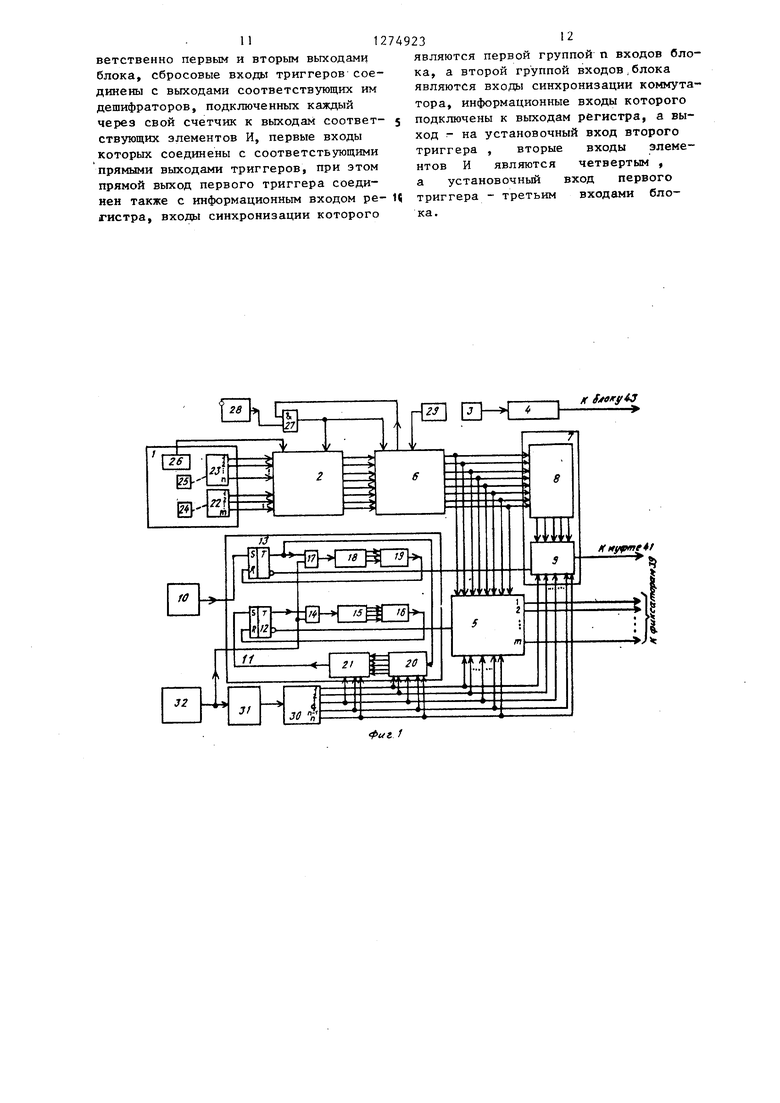
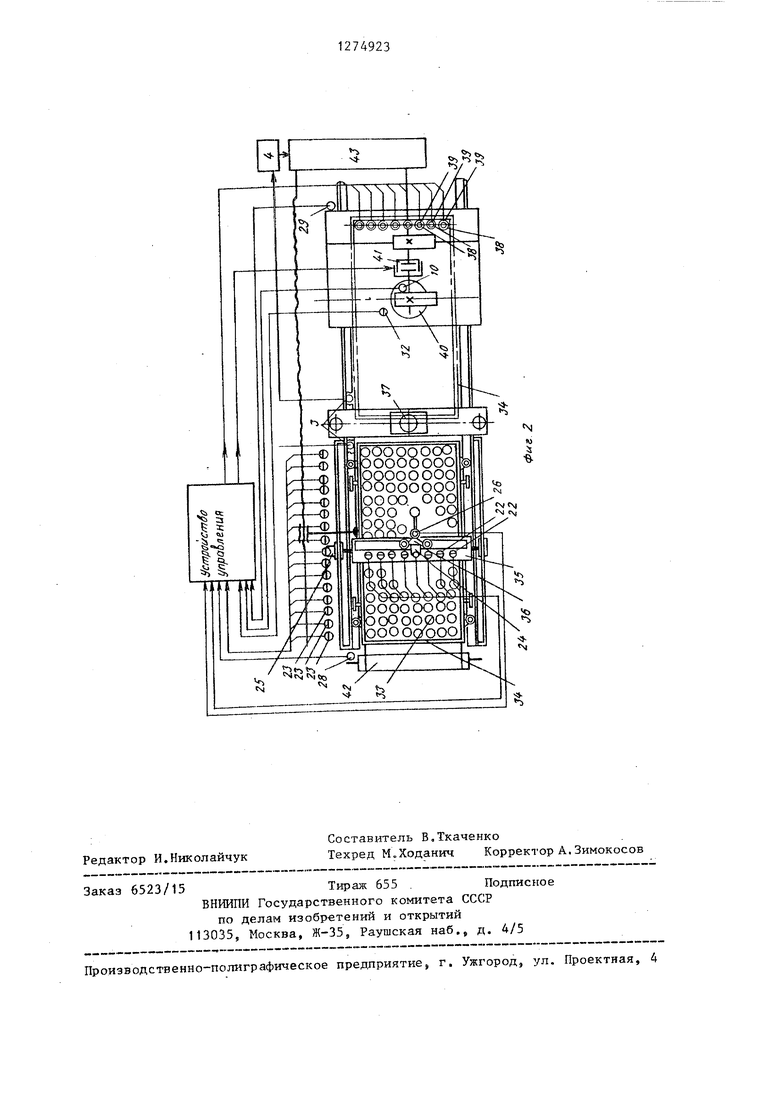
Изобретение относится к области управления технологическими процесса ми вырубки, . резки, штамповки изделий в частности вырубки плоских изделий из рулонных материалов. Целью изобретения является повыше ние производительности установки и сокращение технологически:-: отходов при вырубке путем автоматизации процесса. На фиг,1 приведена блок-схема уст ройства управления; на фиг,2 - установка контроля и вырубки, вид сверху Устройство содержит блок 1 преобразования входной информации, блок 2 запоминания информации, блок 3 датчи ков состояния установки, блок 4 управления приводом перемещения, блок 5 управления исполнительным механизмом, второй блок 6 запоминания инфор мации, второй блок 7 управления исполнительным механизмом, состоящий и шифратора 8 и блока 9 сравнения кодов, датчик 10 вырубки, блок 11 формирования блокировок, состоящий из первого 12 и второго 13 триггеров, первого злемента И 14, первого счетчика 15, первого дешифратора 16, вто рого элемента И 17, второго счетчика 18, второго дешифратора 19, регистра 20 и коммутатора 21, Блок 1 преобразования входной информации состоит из датчиков 22 мето координаты У, датчиков 23 меток координаты X, считывателей 24 и 25 меток и датчика 26 дефектов. Устройство, содержит также злемент И 27, датчик 28 окончания визитажа, датчик 29 окончания вырубки,дешифра тор 30, счетчик 31 и датчик 32 перемещения полотна. Установка контроля и вырубки сос/оит из визитажного стола 33, каретки 34, транспортирующей полотно на визитажный стол 33 и на позицию вырубки, кодировщика, состоящего из штанги 35 и дефектоотметчика 36, при чем на штанге 35 установлен считыватель 25 меток координаты X, а на дефектоотметчике 36 - считыватель 24 меток координаты У и датчик 26 дефекта. Установка содержит также гильотинный нож 37 для отделения по|1отна, закрепленного в каретке 34, от полотна, поданного на визитажный стол 33, первый исполнительный механизм в виде многопозиционного штам па, имеющего m пуансонов 38 с фикса13 торами 39, а также второй исполнительный механизм в виде штампа с пуансоном 40 большего диаметра и муфты 41управления, рулон 42 обрабатываемого полотна, привод 43 перемещения каретки 34 и пуансона 40. Установка работает следующим образом. Обрабатываемое полотно из рулона 42при первоначальной заправке вручную подается на визитажньй стол 33, на котором оно фиксируется, например, вакуум-схватами (не показаны). На визитажном столе 33 оператор визуально определяет дефекты материала в виде проколов, посторонних включений загрязнений любого цвета, складок и т.