1
Изобретение относится к коксохимическому машиностроению, в частности к вагонам для загрузки коксовых печей угольной шихтой.
Известные вагоны для загрузки коксовых печей угольной шихт1ной содержат корпус, механизмы для набора шихты ;из бункеров угольной баинги, транспортировки шихты к коксовой печи и загрузки шихты в печь. Недостаток этих устройств заключается в том, что они сложны, не обеспечивают высокой эффективности, унрош,ения эксплуатации и повышения точности работы.
Цель изобретения - упростить управление, эксплуатацию вагона, а также повысить точность работы.
Отлич:ие предлагаемого устройства заключается в том, что оно содержит взаимосвязанные автономные программные узлы, регулирующие работу группы механизмов по набору шихты в бункеры вагоиа, транспортированию шихты к печи, загрузке шихты в печь и обслуживанию стояков, программный узел очередности обслуживания коксовых печей и затворов угольной башни и корректировочные узлы.
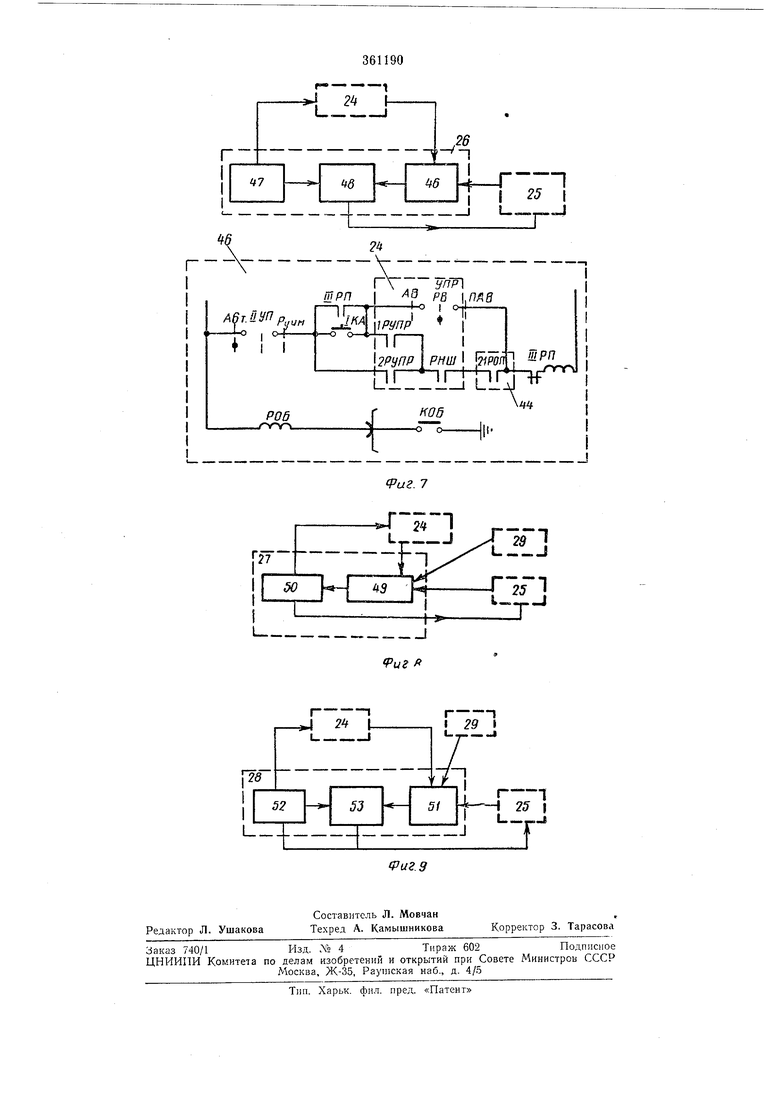
На фиг, 1 изображен предлагаемый вагон для загрузки коксовых печей, общий вид; на фиг. 2 - то же, плаН; на фиг. 3 - блок-схема программного устройства очередности обслуживания коксовых печей и затворов угольпой башни; на фиг. 4 - блок-схема автономного программного устройства управления
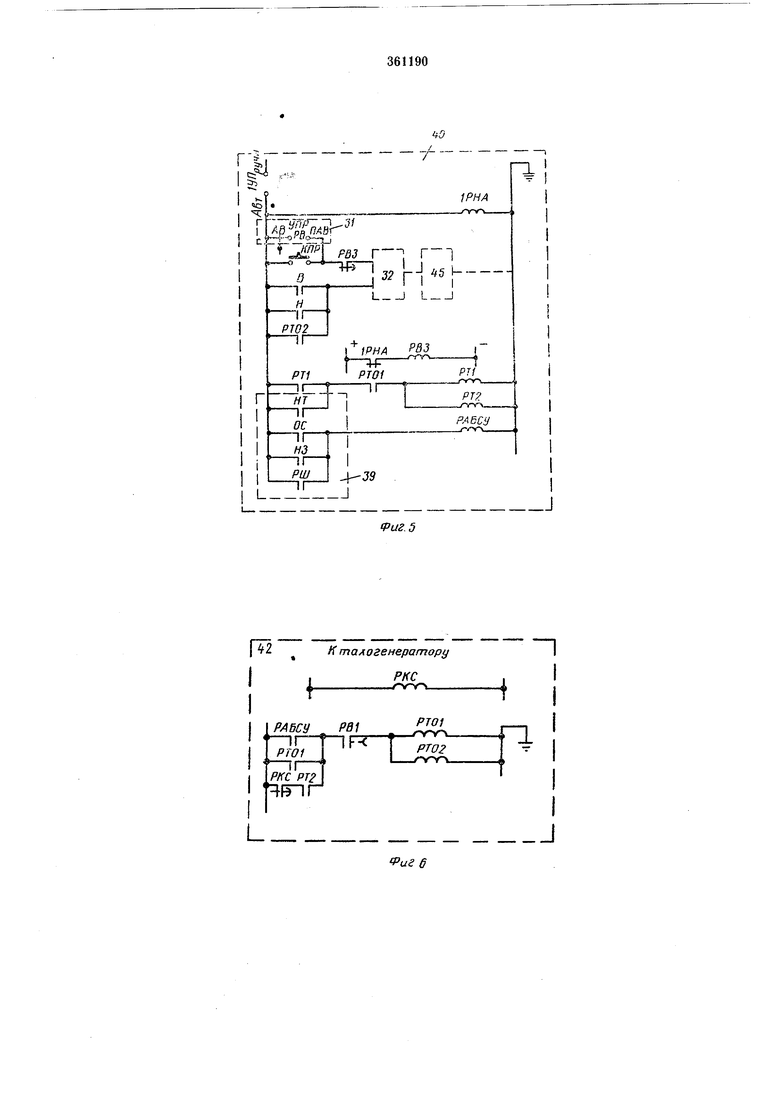
группой механизмов передвижения вагона; на фиг. 5 - схема блока реализации команд; на фиг. 6 - схема блока формирования «ползучей скорости; на фиг. 7 - схема автономного программного устройства набора шихты
в бункеры вагона из бункеров угольной бан1нП; на фиг. 8 - автономное программное устройство обслуживания стояков; на фиг. 9 - автоном Чое программное устройство загрузки коксовых печей шихтой.
Вагон для загрузки коксовых печей (см. фиг. 1 и 2) имеет портальную металлоконструкцию /, па которой установлены бункера 2 для угольной шихты, загружаемой в печь,
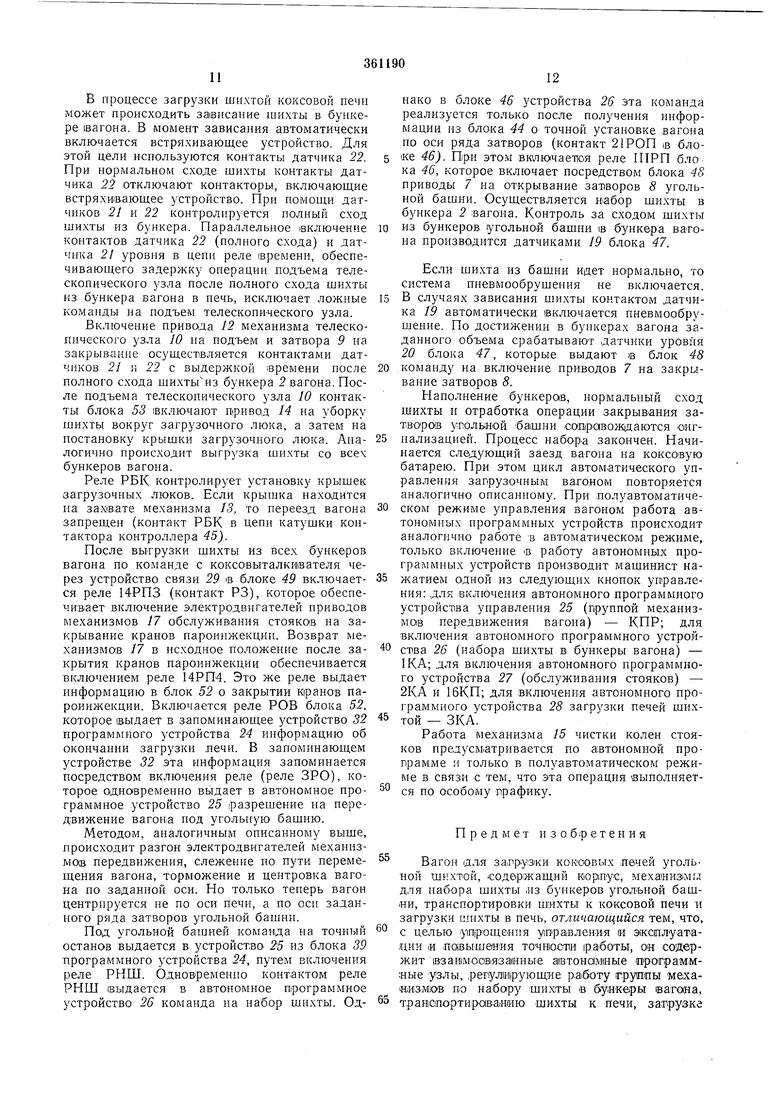
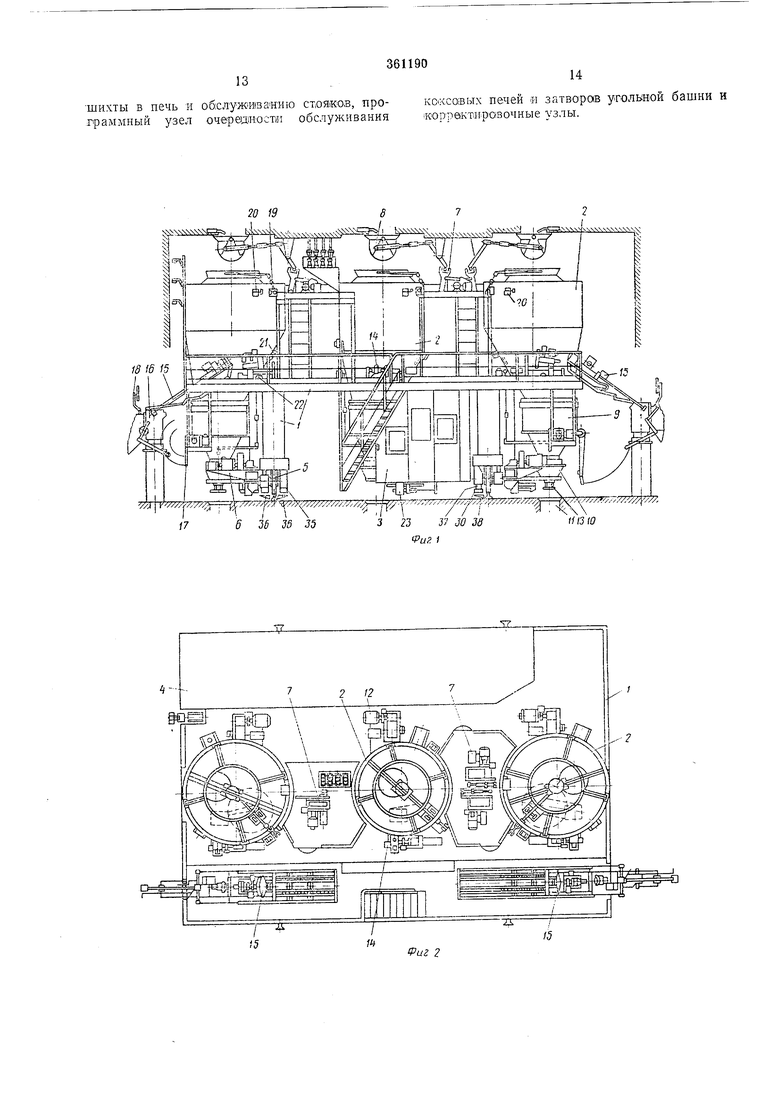
кабину 3 машиииста с пультами управления и кабину 4 с размещенными в ней панелями электропусковой аппаратуры и программными устройствами. Металлоконструкция опирается на четыре ходовые тележки 5 с пр:иводами 6 (меха1низмы передвижений, вагона). Каждый бункер вагона имеет в верхней части привод 7 для открывания затворов 8 угольной банит, а в пижпей части - секторпый затвор Я размещенный в кожухе, и телескопический узел 10 для направления потока шихты в люк // печи. Приводы 12 для открывания затворов 9 установлены на рабочей площадке машины. Каждый бункер, кроме того, имеет .