положении, определяемом точкой А. При этом звено 4 совершает качательное движение по траектории ., а ползун 5 совершает возвратно-поступательное перемещение. При перегрузке рычаг 10 повернется против часовой стрелки а опора 15 сместится влево, сжимая пружину 16, что даст возможность кривошипному валу 1 пройти правое положение без дальнейшего увеличения усилия.Так как плечо действия силы в точке О не изменяется в зависимости от угла поворота кривошипа, контроль усилия на ползуне может осуществляться на всей длине хода ползуна 5, т.е. практически с постоянным коэффициентом перегрузки. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм механического пресса | 1977 |
|
SU617295A1 |
| Исполнительный механизм механического пресса | 1988 |
|
SU1558705A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 2001 |
|
RU2217314C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ МЕХАНИЧЕСКИМ ПРЕССОМ | 1992 |
|
RU2069624C1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
| Механический пресс | 1976 |
|
SU639209A1 |
| Горизонтально-ковочная машина | 1985 |
|
SU1291268A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ ПОЛЗУНА ПРЕССА | 1972 |
|
SU350671A1 |
| Система управления механическим прессом | 1972 |
|
SU465054A1 |
Изобретение относится к области кузнечно-прессового майиностроения, а именно к конструкциям механических прессов. Цель изобретения - повьшение надежности. Для обеспечения хода ползуна 5 и при положении шарнира 11 вблизи положения А подается сжатый воздух в штоковую полость цилиндра 14. В результате рычаг 9 фиксируется в (Л ю 4 ( 
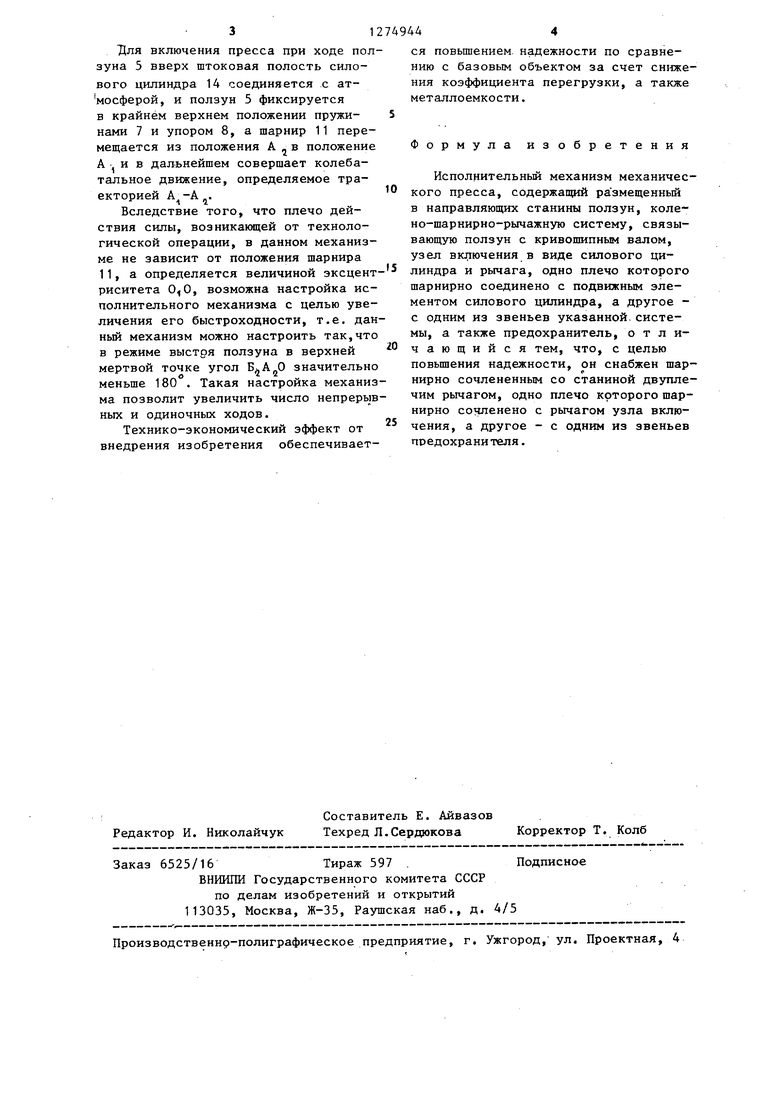
Изобретение относится к кузнечнопрессовому машиностроению, а именно к конструкции механических прессов. Цель изобретения - повьш1ение надежности. На чертеже показан исполнительный механизм, обш;ий вид. Механизм содержит вращающийся непрерывно при работе пресса кривошипный вал 1, соединенный при помощи шарнирных звеньев 2,3 и 4 коленнорычажной системы с ползуном 5, размещенным в направляющих станины 6 и взаимодействуюш 1М с пружинами 7, выполняющими роль уравновешивателя пол зуна. Крайнее верхнее положение ползуна 5 ограничивается упорами 8. Рычаг 9 в точке качания соединен шарнирно с двуплечим рычагом 10, которы в свою очередь шарнирно установлен на станине 6. Шарниром 11 рычаг 9 соединен со звеном 4, шарниром 12 со штоком 13 силового цилиндра 14 узла включения. Цилиндр 14 соединен .шарнирно со станиной 6. Второе пле чо двуплечего рычага 10 шарнирно соединено с опорой 15 предохранителя установленной свободно в станине 6 и подпружиненной предварительно сжатой пружиной 16. Механизм работает следующим: образом. При нахождении ползуна 5 в верхнем положении и вращающемся непрерыв но кривошипном вале 1 звено 3 совер шает качательное движение относитель но траектории Б, -Б,, а рычаг 9 относительно точки О по траектории А,-А Шток 13 совершает возвратно-поступательное перемещение относительно цилиндра 14. Для обеспечения хода ползуна 5 и при положении