Изобретение относится к способам компенсации скоростной ошибки в системах стабилизации заданного положения подвижного объекта, содержащих датчи-к скорости, сигнал которого подается на корректирующий, элемент усилителя, управляющего исполнительным двигателем.
Предлагаемый способ отличается от известных тем, что датчик скорости устанавливают на отдельную поворотную на оси платформу, связанную с исполнительным двигателем через безлюфтовый редуктор с соответствующим передаточным числом. Применение такого способа позволяет исключить влияние скорости переносного движения на точность стабилизации.
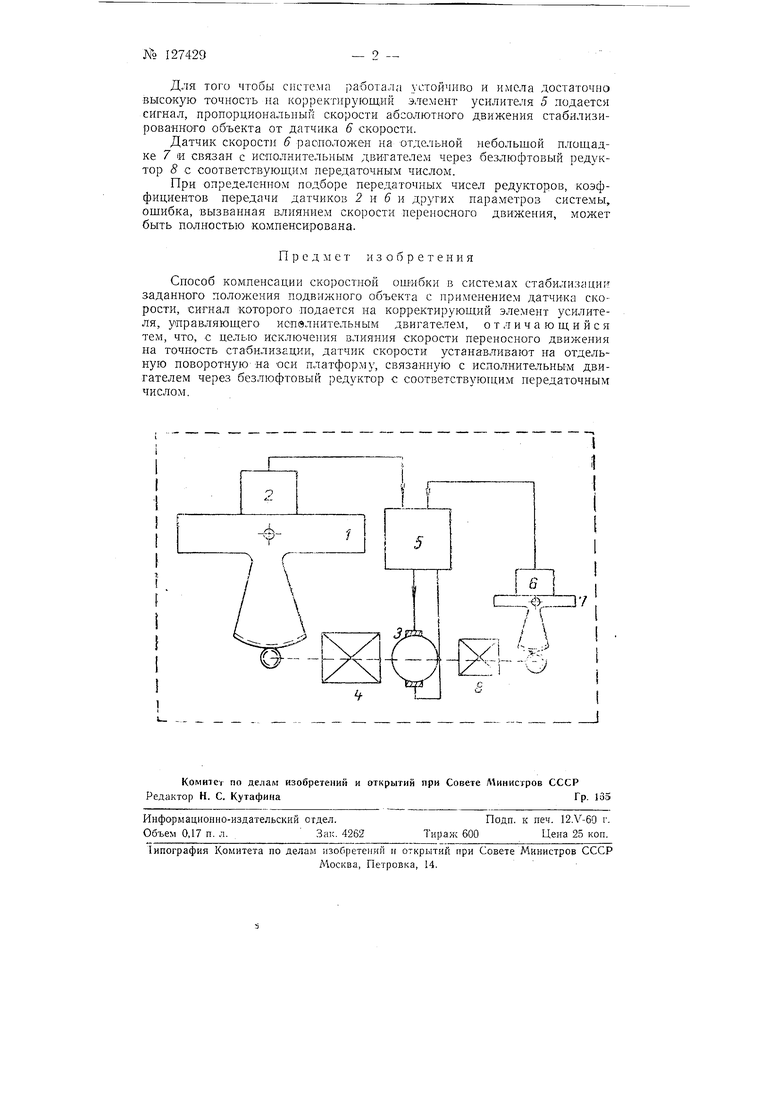
На чертеже изображена схема системы стабилизации, в которой скоростная ошибка компенсируется по предлагаемому способу.
Способ компенсации скоростной ошибки в системах стабилизации заданного положения подвижного объекта осуществляется с применением датчика скорости, сигнал которого подается в корректирующий элемент усилителя, управляющего исполнительным двигателем стабилизируемой платформы. Датчик скорости устанавливают на отдельную, поворотную «а оси площадку, связанную с исполнительным двигателем через приборный, безлюфтовый редуктор с соответствующим передаточным числом.
Система стабилизации подвижного объекта / содержит датчик 2 угла, в котором при отклонении объекта от горизонтального положения создается напряжение, пропорциональное этому отклонению. Полученный сигнал отрабатывается замкнутой системой автоматического регулирования, состоящей из исполнительного двигателя 3 и редуктора 4, в результате чего объект / удерживается в горизонтальном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СКОРОСТЯМИ И УГЛАМИ НАВЕДЕНИЯ АРТУСТАНОВКИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203470C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 1993 |
|
RU2118783C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| ПУЛЬТ, СИСТЕМА И СПОСОБ РУЧНОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) "АРЖЕСАН" | 1996 |
|
RU2128600C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2021 |
|
RU2781092C1 |