п. Перемещая кодировщик, оператор совмещает визир дефектоотметчика 36 с дефектным участком полотна и нажимает кнопку, связанную с датчиком 26 дефекта .(порядок перемещения кодировщика и его исходное положение безразличны). Вдоль длинного края визитажного стола 33 установлены п датчиков 23 меток координаты jX, а на штанге кодировщика - m дат- . чиков 22 меток координаты У. Дискретность отсчета каждой координаты определена с учетом минимального размера вырубаемой детали. При перемещении кодировщика под воздействием считывателей 24 и 25 срабатьгеают датчики 22 и 23 меток координат X и У, подключенные к шгформационным входам первого блока 2 запоминания информации. Запись информации, поступившей на вход блока 2 запоминания, происходит при срабатывании датчика 26 дефекта. После окончания визитажа участка полотна, закрепленного на визитажном столе 33, оператор нажимает кнопку Конец визитажа, являющуюся датчиком 28 окончания визитажа. При этом, если каретка 34 находится на позиции визитажа, что фиксируют датчики 3 состояния установки, вк.пючаются схваты каретки 34, фиксирующие полотно, отключаются схваты визитажного стола 33 и каретка 34 начинает поступательное движение, транспортируя полотно на позицию вырубки до линии пуансонов 38 и одновременно подавая новый участок полотна на визитажный стол 33 из рулона 42. Включение движения и позиционирование каретки 34 производятся стандартными регуляторами, входящими в состав блока 4 управления приводом перемещения. После точной остановки каретки 34 на позиции вырубки срабатывает гильотинный нож 37 и отсекает полотно, закрепленное в каретке 34,от полотна, поступившего на визитажный стол 33, после чего оператор может начинать визитаж нового участка полотна, а блок 4 управления приводом перемещения включает режим шаговой подачи каретки. В процессе вырубки блок 5 управления исполнительным механизмом включает или отключает фиксаторы 39 пуансонов 38, а блок 7 управления вторым исполнительным механизмом управляет муфтой 41 включения пуансона 40. Фиксаторы 39 предназначены для жесткого соединения пуансона с подвижной траверсой пресса. При включении фиксатора пуансон движется вместе с траверсой - происходит вырубка, при отключенном фиксаторе траверса движется, а пуансон остается на месте - вы рубки не происходит. Фиксатор 39 приводит в действие электромагнит. По окончании вырубки, после прохождения кареткой 34 конечного числа шагов, срабатывает датчик 29 окончания вырубки, схваты каретки 34 раскрываются И она движется поступательно на исходную позицию к визитажному столу 33, и далее цикл работы повторяется. Устройство управления работает следующим образом. Сигналы от датчиков 22 и 23 меток