/7
Изобретение относится к пневмоав - томатике.и вычислительной техникед в частности к устройствам дистанционного контроля пневматических исполга-i тельных механизмов, и может быть использовано в химической, нефтехимической и смежных отраслях промьшитен- ности при создании систем централизованного контроля и управления н автоматизированных систем управления технологическими процессами.
Цель изобретения - расширения функциональных возможностей устройства. .
На чертеже представлена блок-схе - ма устройства дистанционного контро- - ля пневматических исполтштельных механизмов. Устройство содержит источник 1 знакопеременного расхода клапан 2, аналоговьш пневмоэлектропреобразова тель 3, коммутатор 4, кнопку 5, пер- вьй дискрет.ньм пневмоэлектрический преобразователь 6, блок 7 .а ре- жима, импульсатор 8, датчик 9 лютного давления, второй дискретный пневмоэлектрический преобразователь 10, вычислительньй блок 11, канал 12 аналогового ввода, канал 13 дискретного ввода, канал 14 аналогового вывода, канал 15 дискретного Бьюода, дисплей 1бр имгухЕьскую линию 17 иИс полнитель ньй механизм (ИМ) 18,
Устройство работает следующим образом.
С помощью блока 7 выбора режима подается дискретньй сигнал с .информа :цией об адресе контролируемого ИМ на управляющий вход коммутатора 4 и на ,в1з1ходы импульсатора 8 и второго дискретного пневмоэлектрического преобразователя 10, При этом на выходе импульса- тора 8 формируется кратковременньш сигнал длительностью , поступающий на управляющий вход клапана 2, а на выходе пр зобразователя 10 электрический сигнал, поступакшщй в канал 13 дискретного ввода вычислительного блока 11. При поступлении этих сигналов происходит подключение входной камеры ИМ 18 через импульсную линию 17 и коммутатор 4 к выходу источника 1 знакопеременного расхода g через клапан 2 - на время бГ к атмосфере. При этом происходит сброс воздуха из импульсной линии 17 к входной камере ИМ 18, Одновременно в вычислительном блоК;е 11 фиксирует™
5
5
0
5
0
ся адрес контролируемого ИМ и на его ,. аналоговом выходе (канал 14) формируется сигнал, величина которого с определяется типом контролируемого ИМ. Этот сигнал поступает на управляющий вход источника 1 расхода, в котором устанавливается соответствующая величина массового расхода
0 воздуха. С помощью кнопки 5 подается кратковременньй сигнал на стартовый вход источника 1 расхода и через первьй дискретньй пневмоэлектрический преобразователь 6 в канал 13дис5 кретного ввода вычислительного блока 11. При этом включается в работу источник 1 расхода, с выхода которого в и шyльcнyю линию 17 ИМ 18 через кoм ryтaтop 4 начинает поступать
0 воздух с постоянным 1ассовым расходом, величина которого определяется величиной аналогового сигнгша, поступающего на управляющий вход источника 1 расхода. Одновременно начинается отсчет врэмени tj в вычислительном блоке 11. На входе аналогового пневмоэлектропреобразова- теля 33 начинает расти давление, и на его выходе формируется аналоговый электрический си .г нал, величина которого соответствует величине давления Р/ воздуха во входной камере ИМ 18 (прямой ход им) Выходной сигнал преобразователя 3 и выходной сигнал датчика 9 абсолютного давления, пропорциональньп величине атмосферного давления на момент контроля ИМ 18 5, поступают З канал 12 аналогового -ввода вычислительного блока 1 1 .
При достижении дазшением во входной камере 1Ш 18 величины Р Рпр (например, 1,25 кГс/см) в источнике 1 расхода происходит переключение каналов, и начинается сброс воздуха с прежней вшшчиной массового расхода из входно1 камеры ИМ 18 в атмосферу (обратньв ход ИМ). Работа источника pacxo l;a прекращается при достижении величиной давления воздуха во входной Кс.мере ИМ 18 нулевого значения (Р 0), после чего блок 7 приводится в Исходное состояние. При этом приходят в исходное - состояние также коммз татор 4 и вычис5 лительньй блок 11.