шарнира 11 вблизи положения А подается сжатьм воздух в штоковую полость цилиндра 14, в результате чего поршень фиксируется в крайнем правом положении (по чертежу), а рычаг 9 в положении, определяемом точкой А. В дальнейшем звено 4 совершает качательное движение по траектории , а ползун 5 - возвратно-поступательное движение по траектории В,-В. В результате того, что ось качания рычага 9 соединена со станиной 6 эксцентрично посредством малого плеча двуплечего рычага 10, усилие, действующее на шарнир О , при совершении технологической операции стремится развернуть рычаг 10 против часовой стрелки. Развороту рычага 10 препятствует предварительно сжатая пружина 16. Если при совершении технологической операции усилие превышает допустимое, рычаг 10 поворачивается против часовой стрелки, а опора 15 смещается влево, сжимая пружину 16,что дает возможность кривошипному валу 1 пройти правое положение без дальнейшего увеличения усилия. Вследствие того, что плечо действия силы в точке О при совершении технологической нагрузки не изменяется в зависимости от угла поворота кривошипа, контроль усилия на ползуне может осуществляться на всей величине хода ползуна, при любом положении кривошипа 1, и коэффициент перегрузки практически постоянен. Цля включения пресса при ходе ползуна 5 вверх штоковая полость силового цилиндра 14 соединяется с атмосферой, и ползун 5 фиксируется в крайнем верхнем положении пружинами 7 и упором 8, а шарнир 11 перемещается из положения А в положение А и в дальнейшем совершает колебатальное движение, определяемое траекторией А -А . Вследствие того, что плечо действия силы, возникающей от технологической операции, в данном механизме не зависит от положения шарнира 11, а определяется величиной эксцент риситета О;,О, возможна настройка исполнительного механизма с целью увеличения его быстроходности, т.е. дан ный механизм можно настроить так,что в режиме выстря ползуна в верхней мертвой точке угол ,jO значительно меньше 180°. Такая настройка механиз ма позволит увеличить число непрерыв ных и одиночных ходов. Технико-экономический эффект от внедрения изобретения обеспечивается повьш1ением надежности по сравнению с базовым объектом за счет снижения коэффициента перегрузки, а также металлоемкости. Формула изобретения Исполнительный механизм механического пресса, содержащий размещенный в направляющих станины ползун, колено-шарнирно-рычажную систему, связывающую ползун с кривошипным валом, узел включения в виде силового цилиндра и рычага, одно плечо которого шарнирно соединено с подвижным элементом силового цилиндра, а другое с одним из звеньев указанной системы, а также предохранитель, отличающийся тем, что, с целью повьш1ения надежности, он снабжен шарнирно сочлененным со станиной двуплечим рычагом, одно плечо крторого шарнирно сочленено с рычагом узла включения, а другое - с одним из звеньев предохранителя.
| Исполнительный механизм механического пресса | 1977 |
|
SU617295A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