координат, подключенных к информационным входам блока 2 запоминания информации, вырабатывают информацию о месте нахождения кoдиpoвш кa на визи тажном столе 33. Блоки 2 и 6 запоминания информации предназначены для запоминания п х m одноразрядных слов, поэтому представляют собой программированную матрицу и состоят изп регистров, число которых равно числу датчиков меток координаты X, а в каждом регистре число разрядов равно числу m датчиков меток координаты У. В свою очередь, число датчиков меток координаты X равно числу шагов каретки 34 при вырубке, а число датчиков меток координаты У равно числу пуансонов 38 малого диаметра. Датчики меток координаты Уподключены к горизонтальным шинам . матрицы блока 2 запоминания, а датчики меток координаты X через элементы 2И - к вертикальным шинам, причем первые входы элементов 2И являются информационными и подключены к датчикам координаты X, а вторые - управляющими и подключены к датчику 26 дефекта. По сигналу датчика 26 дефекта производится запись координаты дефекта, т.е. срабатывает триггер разряда регистра на пересечении вертикальной и горизонтальной шин блока 2 запоминания. К первой горизонтальной шине блока 2 подключены синхронные S-входы первых разрядов триггеров каждого ; регистра, к второй горизонтальной шине подключены синхронные S-входы вторых разрядов триггеров каждого регистра и т.д. К первой вертикальной шине подключены синхронизирующие Свходы всех триггеров первого регистра, к второй вертикальной шине подключены синхронизирующие С-входы триггеров второго регистра и т.д. Асинхронные R-входы Bcfex регистров триггеров подключены к управляющему входу обнуленияi Каждый блок запоминания информации имеет, кроме того, дополнительный контрольный триггер, который срабатывает при обнулении блока запоминания и обнуляется при первой записи. Выходы триггеров блока 2 запоминания подключены к синхронным S-входам триггеров блока 6 запо1данания, который имеет такую же структуру и объем памяти, как и блок 2, синхронизирующие С-входы триггеров блока 6 подключены к управляющему входу записи, асинхронные R-входы подключены к управляющему входу обнуления. При обнулении триггеров блока 6 запоминания контрольный триггер устанавливается, в единичное состояние. После окончания визитажа и срабатывания датчика 28 окончания визитажа сигнал последнего поступает на вход элемента И 27. Если к зтому моменту на контрольном выходе блока 6 запоминания, соединенном с выходом контрольного триггера, установлен сигнал 1, .