При прямом и обратном ходе ИМ 18 в вычислительном бло1 :е 11 формируются зависимости
p-tl
(1) и dP,-/tj - t; (2)
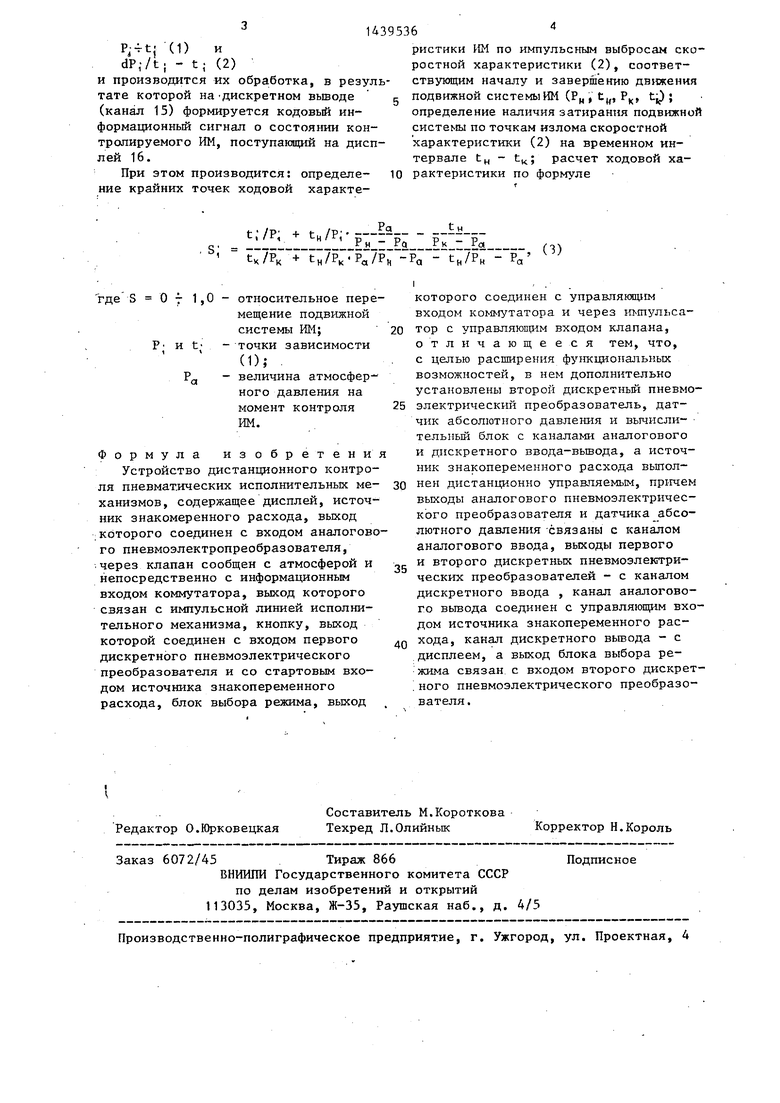
И производится их обработка, в результате которой на Дискретном вьшоде (канал 15) формируется кодовый информационный сигнал о состоянии контролируемого ИМ, поступающий на дисплей 16.
При этом производится: определе- ние крайних точек ходовой характель g п1439536
ристики tM по импульсным выбросам скоростной характеристики (2), соответствующим началу и завершению дв1вкения подвижной системы ИМ (Р„ , t, Р, tp ; определение наличия затирания подвижной системы по точкам излома скоростной характеристики (2) на временном интервале
рактеристики по формуле
расчет ходовой ха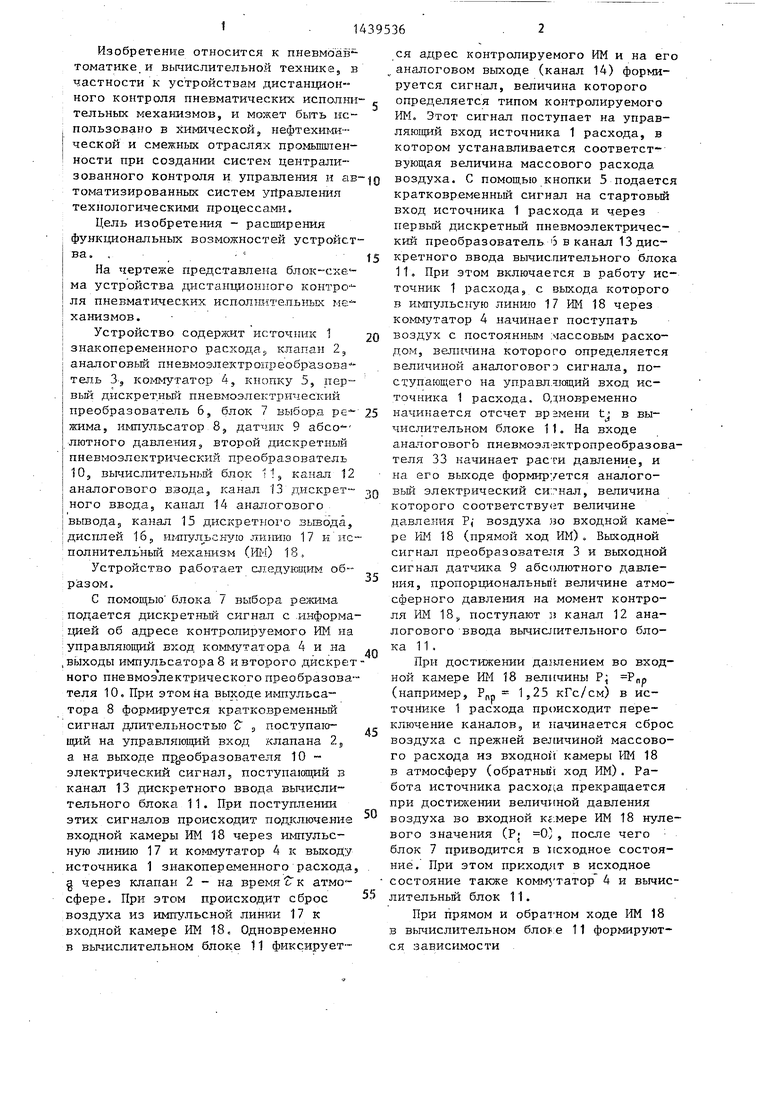
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Устройство для ввода информации с пневматических датчиков в электронную цифровую вычислительную машину | 1976 |
|
SU643951A1 |
| Устройство для ввода информации | 1980 |
|
SU920812A1 |
| Устройство для ввода информации | 1979 |
|
SU830364A1 |
| Способ дистанционного контроля пневматических исполнительных механизмов | 1984 |
|
SU1275378A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Система централизованного контроля параметров,представленных пневматическими сигналами | 1978 |
|
SU742878A1 |
| Пневматическое устройство для централизованного контроля и управления | 1974 |
|
SU594485A1 |
| Система ввода информации от пневматических датчиков в управляющий вычислительный комплекс | 1987 |
|
SU1427405A1 |
| Устройство управления объектами | 1979 |
|
SU873246A1 |
Изобретение относится к области пневмоавтоматики,в частности к устройствам контроля пневматическихисполнительных механизмов (ИМ). Целью изобретения является расширение функциональных возможностей устройства. Устройство содержит источник знакопеременного расхода 1, выполненньй дистанционно управляемым, к которому подключается контролируемьй ИМ 18 совместно с импульсной линией 17, блок выбора режима 7, и шyльcaтop 8, коммутатор 4, клапан 2, дискретньй пневмоэлектрический преобразователь 10, образунище подготовителыгую систему устройства контроля пневматш1ес- ких ИМ, кнопку 5, дискретньй пневмо- электрическкй преобразоватепь 6, об- разуклцие стартовую систему устройства, аналоговый пневмоэлектропреобра- зователь 3, датчик абсолютного давления 9, вычислительный блок 11 с ка- § налами аналогового и дискретного ввода/вьшода - 12 - 15 и дисплей 16, вьтолняющие функции формирования режима контроля, обработки и отображе - ния информации о состоянии ИМ. 1 ил.
Pq
t;/p; + tH/p; LJJ 1 -i-ii -u (-))
t,/p + t«/p,.p«/p, -Pa - t,/p, -
tH
PK - Pot
де S 07 1,0 P и tотносительное перемещение подвижной системы ИМ; 20 точки зависимости (1)1 .
величина атмосфер- ного давления на момент контроля 25 ИМ.
Формула изобретени
Устройство дистанционного контроля пневматических исполнительных ме- ханизмов, содержащее дисплей, источник знакомеренного расхода, выход которого соединен с входом аналогового пневмоэлектропреобразователя, .через клапан сообщен с атмосферой и непосредственно с информационным входом коммутатора, выход которого связан с импульсной линией исполнительного механизма, кнопку, выход которой соединен с входом первого дискретного пневмоэлектрического преобразователя и со стартовым входом источника знакопеременного расхода, блок выбора режима, выход
Pq
1 -i-ii -u
p, -Pa - t,/p,
tH
PK - Pot
5
О
5
0
которого соединен с управляющ1гм входом кo iмyтaтopa и через импзшьса- тор с управляюпщм входом клапана, отличающееся тем, что, с целью расширения функциональных возможностей, в нем дополнительно установлены второй дискретньй пневмо- электрический преобразователь, датчик абсолютного давлезшя и вычисли- тельный блок с каналами аналогового и дискретного ввода-вьшода, а источник знакопеременного расхода выполнен дистанционно управляемым, причем выходы аналогового пневмозлектричес- кого преобразователя и датчика абсолютного давления -связаны с каналом аналогового ввода, выходы первого и второго дискретных пневмозлектри- ческих преобразователей - с каналом дискретного ввода , канал аналогового вьгоода соединен с управляющим входом источника знакопеременного расхода, канал дискретного вывода - с дисплеем, а выход блока выбора режима связан с входом второго дискрет- .ного пневмоэлектрического преобразователя.
| Способ контроля аналоговых пневматических исполнительных механизмов | 1978 |
|
SU767708A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ дистанционного контроля пневматических исполнительных механизмов | 1984 |
|
SU1275378A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
