(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМИ ЗАДАТЧИКАМИ В СИСТЕМАХ РЕГУЛИРОВАНИЯ И КОНТРОЛЯ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ
1
Изобретение относится к приборостроению, а именно к системам управления пневматическими групповыми задатчиками, и может найти применение 3 комплексах технических средств, используемых в автоматизированных системах управления технологическими процессами.
Известна система управления пневматическим групповым задатчиком, содержащая блок дистанционного управления, блок задатчиков, выход которого подключен к вькоду системы и входам коммутатора, соединенного с блоком индикации и адресными каналами, реверсивный двигатель, вход которого подключен к выходам блока дистанционного упрашления, размещенный на одном валу с реверсивным двигателем блок кинематических передач по числу задатчиков и соединенный с мим блок муфт сцепления, подключенный ко входам блока задатчиков, при этом управляющие входы блока муфт сцепления соединены с гцфесными каналами 1 .
Недостаток изэестной системы состоит в том, что при ее использовании возможно формирование такого максимального (или минимального)) давления, при котором маховик штока задатчика входит в соприкосновение с механическим ограничителем его перемещения, при этом происходит заклинивание в резьбовом соединении шток-корпус задатчика.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство
10 для управления пневматическими задатчиками, содержащее блоки групповых задатчиков, выходы которых через коммутатор и коллектор связаны с многошкальным индикатором, каналы
15 адресации точек и агрегатов, которые через элементы И соединены с управляющими входами коммутатора и блоков групповых задатчиков, и переключатель С2.1.
20
Недостатком известного устройства является то, что при управлении с помощью переклЛчателя задатчикги«ш возможно формирование такого максимального (минимального давления, при
25 котором маховик штока чадатчика входит в соприкосновение с механическим ограничителем его перемещения; при этом происходит заклинивание в резьбовом соединении шток-корпус задат30 чика. В результате при необходимости формирования в последующий момент времени промежуточного по значению сигнала PCPjYiiv, ЫРmax) обратного перемещения штока и вращения маховика контролируемого задатчика не происходит, что прнводит к необходимости вмешательства ремонтного персонала в работу группового задатчика. Кроме того, при нажатии на тумблер в переключателе одновременно начинсцот вращаться электродвигатели всех имеющихся в устройстве блоков групповых задатчиков, в результате повышается расход электроэ-нергии и сокращается срок их службы.
Цель изобретения - повышение надежности устройства.
Поставленная цель достигается тем, что в устройстве для управления пневматическими задатчиками в системах регулирования и контроля технологических объектов, содержащем блоки групповых задатчиков, выходы которых через коммутатор и коллектор связаны с многошкальным индикатором, каналы адресации точек и агрегатов, которые через элементы И соединены с управляющими входами коммутатора и блоков групповых задатчиков, и переключатель, установлены блоки ограничения максимального и минимального сигналов, входы которых связаны с коллектором, первые пневмоэлектропреобразователи по числу блоков групповых .задатчиков и второй и третий пневмоэлектропреобр.азователи, управляющие входы первых пневмоэлектропреобразователей соединены с каналами адресации соответствующих агрегатов, входы - с пзрвым выходом переключателя, а выходы - с первыми входами соответствующих блоков групповых задатчиков, управляющие входы второго и третьего пневмоэлектропреобразователей соединены, с выходами, соответственно,; блоков ограничения максимального и минимального сигналов, входы второго и третьего пневмоэлектропреобразователей соединены со вторым и третьим выходами переключателя, а выходы - со вторым и третьим входами каждогоблока групповых задатчиков .
Кроме того, каждый блок групповых задатчиков содержит подключенные к управляющим входам блока приводытолкатели, связанные с, соответствующими им задатчиками, электродвигател со шкивом и маховики, закрепленные на штоках соответствующих им задатчиков и расположенные по окружности вокруг шкива электродвигателя, выходы задатчиков подключены к выходам блока, причем входы электродвигателя соединены с первым, вторым и третьим входами блока.