то выходной сигнал 1 элемента И 27 поступает на вход управления записи блока 6эа, поминания, разрешая запись информации, установленной на входах его регистров . Этот же сигнал поступает на S-вход контрольного триггера блока 2 запоминания, выходной сигнал 1 прямого выхода которого, поступающий на шину обнуления, с небольшой задержкой обнуляет регистры, блока 2 запоминания. После этого блок 2 готов к слёдующему циклу визитажа, а блок 6 задает режим циклу вырубки участка полотна, закрепленного в каретке 34. После обрабатывания блока датчиков 3 состояния, сигнализирующего о точной остаг вке каретки ifa позиции вырубки, срабатывания гильотинного ножа 37 и включения подачи каретки 34 датчик 32 перемещения полотна начинает отсчет шагов каретки. Импульсы датчика 32 суммируются счетчиком 31, выходной двоичный код которого поступает на вход дешифратора 30. С выхода последнего позиционный двоичный код с числом разрядов п, равным числу шагов каретки 34 при вырубке, поступает на синхронизирующий вход блока
5управления исполнительным механизмом .
Блок 5 управления представляет собой m коммутаторов, а каждый коммутатор производит переключение с п направлений на одно. Каждый коммутатор содержит п многовходовых элементов И, выходы которых подключены к элементу ИЛИ - выходному элементу коммутатора. Первые входы элементов И являются информационными и подключены к инверсным выходам триггеров соответствующих по порядку регистров блока 6 запоминания, а номер триггера в регистре соответствует номеру коммутатора блока 5. Так, к элементам первого коммутатора подключены первые входы триггера регистров с 1-го до п-го в блоке 6, к элементам второго коммутатора вторые триггеры регистров, к элементам т-го коммутатора - т-е триггеры регистров блока 6. Вторые входы элементов И коммутатора являются синхронизирующими и подключены к соответствующим выходам дешифратора 30, причем входы первых элементов И всех комкоммутаторов подключены к первому выходу дешифратора 30, входы вторых элементов И - к второму выходу дешифратора 30, входы п-х элементов И коммутаторов - к ,п-му выходу деши атора 30. Третьи входы всех элементов И коммутатора являются блокировочными и подключены к блокировочному входу блока 5 управления исполнительны:м ме канизмом. Таким образом, на выходах блока 5 во время работы механизма вырубки установлен комбинационный Дво ичный код одного из регистров блока
6запоминания информации с учетом
блокировок, установленных блоком 11, причем после каждой вырубки и перемещения каретки 34 на один шаг по сигналу датчика 32 перемещения полотна, на выходе блока 5 появляется код следующего по порядку регистра блока 6, Каждый разряд выходного кода блока 5 поступает на вход управления соответствующего фиксатора 39, управляющего пуансоном 38. Сигнал 1 включает пуансон 38 для вырубки, сигнал 0 - отключает.
