ВИЙ техЕ1Ики безопасности. Для достижения этой цели машина снабжена силовыми цилиндрами 26 и 27 связи зажимного 3 и высадочного 2 ползунов с станиной 1, фиксатором 23 с силовым цилиндром 24, установленными в ползуне 2 с регулируемой ползуш- кой 25 в станине 1, цилиндрами 18 и 19 перемещения кулака 16 соответственно вдоль и поперек оси ползуна 2. Механизм обратной связи выполнен в
1
Изобретение относится к кузнечно- прессовому оборудованию, а именно к горизонтально-К вочным машинам, преимущественно с горизонтальным разъемом матриц.
Целью изобретения является расширение технологических возможностей, повышение производительности и надежности, а также улучшение- условий техники безопасности.
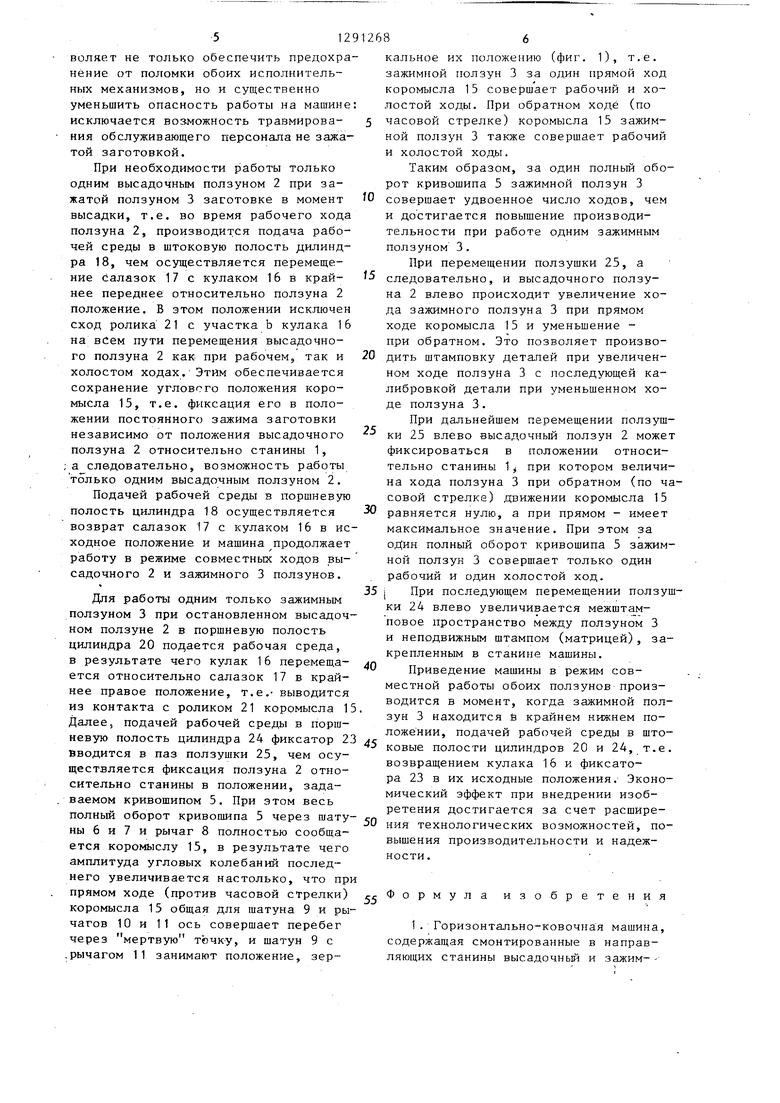
На фиг. 1 приведена кинематическая схема горизонтально-ковочной машины; на фиг. 2 - разрез А-А на фиг. 1..
В станине 1 размещены высадочный ползун 2 и механизм зажима в виде зажимного ползуна 3, кинематически связанного с кривашипно-шатунным приводом 4, выходными звеньями которого являются кривошип 5 и шатун 6. .
Кинематическая связь высадочного ползуна 2,с кривошипно-шатунным приводом 4 осуществлена посредством коленно-рычажного звена, состоящего из шатуна 7 и рычага 8, сочлененного х: шатуном 6 привода,
Связь зажимного ползуна 3 с приводом 4 содержит шатун 9, рычаг 10 и предохранитель от перегрузки, сое тоящий из рычагов 11 и 12, контропоры 13 и силового элемента, например, пружины 14. Узел обратной механической связи между высадочным ползуном 2 и зажимным ползуном 3 выполнен в виде смонтированного на станине 1 коромысла 15, ОДНИМ концом шарнирно связанного с рычагом 8 коленно-рычажного звена высадочного ползуна-2, .а противолежап;им - с рычагом 12 пре-
вил,« KcjpoMiiif iri I .1, i:Fni- пнио с копками с исполнительными механизмами 9- 14 зажимного ползуна 3 и 6-8 высадочного ползуна 2 с приводом от приводного кривошипа 5. В зависимости от положения ролика 21 и кулака 16 машина може 1 обеспечивать совместную цикловую работу ползунов 2 и 3 и индивидуальную работу одного из ползунов при неподвижном другом. 2 з.п. ф-лы, 2 ил.