ме.ханизм 13 для съема и установки крышек загрузочных люков коксовых печей. Приводы 14 механизмов для съема крышек загрузочных люков смонтированы на рабочей площадке вагона. Вагон снабжен двумя механизмами 15 для чистки колен стояков 16 и механизмами 17 для открывания крышек 18 и клапанов гндрозатворав стояков 16. На бункерах вагона разГг ещены датчики 19 контроля за сходом шихты из угольной башни, датчики 20 контроля наполнения бункеров углевагона, датчики 21 и 22 контроля схода шихты из бункеров 2 вагона в коксовую печь и датчики 2.3 контроля снятой крышки люка. Кроме того, имеются средства для блокировки механизмов, обеспечи1вающие безопасность работ и предохраняющие механизмы от поломок. Управление работой вагона в целом и его механизмами в автоматическом режиме, в соответствии с заданной программой загрузки коксовых печей, осуществляется (см. фиг. 3) лосре|Дством программного устройства 24 очередности обслуживания коксовых печей и затворов угольной башни, автономного программного устройст1ва 25 управления группой мехапизмов передвижения вагона, автономного программного устройства 26 набора шихты в бункера вагона из бункеров угольной башни, автономного программного устройства 27 обслуживания стояков, автономного программного устройства 28 загрузки коксовых печей шихтой, устройства 29 связи с коксовыталкивателем и устройства 30 контроля установки вагона по оси. Программное устройство 24 содержит узел 31 включения программного устройства 24, запоминающее устройство 32, задатчик 33, счетчик 34, датчик 35 грубого счета меток 36, датчик 37 точного счета меток 38 и блок 39 управления автономными программными устройствами 25, 26, 27 и 28. Узел 31 состоит из переключателя (УПР), кнопок для изменения задания в задатчике 33и реле для размножения контактов переключателя (1РУПР, 2РУПР). Запоминающее устройство 32 представляет собой группу реле (1РО, 2РО, ЗРО), осуществляющих запоминание выполнения технологических операций по набрру шихты в бункера вагона, обслужи1ванию стояков и выгрузки щихты в камеру коксовой печи. Задатчик 33 и счетчик 34(выполпены на базе счетно-шаговых реле (типа Е526), ламели которых включены так, что образуют цепи совладения. В качестве датчиков 35 и 37 используются индуктивные датчики, импульсно-связанные со счетчиком 34. В качестве меток 36 и 38 используют стальные шунты, размещенные по осям рядов затворов угольной башни и осям коксовы.