Одновременно выходные сигналы регистров блока 6 запоминания поступают на информационный вход шифратора 8, преобразующего многоразрядный двоичный выходной код блока 6 в п-разрядный код, определяющий номер шага для срабатывания пуансона 40 большого диаметра. Для определения номера шага срабатывания пуансона 40 большого диаметра необходимо по данным визитажа, храняпщмся в блоке 6 запоминания, зафиксирова:ть бездефектный участок полотна -с размерами, вырг1женными числом меток координат X и У, не меньшим, чем диаметр пуансона 40, проходящий во время вырубки под пуансоном 40.
Шифратор 8 состоит из первой группы многовходовых элементов И, входы которых соединены с инверсными выхог дами триггеров соответствующего регистра блока 6 запоминания. Число входов каждого элемента, т.е. число подключенных к каждому элементу И триггеров регистра, равно числу меток координаты У, перекрывающих диаметр пуансона 40. Выходы элементов первой группы соединены с входами многовходовых элементов И второй группы. Число входов элементов второй группы равно числу К меток координаты X, перекрывающих диаметр пуансона 40. К- входам первого по порядку элемента И второй группы подключены выходы К элементов И первой группы с 1-го поК-й,к второму элементу второй группы подключены выходы элементов И первой группы со 2-го по (, к третьему - с 3-го ,по (К+2)-й и т.д. К последнему элементу И второй группы подключены выходы элементов первой группы с (п-К)го по п-й. Таким образом, первая группа элементов И шифратора 8 фиксирует наличие дефектов на полотне в зоне работы пуансона 40 по вертикальным осям У с дискретностью установленных меток оси У, а вторая группа элементов шифратора 8 фиксирует дефекты по осям X и У, Выходные сигналы элементов И второй группы являются выходами шифратора 8 и в виде параллельного двоичного кода поступают на вход блока 9 сравнения кодов. Каждьщ разряд выходного кода блока 9 соответствует определённому шагу перемедения каретки 34 на позиции вырубки. Сигнал 1 разрешает вьфубку, сигнал О - запрещает. Блок 9 сравнения кодов производит поразрядное сравнение выходных кодов шифратора 8 и дешифратора 30. Блок 9 состоит из элементов ЗИ. Первый вход каждого элемента ЗИ соединен с соответствующим разрядом выходного кода пшфратора 8 и является информационным входом блока 9. Вторые входы элементов ЗИ соединены с соответствующими разрядами выходного кода дешифратора 30 и являются входами синхронизации блока 9. Третьи входы элементов ЗИ соединены с блокировочщлм входом блока 9 сравнения кодов. Выходы элементов ЗИ подключены к входам элемента ИЛИ, выходной сигнал которого является выходным сигналом блока 7 управления вторым исполнительным механизмом. При появлении на всех трех входах одного из элементов ЗИ блока сигналов 1 на выходе блока 7 появляется сигнал 1, включающий муфту 41 включения пуансона 40. Блок 11 формирования блокировок служит для формирования сигналов блокировок включения муфты 41 и фиксаторов 39 после срабатывания пуансона 40 на время перемещения кареткой 34 под соответствукидим пуансоно вьфубленного участка. Срабатывание пуансона 40 фиксируется датчиком 10 вырубки. Выходной сигнал этого датчика устанав-. ливает в единичное состояние второй триггер 13 блока 11. Сигнал О с инверсного выхода, триггера 13, поступающий на блокировочный вход блока 9 сравнения кодов, запрещает очередное включения пуансона 40. Сигнал 1 с прямого выхода триггера 13, поступающий на вход элемента И 17, разрешает прохождение через элемент И 17 импульсов датчика 32 перемещения полотна, которые поступают на вход счетчика 18 и затем на дешифратор 19. После отсчета числа шагов каретки 34, необходимого для перемещения полотна, закрепленного в каретке, на полдиаметра пуансона 40 сигнал с выхода дешифратора 19 обнуляет триггер 13 и, тем самым, снимает блокировку работы пуансона 40. Поскольку пуансоны 40 и 38 установлены на некотором расстоянии друг от друга, кратном длине щага каретки 34, участок полотна после вырубки пуансоном 40 подходит к линии пуансонов 38 через несколько шагов. На это время организуется задержка подачи блокировки на вход блока 5. После