fO
15
20
25
30
35
4С
дохранителя коленно-рычажного звена зажимного ползуна 3. Соотношение длин плеч коромысла 15 устанавливается в соответствии с величинами усилия зажима и высадки.
Кулак 16, управляющий степенью подвижности исполнительных механиз.мов машины, смонтирован на высадочном ползуне 2 посредством салазок 17, установленных на ползуне 2 с возможностью перемеа;ения в параллельном оси высадки направлении с помощью цилиндра 18, размещенного в ползу.не 2.
Посредством цилиндра 18 салазки 17, а соответственно и кулак 16 могут быть зафиксированы в крайних переднем или заднем относительно ползуна 2 положениях. Кроме того, салазки 17 снабжены направляющими 19 и другим цилиндром 20, управляющим положением кулака 16 относительно ползуна 2 в направлении,поперечном оси высадки.
Коромысло 15 снабжено опорным элементом, например, роликом 21, взаимодействующим с профилированной поверхностью кулака 16. Эта поверхность состоит из двух участков: участка а и участка Ь. Участок а выполнен в виде дуги окружности, кон. центричной оси поворота коромысла ,15, и переходит в участок Ь.
Режим работы зажимного ползуна 3, т.е. режим изменения усилия зажима заготовки в процессе высадки, может быть задан в виде функции от усилия на высадочном ползуне 2 или функции от перемещения последнего. В первом
312
случае (фиг. 1) участок Ь выполняется прямолинейным и параллельным направлению перемещения высадочного ползуна 2, а во втором - с другим профилем, соответствующим требуемому режиму изменения усилия зажима. В станине 1 машины выполнен упор 22, с которым взаимодействует торец кулака 16.
Устройство фиксации высадочного
ползуна 2 относительно станины 1 выполнено в виде фиксатора 23, управляемого цилиндром 24, и ползушки 25, регулируемой по положению относитель
До встречи ползуна усилие- зажима на зажим пропорционально величи линдра 27, стремящего зун 2 в исходное полож та встречи высадочного заготовкой усилие зажи не 3 благодаря наличию нической связи, осущес мыслом 15, становится ным усилию высадки, т
но станины 1. Зажимной ползун 3 урав- J5 высадочном ползуне 2. новешен цилиндром 26, а высадочный ползун 2 связан с станиной 1 посредством цилиндра 27.
При холостом ходе п ролик 21, обкатываясь профилированной поверх ка 16, удерживает коро ловом положении, соотв его положению при зажа ном 3 заготовке. Велич хода высадочного ползу на упором 22, взаимоде 25 кулаком 16. При достиж упора 22 ползун 2 оста Ролик 21 сходит с учас коромысло 15 расфиксир дальнейшем повороте кр ворачивается по часово через кинематически св исполнительный механиз жимной ползун 3 в исхо верхнее) положение.
Горизонтально-коночная машина работает следующим образом.
В поршневую полость цилиндра 18 и щтоковые полости цилиндров 20, 24, 26 и 27 подается рабочая среда - дпя цилиндров 26 и 27 предпочтительней воздух, для цилиндров 18, 20 и 24 -- жидкость.
Усилие, создаваемое рабочей средой в цилиндре 18, устанавливается большим, чем в цилиндре 27.
Привод 4 через кривошип 5, шатун и коленно-рычажное звено высадочного ползуна 2 - щатун 7 и рычаг 8 - сообщает коромыслу 15 угловое перемещение. Далее через рычаги 12 и 11 предохранителя и коленно-рычажное звено зажимного ползуна 3 - шатун 9 и рычаг 10 - движение передается зажимному ползуну 3. Происходит зажим заготовки. При этом высадочный ползун 2 находится в исходном (крайнем заднем положении. Его перемещению препятствует ролик 21, взаимодействующий с участком а профилированной поверхности кулака 16.
К моменту смыкания матриц коромысло 15 поворачивается настолько, что смонтированный на нем ролик 21 сходи с участка а кулака 16, а зажимной ползун 3 достигает своего крайнего нижнего положения и препятствует дальнейшему повороту коромысла 15. Таким образом, коромысло 15 занимает фиксированное положение, а ролик 21 и кулак 16 не препятствуют перемещению высадочного ползуна 2.