к печей. Блок управления 39 представляет собой группу реле (РНШ, ОС, НЗ, НТ), при помощи контактов которых осуществляется выдача команд в автономные программные устройства 25, 26, 27 и 28. Автономное программное устройство 25 для управления группой электродвигателей приводов 6 передвижения вагона (см. фиг. 4) состоит из следующих функциональных блоков: блока 40 реализации команд, поступающих из программного устройства 24 очередности обслуживания коксовых печей; блока 41управления главным замедлением, блока 42формирования «ползучей скорости, блока 43автоматической установки вагона по оси обсл)живаемой печи или ряда затворов угольной бащни, блока 44 информации о выполнении операции и связи с другими программными устройствами, а также включает магнитные контроллеры 45 управления приводами 6 вагона. В блок 40 реализации команд из программного устройства 25 поступают три команды; «начало движения, «главное замедление, «точный останов. БлоЕ 40 реализации команд (см. фиг. 5) содержит реле IPHA, РВЗ, РТ1, РТ2 и РАБСУ, ключ 1УП и кнопку управления КПР. Ключ 1УП служит для выбор а режима работы автономного программного устройства 25. Кнопка КПР предназначена для включения в работу автономного программного устройства 25 при полуавтоматическом режиме управления (вагоном. Реле 1РНА включается в автоматическом режиме управления, когда еагоя ГОТО/В к передвижению. Реле РВЗ служит для создания выдержки времени на включение передвижения вагона. Реле РТ1 к РТ2 срабатывают при поступлении команды «главное замедление и включают блок 41 управления главным замедлением и магнитные контроллеры 45. Реле РАБСУ срабатывает при поступлении команды «точный останов и включает блок 42 формирования «ползучей скорости и блок 43. Блок 41 упраВления главным замедлением управляет динамическим торможением вагона и состоит из выпрямителя В, выполненного на К1ремниевых диоухах, включенных по схеме Ларионова, магнитного усилителя МУ, тахогенератора ТГ, потенциометрического задатчика закона торможения ПДТ, реле времени РВ2 и контакторов