срабатывания триггера 13 сигнал 1 с его прямого выхода поступает на информационный вход регистра 20 блока 11, а на входы синхронизации этого регистра поступает сигнал (в виде параллельного кода) с дешифратора 30. Регистр 20 представляет собой набор из п триггеров. Синхронные Sвходы всех триггеров подключены к информационному входу регистра, а сиихронизирукмцие С-входы каждого триггера - к соответствующим по порядку номеров разрядам выходного кода дешифратора 30. Таким , в регистр 20 заносятся сигналы блокировка, пуансона 40 при каждом шаге каретки 34. Выходные сигналы регистра 20 в виде паралллельного кода поступают на информационный вход коммутатора 21, а на вход синхронизации коммутатора 23 поступают сигналы с дешифратора 30 также в виде параллельного позиционного двоичного кода, но без первых q разрядов, который в шагах каретки 34 учитьгеают расстояние между осями пуансонов 40 и 38. Выходной сигнал коммутатора 21, поступающий на S-вход триггера 12, устанавливает последний в единичное состояние. С инверсного выхода триггера 12 сигнал О блокирует срабатывание пуансонов 38, расположенных на пути вырубленного участка, а с прямого выхода триггера 12 сигнал 1 включает элемент И 14, пропускакядйй на счетчик 15и дешифратор 16 импульсы датчика 32 перемещения полотна. После отсчета счетчиком 15 числа шагов каретки 34, необходимого для перемещения каретки на расстояние, равное диаметру пуансона 40, выходной сигнал дешифратора 16обнуляет триггер 12, снимая блокировку. После окончания вырубки из участка полотна, закрепленного в кар.етке 34,
сигнал датчика 29 окончания вырубки, поступающий на управляющий вход блока 6 запоминания информации, обнуляет регистры блока 6 запоминания, каретка 34 возвращается в исходное положение на визитажном столе 33, и после окончания визитажа очередного участка полотна цикл работы повторяется.
Таким образом, в устройстве реализована возможность непрерывного изготовления мембран из материала со случайно расположенными дефектами, одновременного выполнения двух операций - контроля материала и вырубки мембран, а также вырубки мембран одновременно нескольких типоразмеров, что позволяет сократить технологические отходы и повысить производи-;тельность установки.
Формула изобретения
1. Устройство управления установкой контроля и вырубки плоских мембран, содержащее блок преобразования входной информации, выходы которого подключены к информационным и управляющим входам блока запоминания информации, блок датчиков состояния, датчик перемещения материала, блок управления приводом исполнительного механизма, и блок управления приводом перемещения материала, отличающее с я тем, что, с целью повы- шения производительности и сокращения 35 отходов при вырубке путем автоматизации процесса,, оно дополнительно оснащено вторым блоком запоминания информации, вторым блоком управления приводом исполнительного механизма, датчиком вырубки, датчиком окончания визитажа, элементом И, блоком формирования блокировок, датчиком окончания вырубки и последовательно соединенными счетчиком и дешифратором, при этом 45ния, первая группа п входов - вхоблок преобразования входной информа-дами синхронизации этого блока, втоции состоит из датчиков меток коорди-рая группа входов соединена с соотнат X и У, последовательно подключаемых в процессе работы к соответствующим считывателям меток, и датчика де- soвходами второго блока управления, а фекта, . п первых выходов и m вторыхтретий вход блока сравнения является выходов блока преобразования входнойблокировочным входом этого блока, информации, а также третий выход этого блока соединены соответственно с ,п и m информационными и первым уп- 55ния блоки1 овок содержит два триггера, равляющим входами первого блока запо-два элемента И, два дешифратора, реминания информации, nm выходов кото-гистр и коммутатор, при этом инверсрого соединены с соотвятт-твующими ин-ные выходы триггеров являются соотформацконными входами второго блока запоминания информации, датчик окончания визитажа через первый вход элемента И соединен с вторым управляющим входом первого и первым управляющим входом второго блока запоминания