Известно устройство для информации о ноложении нодвижного состава, содержащее бесконтактные индуктивные датчики и шунты, замыкающие магнитную цепь датчиков.
Онисываемое устройство по сравнению с известными дает возможность повысить точность информации о положении нодвижного состава. Это достигается тем, что шунты соединены с рельсами, а индуктивные датчики установлены на подвижном составе и соединены но схеме моста, одна из диагоналей которого подключена к входу фазочувствительного усилителя, управляющего релейной системой, включающей лампы накаливания, сигнализирующие о положении состава, и схемой подсчета пройденного пути.
Устройство предназначено, в частности, для информации точной установки, а также подхода передвижных мащин к заданному месту, например коксовых машин, выполняющих операцин по загрузке шихты в камеры коксования или выдачи кокса.
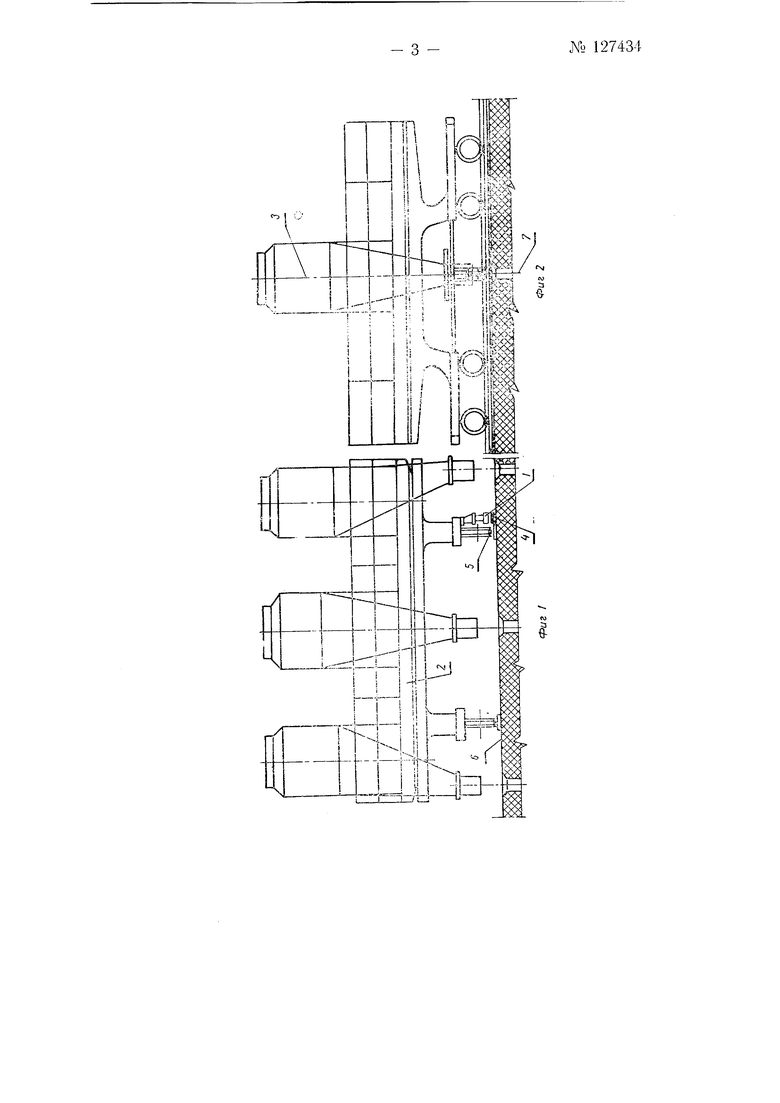
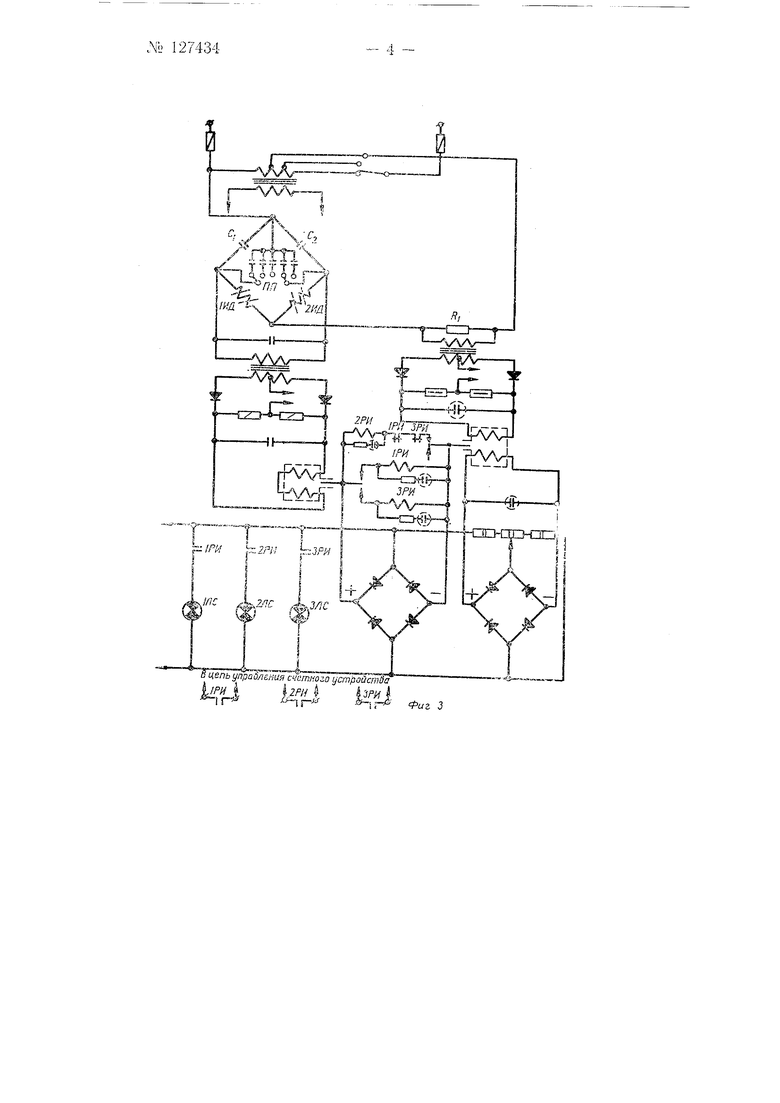
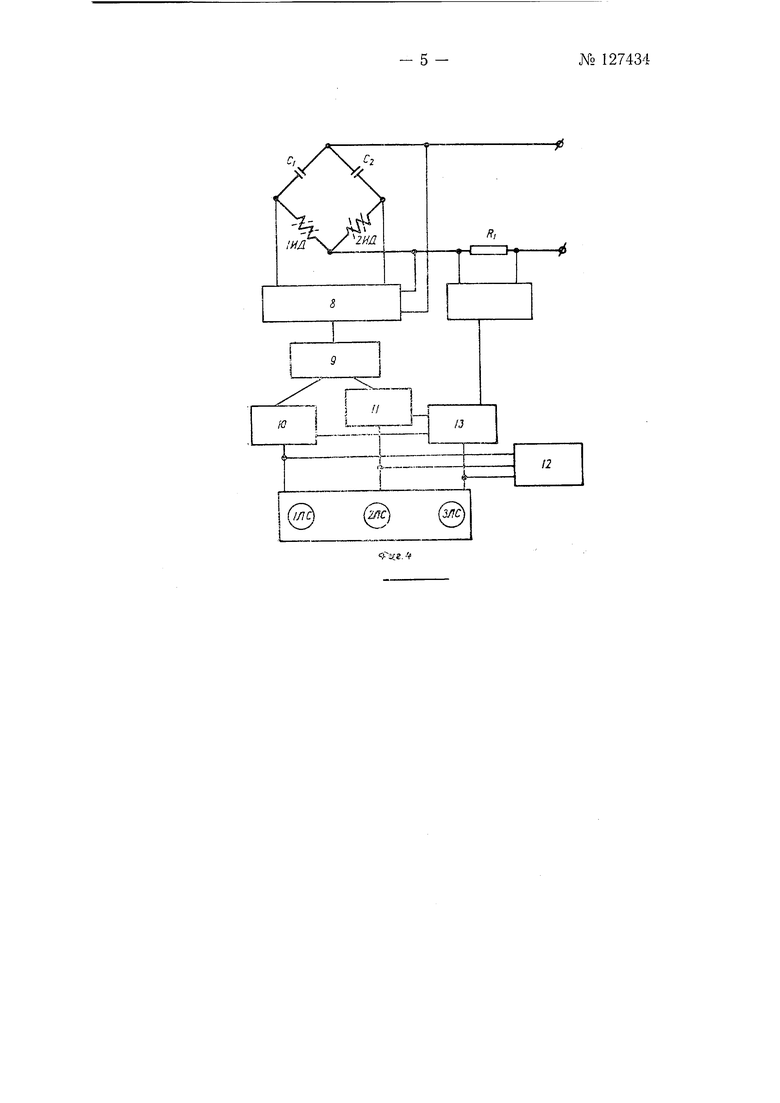
На фиг. 1 изображена схема установки устройства, например, на углезагрузочном вагоне (УВ), вид спереди; на фиг. 2 - схема установки того же устройства, вид сбоку; на фиг. 3-электрическая схема устройства; на фиг. 4 - блок-схема устройства.
