемент 16, второй 17 п третий 18 демодуляторы и элемент И 19,. , контроля состоит из регулятора 20 скорости регулятора 21 то ка, датчика 22 тока и датчика 23 ско ростк, каждый.из которых выполнен в виде огшрациояного усилителяj включа ющего сумматор 24-27,, ;интегратор 28313 формирователь импульсов и . демодулирующнй фильтр 36-39, а также из исполнительного двигателя 40, Устройство работает следующим- образом. Делитель 5 частоты, элемент 6 и демодулятор 7 образзпот канал диагностщзования неисправности системы управления. Работа всех четьфех канало аналогична, Далитель 5 частоты формирует сигнал Tj-ma меандр со среднш нулевым значением и с периодом 2Тд (фиг,26) Элемент 6 имеющий передаточную функ цию вида W(p) Тр/(Тр 1)-, осущест вдает разделение входной цепи демодулятора 7 по постояниому току. Пара метры элемента 5 выбираются таким об разом, чтобы передать переменную сос тавляющую выходного сигнала y(t) делителя 5 частоты (фиг.2&) практически без искажений (фиг.) . В демодуляторе 7 выходнью импульсы VgCt) элемента 6 выпрямляются (фиг.2а) и при необходимости дополнительно фильтруются (фиг.2, пунктир), например, с помощью пассивного апериодического КС-фильтра первого порядка. Таким образом.формируется сигнал 1, свидетельствующий о работоспособности соответствующего регулятора электропривода. При наличии сигнала 1 на выходе демодуляторов выходной сигнал элементов 8 и 9 равен нулю. Блоки 13, 14 и 15 в совокупности образуют автоколебательную систему. При нулевом уровне сигнала на выходе блока 9 выходное напряжение у (t) формирователя 15 (фиг.2) представляет собой сигнал типа меандр со средним нулевым значением. Элемент 16 выполняет функции, аналогичные функдиям элементов 6(-б4. С помощью демодуляторов 17 и 18 формируется постоянное напряжение отрицательного и положительного знаков соответственно, которое служит для питания регуляторов электропривода. При наличии на выходе элемента 17 и сигнала1 на вькоде элемента 18 выходнала10 равно 1. ,ное напряжение узла 10 равно В этом случае на входах элемента 8 присутствуют сигналы 1 и выходное напряжение элементов 8 и 9 соответствует нулевому уровню. Ключ 3 находится в исходном замкнутом состоянии, и вход усилителя 4 подт1ючен к выходу системы управления В момент времени t (фиг.2&3, когда интегратор регулятора скорости оказался неработоспособным, его выходной сигнал принял максимальное зназначение у определяемое зоной насыщения микросхемы интегратора 28. Отсутствие режима автоколебаний в регуляторе скорости переводит делитель 5 частоты в статическое состояние, например + А (фиг.2&). Элемент 64 исключает прохождение постоянного сигнала на вход демодулятора 7, поэтому в момент времени t напряжение на.выходе элементов 64 достигает уровня О (фигЛг,), а на выходе элемента 8 появляется сигнал 1 (фиг.2k), Ключ 2 переходит в разомкнутое состояние, отключая вход усилителя 4 от выхода неработоспособной системы управления электроприводом.
С задержкой Т сигнал 1 формируется на выходе элемента 9 (фиг.2ж). Амплитуда 1 выбирается таким образом, чтобы она превышала величину допустимого входного сигнала каскада блоков 13, 14 и 15. При выполне-нии данного условия происходит срыв режима автоколебаний (фиг.2г) элемент 16 переходит в статическое состояние, а напряжение на выходе элемента 16 и демодуляторов 17 и 18 уменьшается до нуля. Это приводит к формированию на выходе элемента 19 сигнала О, за счет которого дублируется команда на переход ключа 2 в разомкнутое состояние. Кроме того, при срыве автоколебаний напряжение питания регуляторов электропривода уменьшается до нуля, что обеспечивает нулевой уровень напряжений на их выходе. Тем самым повышается надежность устройства в целом при возникновении в нем неисправности.
Аналогичным образом устройство работает при неработоспособности каких-либо других элементов.
Процесс поиска неисправности в системе управления заключается в следующем .
При отключении выхойа регулятора тока от усилителя 4 индикаторы блока 12 переходят в рабочее состояние. Для локализации места неисправности ключ 3 переводится вручную в разомкнутое Состояние. При этом каскад блоков 13, 1Д и 15 вновь входит в режим автоколебаний, формируя тем самым напряжение питания микросхем системы управления. По свечению индикатора неисправного тракта определяется неработоспособный функциональный узел, который заменяется исправным. Таким образом повышается ремонтопригодность электропривода и исключается режим поиска его неисправности по методу проб и ошибок.
При неисправности в узле 10 на одном из „входов элемента 19 формируется сигнал О, что приводит к появлению сигнала 1 на выходе элемента 8 и переводу ключа 2 в разомкнутое состояние. При поиске неисправности, который осуществляется посредством выключения контактов ключа, индикаторы блока 12 не переходят в нерабочее состояние, что говорит о неисправности элементов узла 10, который подлежит замене.
Выход из строя блока 11 приводит к обесточиванию элементов системы управления, что исключает появление световой индикации в блоке 12. Защита системы диагностирования оказывается неработоспособной при переходе формирователя 35 в неуправляемое нулевое по выходу состояние. Если в нулевое неуправляемое состояние перешел блок
9, то защита сработает за-счет размыкания ключа 2.
Когда элемент 19 находится в неисправном состоянии и его выходной сигнал равен нулю, работоспособность системы фактически не контролируется. Однако при неисправности узла 10 оказывается невозможным режим автоколебаний в каналах регулирования, что приводит к формированию сигнала О на выходе демодуляторов и переводу ключа 2 в разомкнутое сое- тояние.
Таким образом, практически любая неисправность в схеме электропривода приведет к отключению выхода системы управления им от входа усилителя 4 и к диагностике этой неисправности.
Формула изобретения
f
Устройство для контроля системы управления электроприводом, содержащее элемент ИЛИ-НЕ, блок задания управляющего сигнала, подключенный к входу объекта контроля, выход которого соединен с информационным входом первого ключа, связанного выходом через усилитель с входом исполнительного двигателя, и четыре канала диагностирования неисправности, каждьш из которых содержит последовательно соединенные делитель частоты, первый про- порционально-дифференцирующий элемент и демодулятор, выходом соединенный .с соответствующим входом блока индикации и с соответствующим входом элемента ИЛИ-НЕ, выход которого подключен к управляющему входу первого ключа и является блокирующим выходом устройства, вход каждого делителя частоты является информационным входом устройства, отличающееся тем, что, с целью увеличения числа контролируемых блоков системы управления электроприводом, устройство содержит элемент задержки, второй ключ, блок, суммирования, блок интегрирования, формирователь импульсов и второй пропорционально-диф4зеренцирующий элемент, второй и третий демодуляторы и элемент И, выходом соединенный с пятым входом блока индикации и с пятым входом элемента ИЛИ-НЕ, выход которого соединен через последовательно соединенные элемент задержки, второй ключ, блок суммирования, блок интегрирования, формирователь импульсов Т2 86 и второй пропорционально-дифференцирующий элемент с входом второго и входом третьего демодуляторов, выход каждого из которых подключен к соответствующему входу элемента И и соответствующим входам питания системы управления, входы питания блока интегрирования и формирователя импульсов связаны с выходами блока питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
| Система управления | 1984 |
|
SU1211688A1 |
| Развертывающий операционный усилитель | 1983 |
|
SU1091178A1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР | 2014 |
|
RU2546084C1 |
| Устройство для импульсно-фазового управления преобразователем | 1984 |
|
SU1244768A1 |
| УСТРОЙСТВО ДЛЯ ПОТЕНЦИАЛЬНОГО РАЗДЕЛЕНИЯ ЦЕПЕЙ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2469392C1 |
| Устройство для управления вентильным преобразователем | 1983 |
|
SU1094129A1 |
| Система автоматического управления | 1980 |
|
SU1008697A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ С ПАРАЛЛЕЛЬНЫМИ КАНАЛАМИ РЕГУЛИРОВАНИЯ | 2014 |
|
RU2565598C1 |
| Программируемый преобразователь напряжения произвольной формы в напряжение требуемой формы | 1990 |
|
SU1711303A1 |
Изобретение относится к автоматическим системам управления и контроля и может использоваться в объектах технологической аатгоматики. Цель изобретения - увеличение числа контролируемых блоков системы управления электроприводом - достигается получением дополнительных диагностических данных с помощью введенных электрических цепей, а также созданием контура отключения питающего напряжения вышедшего из строя узла системы управления электроприводом. Устройство снабжено средствами индикации всей совокупности возможных неисправностей с S и каждой неисправности отдельно. 2 ил. (Л
2} ЗД-/1Я
-, jf J-jA-JT -Jj l-зП7
ii
V.
-w ™
,(t)--X2ft
a 0
(Риг.
| Гарнов В.К | |||
| и др | |||
| Унифицированные системы автоуправления электроприводом в металлургии,- М.: Металлургия, 1977, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Система управления | 1979 |
|
SU842722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