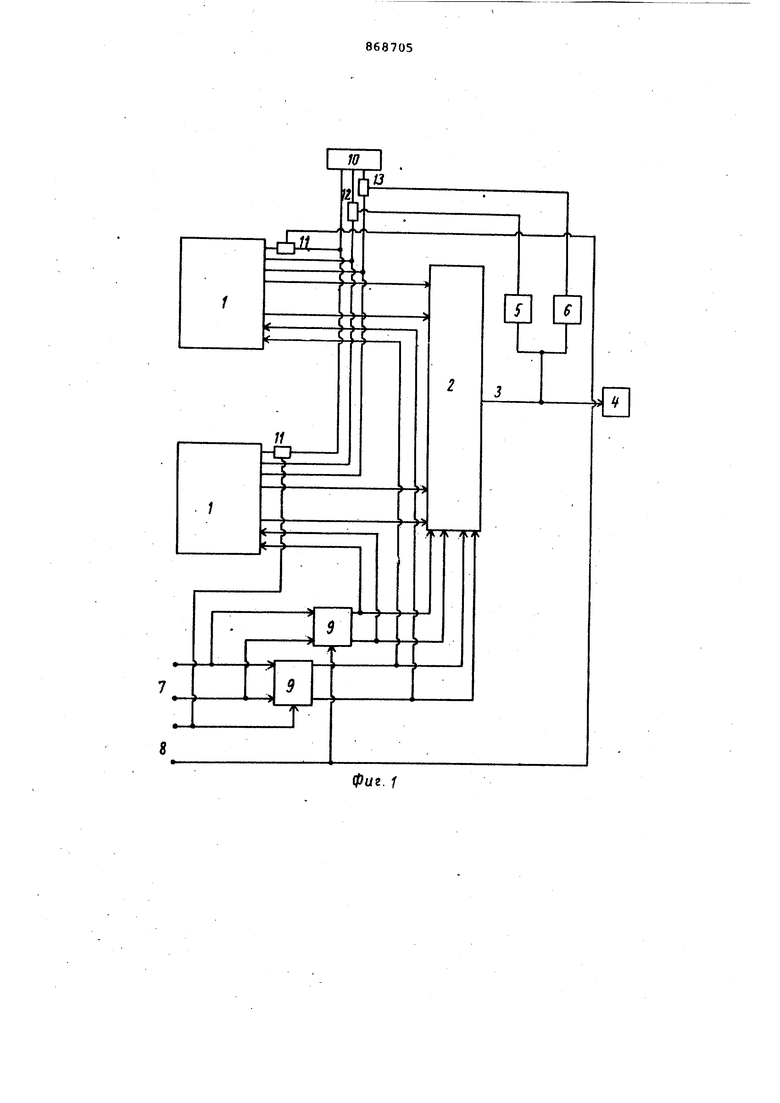
На фиг.1 представлена принципиальная схема предлагаемого устройства, на фиг.2- блок групповых задатчиков; на фиг.З - вид А на фиг.2. Устройство для управления содержит блоки 1 групповых задатчиков, формирующие сигналы заданий регуляторам (или дистанционного управления исполнительными механизмами) и соединенные с коммутатором 2, выход которого через коллектор 3 связан с многошкальным индикатором 4 и с блоками 5 и 6 ограничения максимального и минимального сигналов, каналы
7и 8 адресации точек и агрегатов, связанные через элементы И 9 с управляющими входами коммутатора 2 и блоков 1 групповых задатчиков, переключатель 10, выходы которого связаны с первыми 11, вторым 12 и третьим 13 пневмоэлектропреобразователями.
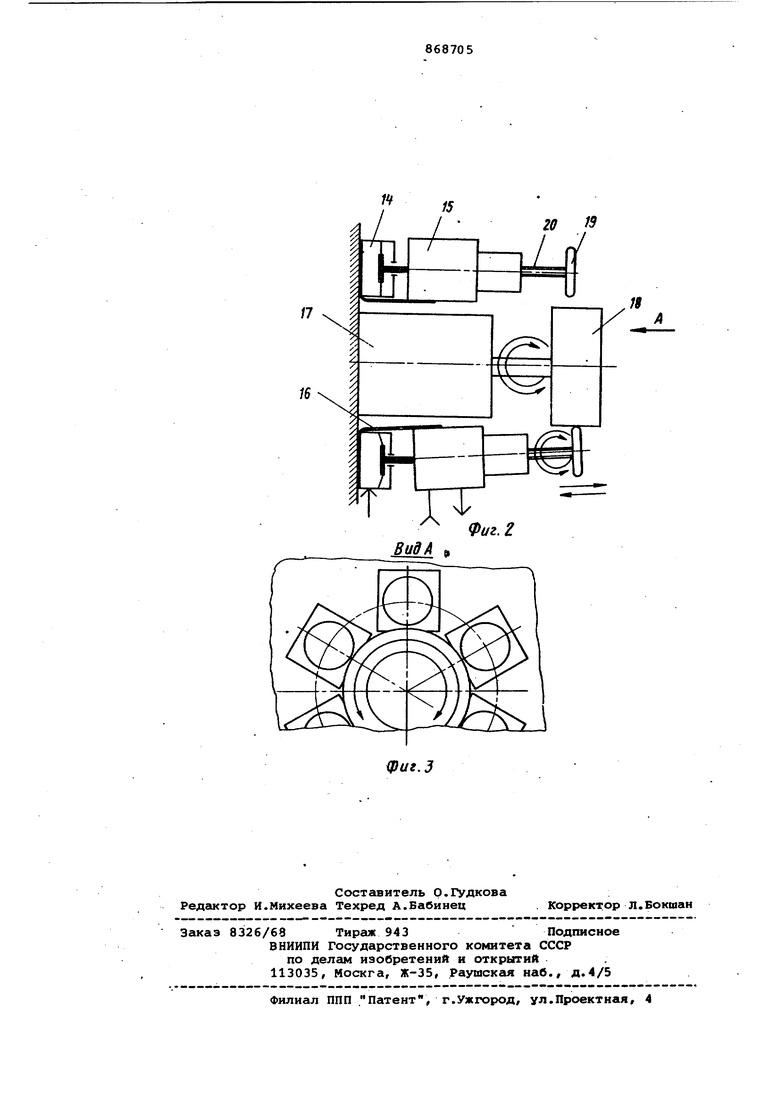
Блок 1 групповых задатчиков включает приводы-толкатели 14, расположенные под задатчиками 15, пружин 16, электродвигатель 17 с закрепленным на его оси шкивом 18 и маховики 19, закрепленные на штоках 20 соответствующих задатчиков 15.
Устройство работает следующим образом.
При контроле значения сигнала задания регулятору (или сигнала дистанционного управления исполнительным механизмом) оператор посылает по соответствующим каналам 7 и 8 адресации точек и агрегатов сигналы, которые собираются по схеме И на одном из элементов И 9.Выходной сигнал И 9 поступает на управляющий вход соответствующего блока 1 групповых задатчиков и коммутатор 2, при ,этом привод-толкатель 14 соответствующего задатчика 15 наклоняет его, пружина 16 изгибается, а маховик 19 прижимается к шкиву 18, укрепленному на оси электродвигателя 17. Таким образом, в зацеплении со шкивом 18 электродвигателя 17 оказывается маховик 19 того задатчика, выходной сигнал которого в настоящий момент проходит через коммутатор 2 в коллектор 3 на многоканальный индикатор 4.
При необходимости изменения значения выходного сигнала контролируемого задатчика оператор переводит рукоятку переключателя 10 в положение Больше или Меньше, что вызывает вращение электродвигателя 17 того блока групповых задатчиков, первый из пневмоэлектропреобразователей 11 которого срабатывает под действием выходного сигнала-в канале
8адресации агрегатов. Если выходной сигнал контролируемого задатчика достигает максимально или минимально допустимого значения, например