Индуктивные датчики 1 монтированы на раме (портале) 2 углезагрузочного вагона (УВ) по оси бункеров 3, а шунты 4, замыкающие цепь датчиков, выполненные в виде стальных листов, прикреплены к рельсу 5 или заделаны в кладку 6 верха коксовой лечи по оси 7 камер коксования.
Принцип работы устройства.
№ 127434.- 2 При приближении к шунту одного из датчиков ШД или 2ИД, нарушается баланс моста датчиков. Напряжение разбаланса подается на фазочувствительный выпрямитель 8. Так как угол сдвига фаз между напряжением разбаланса и напряжением, питаюш,им мост датчиков, зависит от того, под каким из датчиков 1ИД или 2ИД находится шунт, то и на выходе фазочувствительного выпрямителя 8 имеется постоянное напряжение, полярность которого указывает местонахождецие шунта.
Поляризованное реле 9 включает исполнительное реле 10 (1РИ «вперед или исполнительное реле 11 (ЗРИ) «назад, контакты которых подключают соответствуюш,ие сигнальные лампы 1ЛС, 2ЛС, а также коммутируют цепи счетного устройства 12. Одновременно с нарушением баланса моста приближение датчика к шунту вызывает изменение тока, питающего мост, и, следовательно, нанряжения на сопротивлении 1.
Изменение напряжения на сопротивлении RI усиливается с помощью фазочувствительной схемы и подается на исполнительное реле 13 (2РИ) точной установки, которое благодаря электрической блокировке может срабатывать только в том случае, если отключены исполнительные реле 10 и //.
В свою очередь, это возможно только в том случае, если шунт находится посредине между датчиками 1ИД и 2ИД. Разбаланс моста np;i этом отсутствует, т. к. шунт в разной степени влияет на оба датчика, и иснолнительные реле «вперед и «назад отключены.
Напряжение на сопротивлении Ri отлично от исходного (без шунта), так как шунт влияет на оба датчика одновременно, и исполнительное реле 13 точной установки срабатывает.
Точность сигнализации установки и зона чувствительности описываемого устройства могут регулироваться следующими способами: изменением расстояния .между датчиками и шунтом; изменением размеров шунта; изменением расположения самих датчиков.
Для новышения чувствительности устройства применена резонансная мостовая схема (см. фиг. 4).
Величина емкостей Ci и Cz выбирается такой, чтобы резонанс з цепи Ci-1ИД или в цепи Cj-2ИД наступал при приближении шунта к соответствующему датчику. В соответствии с этим напряжение на сопротивлении RI при приближении шунтов возрастает.
Электрическая блокировка включения исполнительного реле 2РИ точной установки осуществляется нормально закрытыми контактами исполнительных реле 1РИ и ЗРИ.
Для сигнализации точной установки служит лампа 2ЛС, а для сигнализации отклонений служат лампы 1ЛС и ЗЛС, включаемые контактами исполнительных реле 2РИ, 1РИ и ЗРИ соответственно. Схема питается стабилизированным напряжением.
Предмет изобретения
Устройство для информации о положении подвижного состава, содержащее бесконтактные индуктивные датчики и шунты, замыкающие магнитную цепь датчиков, отличающееся тем, что, с целью повышения точности его работы, шунты соединены с рельсами, а индуктивные датчики установлены на подвижном составе и соединены по схеме моста, одна из диагоналей которого подключена к входу фазочувствительного усилителя, управляющего релейной системой, включающей лампы накаливания, сигнализирующие о положении состава, и схемой подсчета пройденного пути.
,
ЛП I П I
ii ij Wi
I; fiit-yf-v
I 1 гмщ M liilr
p I
лА
IЛА/V-I
iT.
CfnpoucmSa I
Й(--1 -:й
/W
0ыг 3
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ КОКСОВЫХ МАШИН ОТНОСИТЕЛЬНО оси МЕСТА ОСТАНОВКИ | 1973 |
|
SU368637A1 |
| Устройство для информации о положении подвижного объекта | 1977 |
|
SU746684A1 |
| Устройство для определения и индикации положения подвижного объекта | 1981 |
|
SU999083A1 |
| Устройство для определения и индикации положения подвижного объекта | 1975 |
|
SU521592A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПОКРЫТИЙ В ВАКУУМЕ, УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПОКРЫТИЙ В ВАКУУМЕ, СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВА ДЛЯ ПОЛУЧЕНИЯ ПОКРЫТИЙ В ВАКУУМЕ | 1989 |
|
RU2176681C2 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ ЗЕМНОЙ КОРЫ С ИСПОЛЬЗОВАНИЕМ НОРМИРОВАННЫХ ИСТОЧНИКОВ ПОЛЯ | 1996 |
|
RU2093863C1 |