для коммутации силовых цепей динамического торможения 1ДТ, 2ДТ, ЗДТ, 4ДТ и 5ДТ. Потенциометрический задатчик ПДТ выполнен на базе реле типа Е526, которое управляет потенциометром ПТ. Надряжение с потенциометра ПТ, изменяющееся по закону заданного режима торможения, подается на обмотку управления МУ-ОУ1. Нагаряжение с тахогенератора ТГ, изменяющееся пропорционально скорости передвижения вагона, подается на обмотку упра)вления МУ-ОУ2. На ОУЗ подается необходимое напряжение смещения. Напряжение, подаваемое на ОУ4, обеспечивает характеристики динамического торможения при сопротивлениях в роторных цепях электродвигателей, равных ff 0,2 и /-1.. 0,4 (Б относительных единицах).
Блок 41 главного замедления управляет магнитными контроллерами 45 и обеспечивает снижение скорости вагона до заданной величины «ползучей скорости при постоянной величине тормозного пути независимо от внешних условий (изменение загрузки вагона, ветер и т. д.).
Блок 42 фо рмирования «ползучей скорости (см. фиг. 6) состоит из реле РКС, РТО1 и РТ02, которые выполняют переключение схемы магнитных контроллеров 45 таким образом, что труппа из четырех электродвигателей включается в двигательный режим на заданных механических характеристиках, а группа из четырех электродвигателей включается IB режим динамического торможения. Включение блока производится в функции пути, проходимого вагоном (реле РАБСУ), или в фуикции скорости (реле контроля скорости РКС) при снижении скорости до заданного предела.
Блок автоматической установки 43 состоит из реле РП1, РП2, РПЗ, 1РНВ, 2РНВ, 1РНН, 2РНН и РМТ.
Реле РП1, РП2 и РПЗ служат для размножения контактов 21РИ, 22РИ, 23РИ устройства 30 контроля установки вагона по оси и для включения механизмов передвижения при центровке. Реле 1РНВ, 2РНВ, 1РНН и 2РНН осуществляют запоминание направления передвижений вагона. Реле РМТ отключает контакторы IT и 2Т, управляющие тормозными элекрромаг.нита.ми, и, таким образом, фиксирует .вагон по оси наложения колодочных тормозов. Блок 43 автоматически устанавливает вагон по заданной оси с точностью ±25 мм. В том случае, если ватой с заданной точностью не установлен, блок 43 посредством магнитных контроллеров 45 включает электродвигатели на «ползучей скорости в направлении места установки до тех пор, пока не будет зафиксирована точная установка вагона по оси.