информации, второй управляющий вход которого подключен к датчику окончания рырубки, контрольный выход - к второму входу элемента И, а информационные выходы соединены с информационными входами первого и второго блоков управления исполнительным механизмом, блокировочный вход последнего соединен с первым выходом блока формирования блокировок, второй вьпсод которого соединен с блокировочным входом первого блока управления приводом исполнительного механизма, п выходов дешифратора подключены к первой группе входов блока формирования блокировок и входам синхронизации первого и° второго блоков управления приводом исполнительного механизма, из них
(n-q+1) выходов дешифратора - к второй группе входов блока формирования блокировок, причем q g п, третий вход которого соединен с датчиком вырубки, а четвертый вход - с датчиком перемещения материала и входом счетчика, п выходов датчика координаты X являются п первыми выходами, m выходов датчика координаты У являются m вторыми выходами, а выход датчика дефек40
ветствующими выходами шифратора, входы которого являются информационными
3. Устройство по П.1, о т л и ч аю щ е е с я тем, что блок формировата - третьим выходом блока преобразования входной информации, 2. Устройство ПОП.1, отличаю щ е е с я тем, что второй блок управления приводом исполнительного механизма, соединенный своим выходом с приводом исполнительного механизма, содержит ши4)ратор и блок сравнения, при этом выход блока сравнения является выходом второго блока управлеветственно первым и вторым выходами блока, сбросовые входы триггеров сое динены с выходами соответствующих им дешифраторов, подключенных каждый через свой счетчик к выходам соответ ствующих элементов И, первые входы которых соединены с соответствующими прямыми выходами триггеров, при этом прямой выход первого триггера соединен также с информационным входом ре гистра, входы синхронизации которого 1 2312являются первой группой п входов блока, а второй группой входов,блока являются входы синхронизации коммутатора, информационные входы которого подключены к выходам регистра, а выход - на установочный вход второго триггера , вторые входы элементов И являются четвертым , а установочный вход первого триггера - третьим входами бло



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения информации от дефектоотметчика | 1990 |
|
SU1764068A1 |
| Устройство для обработки листового материала | 1988 |
|
SU1523230A1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для контроля планарных структур | 1984 |
|
SU1167620A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для считывания и распознавания изображений на карте с электропроводящими элементами | 1983 |
|
SU1124348A1 |
| Устройство для распознавания элементов треков | 1983 |
|
SU1161969A1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| СПОСОБ КОНТРОЛЯ ВЕЛИЧИНЫ ДОПУСТИМОГО СБЛИЖЕНИЯ ДВУХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033359C1 |
Изобретение относится к технологической обработке волоконных и бумажных материалов путем вьфубки, резки или штамповки изделий из них и решает задачу повышения производительности процесса вырубки и сокращения отходов, в частности при производстве диализных мембран из листового материала. Обеспечивается автоматическая работа установки контроля качества исходного материала и вырубки мембран благодаря созданной схеме устройства управления (УУ) установкой. УУ содержит два блока запоминания информации, два блока управления приводом исполнительного механизма вырубки, блок формирования блокировок вырубки де- . фектных участков материала. Блок преобразования УУ входной информации со-. стоит из датчика дефекта и датчиков меток координат X и У, количество которых определяется размерами вырубаемой детали. Устройство позволяет вырубать одновременно мембраны двух с размеров. Контроль дефектов материала определяется оператором визуально на О) визитажном столе до вырубки и занос сится в первый блок запоминания информации. 2 з.п. ф-лы, 2 ил.
| Устройство управления бумагорезательной машиной | 1982 |
|
SU1088930A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