При дальнейшем вращении кривошипа 5 высадочный ползун 2, преодолевая сопротивление цилиндра 27, начи
нает перемещение в направлении к заготовке. При этом ролик 21 катится по прямолинейному участку b кулака 16
До встречи ползуна 2 с заготовкой усилие- зажима на зажимном ползуне 3 пропорционально величине усилия цилиндра 27, стремящегося вернуть ползун 2 в исходное положение. С момента встречи высадочного ползуна 2 с заготовкой усилие зажима на ползуне 3 благодаря наличию обратной механической связи, осуществляемой коромыслом 15, становится пропорциональным усилию высадки, т.е. усилию на
высадочном ползуне 2.
высадочном ползуне 2.
При холостом ходе ползуна 2 назад ролик 21, обкатываясь по участку b профилированной поверхности кулака 16, удерживает коромысло 15 в угловом положении, соответствующем его положению при зажатой ползуном 3 заготовке. Величина холостого хода высадочного ползуна 2 ограничена упором 22, взаимодействующим.с кулаком 16. При достижении последним упора 22 ползун 2 останавливается. Ролик 21 сходит с участка Ь, т.е. коромысло 15 расфиксируется и при дальнейшем повороте кривошипа 5 поворачивается по часовой стрелке, и через кинематически связанный с ним исполнительный механизм приводит зажимной ползун 3 в исходное (крайне е верхнее) положение.
Таким образом, все исполнительные механизма машины приводятся в исходное Положение. После этого цикл повторяется.
Поскольку рьгчажные .исполнительные механизмы высадки и зажима кинематически связаны между собой коромыслом 15, осуществляющим между ползунами обратную механическую связь, то при возникновении перегрузки в кинематической цепи высадочного ползуна 2, или в цепи зажимного ползуна 3 срабатывает предохранитель и остающаяся часть хода кривошипа 5 расходуется на излом рычагов 11 и 12 предохранителя относительно юс общей оси соединения.
При этом цилиндры 27 и 26 возвращают соответственно высадочный ползун 2 и зажимной ползун 3 в их исходные положения, т.е. при срабатывании предохранителя от перегрузки происходит остановка ползунов 2 и 3 при вращающемся кривошипе 5. Это поз5129
воляет не только обеспечить предохранение от поломки обоих исполнительных механизмов, но и существенно уменьшить опасность работы на машине исключается возможность травмирования обслуживающего персонала не зажатой заготовкой.
При необходимости работы только одним высадочным ползуном 2 при зажатой ползуном 3 заготовке в момент высадки, т.е. во время рабочего хода ползуна 2, производится подача рабочей среды в штоковую полость дилинд- ра 18, чем осуществляется перемещение салазок 17с кулаком 16 в крайнее переднее относительно ползуна 2 положение. В этом положении исключен сход ролика 21 с участка b кулака 16 на всем пути перемещения высадочного ползуна 2 как при рабочем, так и холостом ходах. Этим обеспечивается сохранение углового положения коромысла 15, т.е. фиксадия его в положении постоянного зажима заготовки независимо от положения высадочного ползуна 2 относительно станины 1, ;а следовательно, возможность работы одним высадочным ползуном 2.
Подачей рабочей среды в поршневую полость цилиндра 18 осуществляется возврат салазок 17 с кулаком 16 в исходное положение и машина продолжает работу в режиме совместных ходов высадочного 2 и зажимного 3 ползунов.
Для работы одним только зажимным ползуном 3 при остановленном высадочном ползуне 2 в поршневую полость цилиндра 20 подается рабочая среда, в результате чего кулак 16 перемещается относительно салазок 17 в крайнее правое положение, т.е.- выводится из контакта с роликом 21 коромысла 15 ДалееS подачей рабочей среды в поршневую полость цилиндра 24 фиксатор 23 Вводится в паз ползушки 25, чем осуществляется фиксация ползуна 2 относительно станины в положении, задаваемом кривошипом 5. При этом весь полньш оборот кривошипа 5 через шатуны 6 и 7 и рычаг 8 полностью сообщается коромыслу 15, в результате чего амплитуда угловых колебаний последнего увеличивается настолько, что при прямом ходе (против часовой стрелки) коромысла 15 общая для шатуна 9 и рычагов 10 и 11 ось совершает перебег через мертвую точку, и шатун 9 с .рычагом 11 занимают положение, зер1268
5
0
5
0
5
0
5
0
5
кальное их положению (фиг. 1), т.е. зажимной ползун 3 за один прямой ход коромысла 15 совершает рабочий и холостой ходы. При обратном ходе (по часовой стрелке) коромысла 15 зажимной ползун 3 также совершает рабочий и холостой ходы.