Блок 44 информ-ации состоит из реле 21РОП и РВ1, а также сигнальных табло.
Реле 21РОП включается с выдержкой , определяемой реле РВ1, и выдает информацию о точной установке вагона у заданного места в автономные программные устройства 26, 27, 28.
Автономное программное устройство 26 набора шихты в бункера вагона (см. фиг. 7) состоит из следующих функциональных блоков: блока 46 реализации команд и информации по набору шихты, поступаюпхих из программного устройства 24 очередности обслуживания коксовых печей и автономного программного устройства 25 управления группой механизмов передвижения вагона; блока 47 контроля выполнения операций по набору шихты в бункера вагона и передачи информации о выполнении IB программное устройство 24; блока 48 управле 1ия электродвигателями приводов и устройствами, .выполняющими операции по набору шихты в бункера вагона.
Блок 46 реализации команд и информации содержит реле ШРП и РОБ, кнопку IKA и ключ ПУП.
0
Ключ ПУП служит для выбора режима работы автономного программного устройства 26. Кнопка IKA предназначена для включения в работу автономного программного устройства 26 при полуавтоматическом режиме управления вагоном. Реле П1РП включает контакторы блока 48 управлення электродвигателями приводов 7 и устройства.ми, обеспечивающими выиолнение операций по набору шихты.
0
Реле РОБ срабатывает при полном сходе шихты из верхнего бункера подпланирной шихты и включ ает соответствующий контактор механизма на закрывание затвора бункера.
Блок 48 управления механизмами п устройствами набора шихты содержит контакторно-релейиые блоки защиты и управления электродвигателями приводов 7 устройств, обеспечивающих выполнение операций по набору П1ИХТЫ, и системой пневмообрушивания ших0ты В угольной башне. Блок 48 включает исполнительные механизмы приводов 7 и о беспечивает блокировочиую связь с механизмами иередвижения вагона.
Блок 7 контроля выполнения операций по
5 набору шихты (см. фиг. 7) содержит датчики 19 контроля за сходом шихты из угольной башни, датчики 20 контроля наполнения бункеров вагона, датчик КОБ контроля опорожнения верхнего бункера подпланирной шихты
0 и средства приема сигнала об опорожнении этого со стациопарного объекта (батареи) «а подвижный Объект (вагон).
Блок 47 обеспечивает контроль наполнения бункеров вагона шихтой, контроль нормаль5ного схода шихты из бункеров угольной башни, включение пневмообрушения ншхты в бункерах башни и передачу информации в блок 48 и программное устройство 24 о выполнении операций по набору шихты в бункера вагона.
0
Автономное программное устройство 27 обслуживания стояков (см. фиг. 8) состоит иг следующих функциональных блоков; блока 49 реализации команд и информации но обслуживанию стояков, поступающих из пропрамм5иого устройства 24, автонод ного программного устройства 25 и устройства связи 29, блока 50 управлення электродвигателями приводов механизмов 17 по обслуживанию стояков 16.
Блок 49 реализации команд и информанин
0 содержит реле 14РП1, 14РП2, 14РПЗ. ИРП4, кнопки 2КА, 16КП и ключи 14УП и 15УП. Ключи 14УП и 15УП служат для выбора режима работы автономного программного устройства 27. Кнопки 2КА и 16КП предназна5
чены для .включения IB работу автономного программного устройства 27 приполуавтоматическом релсиме управления вагоном. Реле 14РП1 включает контакторы блока управления 50 электродвигателя приводов механизмов 17 обслуживания стояков на выполнение технологической операции открывания стояков. Реле 14РП2 срабатывает по команде из автономного программного устройства 28 (контакт РАПЛ) - «закрыть стояк и открыть краны пароинжекции. Реле 14РПЗ срабатывает по команде с коксовыталкивателя (контакт РЗ) «закрыть краны пароинжекции (щ автоматическом режиме). Реле 14РП4 срабатывает при включении приводов механизмов 17 для хода IB крайнее положение (исходное) после закрывания крано в пароинжекдии.
Блок 50 управления электродвигателями приводов механизмов 17 по обслуживанию стоякав содержит ко:нта1кторно-1релейные блоки защиты и управления электродвигателями приводов механизмов 17, обеспечивающих выполнение технологических операций. Блок 50 включает электродвигатели лриводогв механизмов 17 и обеспечивает блокировочную связь с механизмами передвижения вагона.
Автономное программное устройство 28 загрузки коксовых печей шихтой (см. фиг. 9) состоит из следующих функциональных блоков: блока 51 реализации команд и информации по загрузке коксовых печей шихтой, поступающих из программного устройства 24, автономного программного устройства 25 и устройства связи 29; блока 52 контроля выполнения операций по загрузке шихтой коксовых печей и передачи информ ации о выполнении загрузки в запоминающее устройство 32 программного ycTipoficTsa 24; блока 53 управления электродвигателями нриводов 12 и 14 и устройст1вами, выполняющими операции по загрузке шихтой коксовых печей.
Блок 51 реализации команд информации содержит реле РАУ, РВУ, РРК, РВ, РАПЛ, кнопку ЗКА и ключ 8УП. Ключ 8УП служит для выбора режима работы автономного программного устройства 28. Кнопка ЗКА предназначена для включения в работу устройства
28при полуавтоматическом режиме управления вагоном. Реле РБУ разрещает реализовать ком1анды по выгрузке шихты только после получения информации об остановке вагона по заданной оси. Реле РАУ, РВ и РАПЛ служат для подачи импульса на включение контакторов блока 53 управления электродвигателями приводов 12 и 14. Реле РРК служит для размножения контакта устройства связи
29с коксовыталкивателем.
Блок 55 управления механизмами и устройствами, обеспечивающими загрузку шихты в коксовую печь, содержит коптакторно-релейные блоки защиты и управления электродвигателями приводов 12 и 14 и устройствами, обеспечивающими выполнение технологических операций по загрузке шихтой коксовых печей.
Блок 53 (Включает электродвигатели приводов 12 и 14 и обеспечивает блокировочную связь с механизмами передвижения вагона.
Блок 52 контроля выполнения операции по
загрузке шихтой коксовых печей содержит реле РОВ, Р, РБК, РСК, датчик 23 контроля снятой крышки люк.а и датчики 21 и 22 контроля схода шихты из бункера вагона. Датчик 23 осуществляет контроль снятия крышки лю ка. Его исполнительное реле Р своими контактами включает реле РСК, которое выдает разрешение в блок 53 на отработку операции опускания телескоиического узла 10 и открывания затвора 9 бункера вагона, нодлежащего опорожнению. Реле РОВ служит для выдачи информации в программное устройство 24 об окончании загрузки печи. Реле РБК срабатывает тогда, когда все крышки загрузочных люков установлены. При этом посылается информация IB автономное нрограммное устройство 25, разрешающее передвижение вагона.
Вагон для загрузки коксовых печей шихтой в автоматическом режиме работает следующим образом.
После набора шихты в бункера вагона под угольной башней из блока 47 автономного программного устройства 26 в запоминающее устройство 32 программного устройства 24 поQ ступает информация об окончании набора. В устройстве 32 эта информация запоминается реле 1РО, которое своим контактом выдает команду в aBTOHOMF oe программное устройство 24 (блок 40) на начало передвижения вагона.
С выдержкой времепи реле РАЗ 1вклю.чаются контакторы направления магнитных контр-олларав 45, ооуществЛяютоя туак и разгон в функции времени всех восьми электродвигателей приводов 6 передвижения вагона. Во время нередвижения вагона по верху коксовой батареи программное уст1ройство 24 осуществляет слежение по пути перемещения вагона. Слежение ведется методом счета меток 36 и
5 38 (щунтов) счетчиком 34 посредством датчиков 55 и 57. Счет ведется в два этапа: сначала грубо, затем точно. Сначала считаются щунты 36, а затем - шунты 38. При отсчете счетчиком 34 числа шунтов, заданных задатчиком
0 55, между задатчиком 55 и счетчиком 34 образуется цепь совпадения. Это произойдет тогда, когда до места точной остановки останется расстояние, равное заданному пути торможения. В этот момент из блока 39 выдается
5 команда (контакт ПТ) на главное замедление. При этом включается реле РТ1 и РТ2 (блок 40) и своими контактами отключает контакторы 1ДТ и 2ДТ и включает контакторы ЗДТ и 4ДТ (блок 41). Электродвигатели приводов
0 6 отключаются от сети переменного тока и подключаются к сети постоянного тока. Осуществляется динамическое торможение. Для получения необходимых характеристик с выдержкой времени реле ускорения магнитных 65 контроллеров и реле РВ2 изменяются ротор9
ные сопротивления электродвигателей. Одновременно реле РТ1 и РТ2 блока 40 подключают обмотки управления МУ-ОУ1 к ПК, а ОУ2 к ТГ, шунтируют добавочное сопротивление ЗДС в цепи ОУ4 и включают задатчик закона динамического торможения.
Величина пути торможения УВ выдерживается, примерно, постоянной соответствующим изменением величины тока динамического торможения в зависимости от действительной скорости, которая сравнивается с заданной задатчиком в данный момент времени. Постоянная величина тормозного пути обеспечивает выход IB зону точного останова, которая контролируется автоматическим бесконтактным сигнальным устройством 30 типа АБСУ-1М.
Во время торможения вагона программное устройство .продолжает вести слежение по пути перемещения. В зоне заданной печи между задатчнком 33 и счетчиком 34 образуется вторая цепь совпадения. При этом включается реле ОС блока 39, которое выдает команду в блок 49 на открывание крышек стояков.
Одновременно контактом ОС включается реле РАБСУ блока 40, отключается реле РКС и включается реле РТО1 и РТО2 блока 42, которые с помощью контактора 2ДТ подключают группу из четырех электродвигателей к сети переменного тока, а вторая группа из четырех электродвигателей контактором 5ДТ подключится к сети постояиного тока. Скорость движения вагона определяется результирующей характеристикой от работы группы электродвигателей в двигательном режиме и группы электродвигателей в режиме динамического торможения. Вагон па «ползучей скорости движется к месту точного останова,
По достижении оси заданной печи устройство 30 включает реле РП2. Реле РМТ отключается. Отключаются и контакторы IT и 2Т тормозных электромагнитов и накладываются колодочные тормоза, фиксирующие вагон в заданном месте.
В случае, если остановка вагона в заданном месте не выполнена с точностью ±25 мм, контактами устройства 30 включаются (реле РП1 или РПЗ. Последние обеспечивают включение электродвигателей приводов 6. Вагон па «ползучей скорости движется в сторону точного останова.
Точная установка фиксируется реле РП2. При этом с выдержкой времени, определяемой реле РВ1, включается реле 21РОП блока 44, которое выдает информаиию об установке вагона по оси печи.
После включения реле 21РОП в блоке 49 автономного программного устройства 27 включается реле 14РП1, которое посредством блока 50 обеспечивает включение электродвигателей приводов механизмов 17 на открывание крышек 18 стояков 16.
После окончания процесса открывания крышек стояков из блока 50 устройства 27 в запоминающее устройство 32 программного уст10
ройства 24 поступает информация. В запоминающем устройст1ве 32 включается реле 2РО, запоминающее окончание открывания стояков.
При этом из запомипающего устройства 32 в блок 40 автономного программного устройства 25 выдается команда па начало передвижения вагона. С выдержкой времени реле РВЗ электродвигатели приводов 6 разгоняются IB функции времени. Вагон неремещается к печи, подлежащей загрузке.
Слежение по пути перемещеппя вагона программпое устройство 24 ведет методом, апалогичпым описанному выше. Когда до места точной остановки остается расстояние, равное заданному пути торможения, в программном устройстве 24 образуется цепь со-зпадепия и включается реле НТ. В блок 39 поступает команда на главное замедление. Осушествляется динамическое торможение. Вагон замедляется. Программное устройство 24 продолжает осуществлять слежение по пути перемещения вагона.
В зоне заданной печи включается реле НЗ
блока 39. При этом в автономное программное устройство 28 выдается команда на загрузку печи, а в автоиомное программное устройстзо 25 - команда на точный останов вагона. Методом, аналогичным онисанпоАгу выще, вагон
центруется по оси печи.
После точного останова вагона из блока 44 устройства 25 в блок 51 автономного программного устройства 28 поступает информация об установке вагона по оси (контакт
21РОП). При этом (В блоке 51 включается реле РБУ. подготавливающее цепь включения реле . Убедивщись, что вагон установлен по оси печи, подлежащей загрузке, мапипшст коксовыталкивателя через устройство 29 связи выдает в автономное программное устройство 28 разрешение на на-чало загрузки печи (контакт Р1). При этом в блоке 51 устройства 28 включается реле РРК. После этого включается реле РА.У, отключается реле времени
РВ, определяя выдержку времени включения реле РАПЛ, которое включает, в за.данной последовательности, контакторы электродвигателей приводов 12 и 14 для отработки операций по загрузке шихтой коксовой печи. Включается привод 14 механизма 13 и происходит снятие крышки люка.
Спятие крышки загрузочиого люка контролируется индуктивным датчиком 23. Когдо крышка люка снята - включается реле Р и
РСК. Реле РСК через блок 55 включает привод 12 механизма опускания телескопического узла 10 и открывания затвора 9. Одновременно с включением привода 14 механизма 13 происходит включение электродвигателей приводов механизмов 17 на закрывание стояков (контакт РАПЛ включает реле 14РП2 блока 49). При опушенном телескопическом узле 10 и открытом затворе 9 происходит свободный сход шихты из бункера 2 вагона в камеру коксовой печи.
И В процессе загрузки шихтой коксовой печи может происходить зависание шихты в буйкере вагона. В момент зависания автоматически включается встряхиваюш,ее устройство. Для этой цели используются контакты датчика 22. При нормальном сходе шихты контакты датчика 22 отключают контакторы, включающие встряхи1ваюш.ее устройство. При помощи датчиков 21 и 22 контролируется полный сход шихты из бункера. Параллельное включение контактов датчика 22 (полного схода) и датчика 21 уровня в цепи реле времени, обеспечивающего задержку операции подъема телескопического узла после полного схода шихть из бункера вагона в печь, исключает ложные команды на подъем телескоиического узла. Включение привода 12 механизма телескопического узла 10 на подъем и затвора 9 на закрывание осуществляется контактами датчиков 21 и 22 с выдержкой времени после полного схода щихтьГиз бункера 2 вагона. После подъема телескопического узла 10 контакты блока 53 включают цривод 14 на уборку шихты вокруг загрузочного люка, а затем на постановку крышки загрузочного люка. Аналогично происходит выгрузка шихты со всех бункеров вагона. Реле РБК контролирует установку крышек загрузочных люков. Если крышка находится па захвате механизма 13, то переезд вагона запрещен (контакт РБК в цепи катушки коптактора контроллера 45). После вЫГрузки шихты из всех бункеров вагона по команде с коксовыталкивателя через устройство связи 29 щ блоке 49 включается реле 14РПЗ (контакт РЗ), которое обеспечивает включение электродвигателей приводов механизмов 17 обслуживания стояков на закрывание кранов пароиижекции. Возврат механизмов 17 в исходное положение после закрытия кранов пароинжекции обеспечивается включением реле 14РП4. Это же реле выдает информацию в блок 52 о закрытии К|раноБ пароинжекции. Включается реле РОВ блока 52. которое выдает в запоминающее зстройство 32 программного устройства 24 информацию об окончании загрузки лечи. В запоминающем устройстве 32 эта информация запоминается посредством включения реле (реле ЗРО), которое одновременно выдает в автономное программное устройство 25 разрешение на передвижение вагона под угольную башню. Методом, аналогичным описанному выше, происходит разгон электродвигателей механизмов передвижепия, слежение по пути перемещения вагона, торможение и центровка вагона по заданпой оси. Но только теперь вагон центрируется не по оси печи, а по осп заданного ряда затворов угольной башни. Под угольной башней команда на точный останов выдается в устройство 25 из блока 39 программного устройства 24, путем включения реле РНШ. Одновременно контактом реле РНШ выдается в автономное программное устройство 26 команда на набор шихты. Од12нако в блоке 46 устройства 26 эта команда реализуется только после получения информации из блока 44 о точной установке вагона по оси ряда затворов (контакт 21РОП в блоке 46). При этом включаетюя реле ШРП бло ка 46, которое включает посредством блока 48 приводы 7 на открывание зат1воров 8 угольной башни. Осуществляется набор шихты в бункера 2 вагона. Контроль за сходом шихты из бункеров угольной башни IB бункера ватона производится датчиками 19 блока 47. Если шихта из башни идет нормально, то система пневмообрушепия не включается. В случаях зависания шихты контактом датчика 19 автоматически включается пневмообрушение. По достижении в бункерах вагона заданного объема срабатывают датчики уровня 20 блока 47, которые выдают в блок 48 команду на включение приводов 7 на закрывание затворов 8. Наполнение бункеров, нормальный сход щихты н отработка операции закрывания затворов у.польНОй башни .саправождаются сигнализацией. Процесс набора закончен. Начинается следующий заезд вагона на коксовую батарею. При этом цикл автом1атического управления загрузочным вагоном повторяется аналогично описанному. При полуавтоматическом режиме управления вагоном работа автономных программных устройств происходит аналогично работе в автоматическом режиме, только включение в работу автономпых программиых устройств производит машинист нажатием одной из следующих кнопок управления: для включения автономного программного устройст1ва управления 25 (группой механизмов передвижения вагона) - КПР; для включения автономного программного устройства 26 (набора шихты в бункеры вагона) - IKA; для включения автономного программного устройства 27 (обслуживания стояков) - 2КА и 16КП; для включения автономного программного устройства 28 загрузки печей шихтой - ЗКА. Работа механизма 15 чистки колен стояков предусм атривается по автономной пропрамме и только в полуавтоматическом режиме в связи с тем, что эта операция выполняется по особому лрафику. Предмет изобретения Вагон (ДЛЯ заррузки какоовых печей угольной щихтой, содержащий юорпус, мехамиэмгд для набора шихты ,из бункеров угольной баш«и, транспортировки шихты к коксовой печи и загрузки шихты в печь, отличающийся тем, что, с целью 1у|П|рощею1я управлени я и зксплуата)ции и п вышеиия точню:от1и работы, ои содержит |взаи1мо-ов;я:за(нные автонамиые программные узлы, регулирующие рЛ|боту группы меха«измов по набору шихты в бункеры вагона, трансиортирав-анию щихты к печи, загрузке
13 ШИХТЫ в печь и обслужнзаиию стояков, программный узел очерештостш обслуживания
14 кслсовых печей и затворов угольной башни и корректировочные узлы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММНОЕ УСТРОЙСТВО ОЧЕРЕДНОСТИ ОБСЛУЖИВАНИЯ КОКСОВЫХ ПЕЧЕЙ И ЗАТВОРОВ УГОЛЬНОЙ БАШНИ | 1972 |
|
SU360358A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1976 |
|
SU653285A2 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОГО НАБОРА ШИХТЫ | 1970 |
|
SU277714A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1976 |
|
SU691480A2 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1978 |
|
SU768758A2 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1983 |
|
SU1110795A2 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1981 |
|
SU998489A2 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1977 |
|
SU691481A2 |
| Программное устройство обслуживания коксовых печей и затворов угольной башни | 1980 |
|
SU887619A2 |
| Программное устройство очередностиОбСлужиВАНия КОКСОВыХ пЕчЕй и зАТВОРОВугОльНОй бАшНи | 1979 |
|
SU802352A1 |
П Г 30 I 25 II
Г
fcl
«o «
I 2 К талогенератору IIPKC
I
/
П1РНА
ipuz.S
П
I f-1
24
I 29 I