1 к ГС/см или 0,2 кгс/см соответственно, то срабатывает блок ограничения 5 максимального или 6 минимального сигнала, размыкающий нормально замкнутый контакт второго 12 или третьего 13 пневмоэлектропреобр зователя соответственно, в том числе пневмоэлектропреобраэователя, че рез который в предыдущий момент вре мени проходил ток на электродвигатель 17, осуществляющий вращение штока 20 контролируемого задатчика 15, Шток 20 контролируемого задатчи ка 15 не входит в соприкосновение с ограничителем, так как сигналы, огр ничивающие максимально и минимально допустимые значения выходного сигна задатчика, выбираются с запасом по степени перемещения его штока. Одновременно при срабатывании блока 5 или б ограничения срабатывает сигнальное табло (не показано оповещающее оператора о достижении штоком 20 задатчика 15 предельно допустимого положения. Применение предлагаемого устройства позволяет повысить надежность его функционирования и снизить энер гозатраты при его эксплуатации.. Формула изобретения I. Устройство для управления пневма тическими задатчиками в системах регулирования и контроля технологических объектов, содержащее блоки групповых задатчиков, выходы которы через коммутатор и коллектор связаны с многошкальным индикатором, канёшы адресации точек и агрегатов, которые через элементы И соединены с управляющими входами коммутатора и блоков групповых задатчиков, и переключатель, отличающее с я тем, что, с целью повышения на дежности устройства, оно содержит блоки ограничения максимального и минимального сигналов, входы которых связаны с коллектором, первые пневмоэлектропреобразователипо числv блоков групповых задатчиков и второй и третий пневмоэлектропреобраэователи, управляющие входы первых пневмоэлектропреобразователей соединены с каналами адресации соответствующих агрегатов, входы - с первым выходом переключателя, а выходы - с первыми входами соответствующих блоков групповых задатчиков, управляющие входы второго и третьего пневмоэлектропреобразователей соединены с выходами, софтветственйо, блоков ограничения максимального и минимального сигналов, входы второго и третьего пневмопреобразователей соединены со вторым и третьим выходами переключателя, а выходы - со вторым и третьим входами каждого блока групповых 3 адатчиков. 2. Устройство ПОП.1, отличающееся тем, что каждый блок групповых атчи ко в содержитподключенные к управляющим входам . блока приводы-толкатели, связанные с соответствующими им задатчиками, электродвигатель со шкивом и маховики, закрепленные на штоках соответствующих им задатчиков и расположенные по окружности вокруг шкива электродвигателя, выходы задатчиков подключены к выходам блока, а входы электродвигателя соединены с первым, вторым и третьим входаг-ш блока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 407288, кл. G 05 В 11/58, 1977. 2.Пневматические системы автоматизации технологических процессов. Методика проектирования. Руководящий технический материал РМ4-45-78. М., ЦНИИКА, ГПИ, ПМА, 1979, ч.2, с.129134, рис.29, (прототип).