Таким образом, за один полный оборот кривошипа 5 зажимной ползун 3 совершает удвоенное число ходов, чем и достигается повышение производительности при работе одним зажимным ползуном 3.
При перемещении ползушки 25, а следовательно, и высадочного ползуна 2 влево происходит увеличение хода зажимного ползуна 3 при прямом ходе коромысла 15 и уменьшение - при обратном. Это позволяет производить штамповку деталей при увеличенном ходе ползуна 3 с последующей калибровкой детали при уменьшенном ходе ползуна 3.
При дальнейшем перемещении ползушки 25 влево высадочный ползун 2 может фиксироваться в положении относительно станины 1, при котором величина хода ползуна 3 при обратном (по часовой стрелке) движении коромысла 15 равняется нулю, а при прямом - имеет максимальное значение. При этом за оДин полный оборот кривошипа 5 зажимной ползун 3 совершает только один рабочий и один холостой ход. i При последующем перемещении ползушки 24 влево увеличивается межштам- повое пространство между ползуном 3 и неподвижным штампом (матрицей), закрепленным в станине машины.
Приведение машины в режим совместной работы обоих ползунов производится в момент, когда зажимной ползун 3 находится fi крайнем нижнем положении, подачей рабочей среды в што- ковые полости цилиндров 20 и 24, т.е. возвращением кулака 16 и фиксатора 23 в их исходные положения. Экономический эффект при внедрении изобретения достигается за счет расширения технологических возможностей, повышения производительности и надежности.
Формула изобретения
1. Горизонтально-ковочная машина, содержащая смонтированные в направляющих станины высадочный и зажим-
71
ной ползуны с узлом нх обратной связи, рычажные исполнительные механизмы с кривошипно-шатунным приводом ползунов, предохранитель от перегруз ки и механизм управления числом степеней подвижности исполнительного механизма с кулаком, роликом и упором на станине, отличающая- с я тем, что, с целью расширения технологических возможностей, повышения производительности и надежности, а также улучшения условий техники безопасности, она снабжена силовыми цилиндрами связи ползунов со станиной, механизмом регулировки положения кулака, механизмом фиксации высадочного ползуна в станине, узел обратной связи выполнен в виде шар- нирно закрепленного на стднине коромысла, кинематически связанного своими противолежащими с исполнительными механизмами, ролик механизма управления числом степеней подвижности исполнительного механизма жестко связан с коромыслом и смонтирован с возможностью взаимодействия с кулаком, а последний смонтирован с возможностью взаимодействия с упором.
Редактор А.Петров
Составитель И.Токарев
Техред И.Попович Корректор Е.Сирохман
Заказ 77/12Тираж 583Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, А
O
268
5
0
5
8
2.Машина по п. 1, о т л и ч а ю- щ а я с я тем, что механизм регулировки положения кулака выполнен
в виде смонтированных на высадочном ползуне вдоль его оси силового цилиндра и подвижных салазок, связанных со штоком этого цилиндра, а также размещенных на салазках перпендикулярно оси высадочного ползуна силового цилиндра со штоком направляющих, при этом кулак смонтирован с возможностью в(рзвратно-по- ступательного перемещения по направ- лякяцим салазок и жестко связан с штоком последнего силового цилиндра.
3.Машина по п. .1, отличающая с я тем, что механизм фиксации высадочного ползуна в станине выполнен в виде расположенного в высадочном ползуне силового цилиндра
с штоком и закрепленньм на нем фиксатором и размещеннной в станине регулируемой .полззппки -с соответствумцим фиксатору пазом , смонтированной с возможностью взаимодействия ее паза с фиксатором .
%г2
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
| Горизонтально-ковочная машина | 1977 |
|
SU904859A1 |
| Автомат для высадки | 1974 |
|
SU512845A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| Гвоздильный автомат | 1978 |
|
SU751486A1 |
| Автомат для изготовления гвоздей | 1975 |
|
SU742013A1 |
| Гвоздильный автомат | 1982 |
|
SU1121085A1 |
| Автомат для двухсторонней высадки деталей стержневого типа | 1980 |
|
SU935193A1 |
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1972 |
|
SU435044A1 |
Изобретение относится к кузнеч- но-прессовому оборудованию, а именно к горизонтально-ковочнь1м машинам, пре- имуще.ственно с горизонтальным разъемом матриц. Целью изобретения является расширение технологических возмож- ностей, повышение производительности и надежности, а также улучшение усло25 (Л 9иг.1
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 0 |
|
SU356032A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