фиг. /
В ид А
Риг.З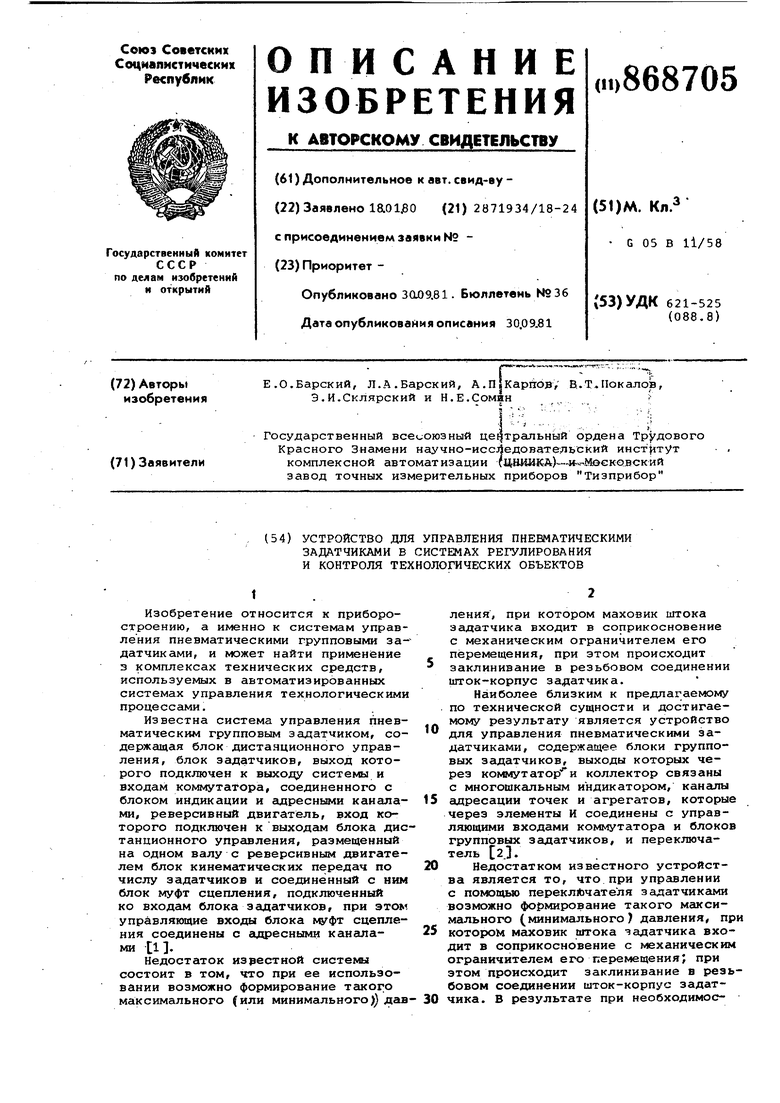
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство управления | 1980 |
|
SU881665A1 |
| Устройство управления пневматическими регуляторами | 1980 |
|
SU881664A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Устройство для связи управляющего вычислительного комплекса с пневматическими регуляторами | 1983 |
|
SU1163330A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| Пневматическая система централизованного контроля и управления агрегатами с непрерывными технологическими процессами | 1981 |
|
SU1043589A1 |
| Пневматическая система регулирования | 1987 |
|
SU1492344A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |