Изобретение относится к области машиностроения, и в частности к подъемно-транспортным устройствам для перемещения подвешенных грузов, и может найти применение в автоматических линиях, компактных роботах-манипуляторах и другой складывающейся робототехнике, а также в технологических сборочных установках, автомобильных подъемниках и эвакуаторах.
Известен грузоподъемный механизм, содержащий многозвенное рычажное устройство для приближенного перемещения в вертикальной плоскости шарнирного подвеса с переносимым грузом, выполненное в виде двухконтурного двухкоромыслового механизма грузоподъемной стрелы за счет изменения в ограниченных пределах угла ее наклона посредством гидроцилиндра, установленного между неподвижным основанием и этим коромыслом (Крайнев А.Ф. «Словарь-справочник по механизмам» - М.: Машиностроение, 1987, с. 317, схема на рис. «а»/издание второе) - аналог.
Недостатками известного грузоподъемного механизма являются сложность конструкции и сборки многошарнирных звеньев разной длины, ограниченная рабочая зона перемещения груза (равная ограниченной длине хода поршня в приводном гидроцилиндре), а также большие габариты в нерабочем положении.
Наиболее близким по технической сущности и достигаемому эффекту является грузоподъемный направляющий механизм крана, содержащий опорное основание с установленным на нем шарнирно-сочлененным устройством перемещения гибкого подвеса с переносимым грузом, которое выполнено в виде кинематически связанных между собой двух кривошипных механизмов, и одного двухкоромыслового механизма привода стрелы крана с удлиненным шатуном (статья Епчев К.Ц., Стойков С.Б. Совмещение экстремального и оптимизационного синтеза при проектировании направляющего механизма портального крана. // Теория механизмов и машин, №2 (12), 2008, Том 6. - Санкт-Петербург: СПбГПУ, схема грузоподъемного устройства на стр. 38, рис. 3) - прототип.
Недостатками указанного грузоподъемного шарнирного механизма являются:
1. Сложность конструкции, а также высокая трудоемкость изготовления и сборки шарнирно-сочленного грузоподъемного устройства (замкнутая кинематическая цепь привода которого составлена из сложных в изготовлении и сборке трехшарнирных и четырехшарнирных рычагов разной длины и количества).
2. Ограниченная рабочая зона подъема груза коромысловым механизмом обусловлена возникающими в нем большими углами давления.
3. Большие габариты рычажного механизма в нерабочем состоянии требуют при его транспортировки полной разборки и затем трудоемкой сборки всей конструкции.
4. Возникающие угловые колебания переносимого на подвесе груза (с амплитудой до 1 метра) приводят к перезагрузке приводного двигателя, перезагрузке шарнирного подвеса и его аварийному обрыву).
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции, увеличении рабочей зоны подъема подвесного груза и снижении габаритов грузоподъемного шарнирного механизма в нерабочем положении без его полной разборки и сборки.
Получение технического результата достигается за счет того, что замкнутая кинематическая цепь предполагаемого шарнирного подъемника выполнена в виде последовательно расположенных в одной плоскости и многократно соединенных между собой одинаковых шарнирных ромбов, которые составлены из пересекающихся между собой одинаковых трехшарнирных соединительных рычагов с расположением в них всех трех шарниров на одной прямой линии. Шарнирный ромб на одном конце замкнутой кинематической цепи соединен с опорным основанием, а шарнирный ромб на другом конце этой цепи соединен с подвесным грузом.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3 и фиг. 4.
На фиг. 1 представлен общий вид и рабочее положение стационарного складывающегося подъемника с одной степенью свободы (W=1), содержащего опорное основание 1 и шарнирный подвес 2 груза 3, кинематически связанные между собой посредством приводной замкнутой кинематической цепи. Упомянутая кинематическая цепь составлена в виде последовательно расположенных в одной плоскости и многократно соединенных между собой одинаковых шарнирных ромбов L0, L1, L2, L3, L4 и L5, которые составлены из пересекающихся и одинаковых между собой трехшарнирных соединительных рычагов 4, 5, 6, 7, 8, 9, 10, 11, 12 и 13 с расположением в каждом из них всех трех шарниров, например, О1, О2 и О3 (для рычага 4) или О4, О2 и О5 (для рычага 5) на одной прямой линии, где:  О1 и О3 = О4О5=О4О7=О3О8=О8О11=О7О10=O10O13=О11О14=О14О16=О13О17. Приводной шарнирный ромб L0, расположенный на одном конце замкнутой кинематической цепи, через два одинаковых двухшарнирных рычага 14 и 15 длиной
О1 и О3 = О4О5=О4О7=О3О8=О8О11=О7О10=O10O13=О11О14=О14О16=О13О17. Приводной шарнирный ромб L0, расположенный на одном конце замкнутой кинематической цепи, через два одинаковых двухшарнирных рычага 14 и 15 длиной  связан с опорным основанием 1 и эта связь с одной стороны выполнена в виде установленного на опорном основании 1 приводного ползуна 16, соединенного с вершиной ромба L0 через двойной цилиндрический шарнир А. С другой стороны опорное основание 1 связано с двумя трехшарнирным соединительными рычагами 4 и 5 в точке их пересечения через двойной цилиндрический шарнир О2. Оба двойных цилиндрических шарнира А и О2 выполнены с параллельными между собой осями вращения. Шарнирный подвес 2 выполнен в виде двухкратно изогнутого крюка, соединенного посредством двух одинаковых двухшарнирных рычагов 17 и 18 длиной
связан с опорным основанием 1 и эта связь с одной стороны выполнена в виде установленного на опорном основании 1 приводного ползуна 16, соединенного с вершиной ромба L0 через двойной цилиндрический шарнир А. С другой стороны опорное основание 1 связано с двумя трехшарнирным соединительными рычагами 4 и 5 в точке их пересечения через двойной цилиндрический шарнир О2. Оба двойных цилиндрических шарнира А и О2 выполнены с параллельными между собой осями вращения. Шарнирный подвес 2 выполнен в виде двухкратно изогнутого крюка, соединенного посредством двух одинаковых двухшарнирных рычагов 17 и 18 длиной  с расположенным на другом конце кинематической цепи шарнирным ромбом L5 с соотношением длин звеньев
с расположенным на другом конце кинематической цепи шарнирным ромбом L5 с соотношением длин звеньев 

На фиг. 2 представлен подвесной вариант выполнения складывающегося шарнирного подъемника с двумя степенями свободы (W=2) и самоустанавливающейся по вертикали кинематической цепи привода подвесного груза. Кинематическая цепь этого складывающегося шарнирного подъемника содержит последовательно установленные по вертикали и многократно соединенные между собой одинаковые шарнирные ромбы L1, L2, L3, L4 и L5 Кинематическая связь опорного основания 1 с начальным в цепи шарнирным ромбом L1 выполнена в виде двойного цилиндрического шарнира D, а упомянутый шарнирный ромб L1 снабжен приводным подвижным гидроцилиндром или пневмоцилиндром 19, установленным внутри этого ромба L1 по его диагонали NM и соединенным с противоположными вершинами этого ромба L1 через два двойных цилиндрических шарнира N и М с параллельными между собой осями вращения.
Кинематическая связь конечного в данной замкнутой цепи шарнирного ромба L5 с подвесным грузом выполнена в виде двухшарнирного звена 20, а подвесной груз выполнен в виде многопозиционного подвесного схвата 21, выполненного в виде зажимного шарнирного ромба EFHG, внутри которого по его диагонали FG установлен гидроцилиндр или пневмоцилиндр 22 привода зажимных элементов 23 и 24, 25 и 26, 27 и 28, которые сблокированы с соответствующими сторонами FE, FH, GE И GH зажимного шарнирного ромба EFHG.
На фиг. 3 представлен вариант выполнения складывающегося шарнирного подъемника в его сложенном по вертикали нерабочем положении, выполняемым без разборки и сборки всей его цепи. Кинематическая связь опорного основания 1 с шарнирным ромбом, содержащим приводной гидроцилиндр 19, выполнена в виде двухподвижного вращательного устройства 29 с перпендикулярными между собой осями вращения.
На фиг. 4 представлен вариант выполнения складывающегося шарнирного подъемника, который снабжен поворотной платформой 30, выполненной с возможностью полного реверсивного поворота от вращательного двигателя, а опорное основание 1 вместе с шарнирными ромбами соединено с поворотной платформой 30 через цилиндрический шарнир  и кинематически связано с ней посредством приводной винтовой кинематической пары 31, для образования поворотного складывающегося подъемника с тремя степенями свободы и возможностью перемещения подвесного груза 3 под заданным углом β≥0 наклона его траектории к горизонтали. Подвесной груз 3, подвижно соединен с шарнирным ромбом L5 на выходе цепи посредством двухкратно изогнутого крюка, совмещенного с трехподвижной сферической кинематической парой 32.
и кинематически связано с ней посредством приводной винтовой кинематической пары 31, для образования поворотного складывающегося подъемника с тремя степенями свободы и возможностью перемещения подвесного груза 3 под заданным углом β≥0 наклона его траектории к горизонтали. Подвесной груз 3, подвижно соединен с шарнирным ромбом L5 на выходе цепи посредством двухкратно изогнутого крюка, совмещенного с трехподвижной сферической кинематической парой 32.
Работа представленного шарнирного подъемника заключается в следующем.
Замкнутая кинематическая цепь подъемника при малом ходе «s» поршня приводного гидроцилиндра обеспечивает суммирование переменных по величине длин диагоналей всех шарнирных ромбов, что приводит к k - кратному увеличению высоты подъема Н подвесного груза, рассчитываемой по формуле:
Н=k*s,
где k - число шарнирных ромбов между опорным основанием и подвесом груза, а снижение габаритов подъемника Г за счет складывания всех шарнирных ромбов можно рассчитать по формуле:
после подстановки в эти зависимости, например, для фиг. 3 кратности k=5.
Достигаемый в предполагаемом шарнирном подъемнике положительный эффект заключается в упрощении конструкции и трудоемкости изготовления, многократном увеличении высоты подъема подвесного груза точно по вертикали (при заданном малом ходе гидроцилиндра), а также компактности и быстрой складываемости всей замкнутой кинематической цепи привода груза без ее трудоемкой полной разборки и сборки всей конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
Изобретение относится к машиностроению. Складывающийся шарнирный подъемник подвесного груза содержит опорное основание и шарнирный подвес груза, кинематически связанные между собой посредством приводной замкнутой кинематической цепи. Цепь выполнена в виде последовательно расположенных в одной плоскости и соединенных между собой одинаковых шарнирных ромбов. Ромбы составлены из пересекающихся и одинаковых между собой трехшарнирных соединительных рычагов. Шарниры рычагов расположены на одной прямой. Ромб, расположенный на одном конце цепи, кинематически связан с опорным основанием, а на другом конце соединен с шарнирным подвесом посредством двух одинаковых двухшарнирных рычагов. Длина двухшарнирных рычагов равна половине длины трехшарнирных рычагов. Достигается упрощение конструкции, увеличение высоты подъема груза, а также компактность подъемника в его нерабочем положении. 8 з.п. ф-лы, 4 ил.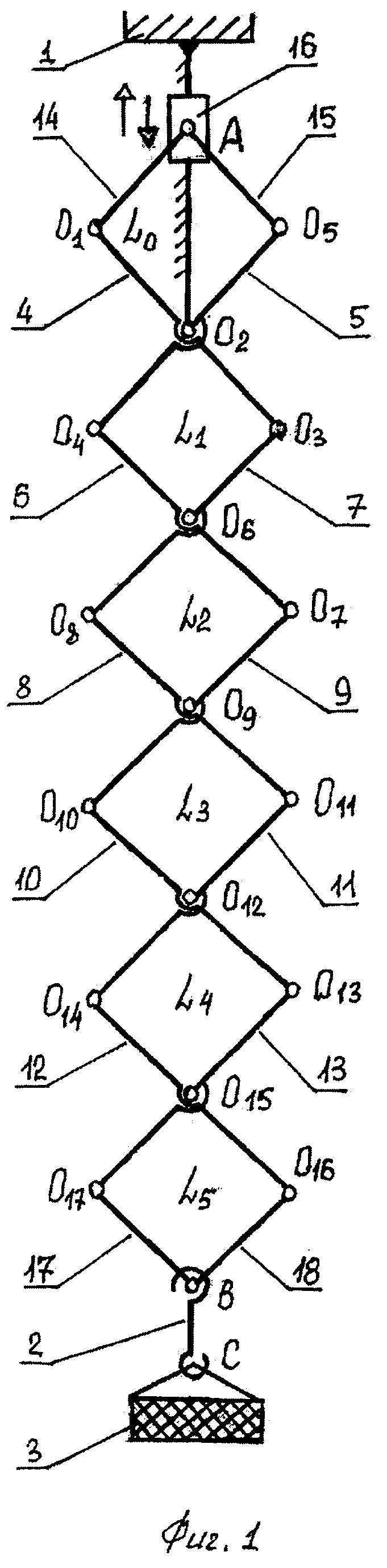
1. Складывающийся шарнирный подъемник подвесного груза, содержащий опорное основание и шарнирный подвес груза, кинематически связанные между собой посредством приводной замкнутой кинематической цепи, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде последовательно расположенных в одной плоскости и многократно соединенных между собой одинаковых шарнирных ромбов, которые составлены из пересекающихся и одинаковых между собой трехшарнирных соединительных рычагов с расположением в каждом из них всех трех шарниров на одной прямой линии, шарнирный ромб, расположенный на одном конце замкнутой кинематической цепи, кинематически связан с опорным основанием посредством двух одинаковых двухшарнирных рычагов, а шарнирный ромб, расположенный на другом конце замкнутой кинематической цепи, соединен с шарнирным подвесом посредством двух одинаковых двухшарнирных рычагов, длина которых равна половине длины упомянутых трехшарнирных соединительных рычагов.
2. Шарнирный подъемник по п. 1, отличающийся тем, что кинематическая связь опорного основания с одним из шарнирных ромбов с одной стороны выполнена в виде установленного на опорном основании приводного ползуна, соединенного с вершиной упомянутого ромба через двойной цилиндрический шарнир, а с другой стороны эта связь выполнена в виде двойного цилиндрического шарнира, соединяющего опорное основание с двумя пересекающимися между собой трехшарнирными соединительными рычагами в точке их пересечения, при этом оба упомянутых двойных цилиндрических шарнира выполнены с параллельными между собой осями вращения для образования стационарного складывающегося подъемника с одной степенью свободы, устанавливаемого, например, на грузовую тележку мостового крана.
3. Шарнирный подъемник по п. 1, отличающийся тем, что кинематическая связь опорного основания с шарнирным ромбом в замкнутой кинематической цепи выполнена в виде двойного цилиндрического шарнира, а упомянутый шарнирный ромб снабжен приводным подвижным гидроцилиндром или пневмоцилиндром, установленным внутри этого ромба по его диагонали и соединенным противоположными вершинами упомянутого ромба через два двойных цилиндрических шарнира с параллельными между собой осями вращения, для образования подвесного складывающегося подъемника с двумя степенями свободы самоустанавливающейся по вертикали кинематической цепи привода подвесного груза.
4. Шарнирный подъемник по п. 1, отличающийся тем, что замкнутая кинематическая цепь привода подвесного груза связана с опорным основанием посредством двухподвижного вращательного устройства с перпендикулярными между собой осями вращения.
5. Шарнирный подъемник по п. 1, отличающийся тем, что замкнутая кинематическая цепь привода подвесного груза связана с опорным основанием через трехподвижную сферическую кинематическую пару.
6. Шарнирный подъемник по пп. 2 и 3, отличающийся тем, что подвесной груз выполнен в виде многопозиционного подвесного схвата, выполненного в виде зажимного шарнирного ромба, внутри которого по его диагонали установлен гидроцилиндр или пневмоцилиндр привода зажимных элементов, которые сблокированы со сторонами упомянутого зажимного шарнирного ромба.
7. Шарнирный подъемник по пп. 1-6, отличающийся тем, что он снабжен подвижным шарнирным соединением подвесного груза с шарнирным ромбом, расположенным на конце замкнутой кинематической цепи и выполненным в виде двухкратно изогнутого крюка.
8. Шарнирный подъемник по пп. 1-6, отличающийся тем, что он снабжен подвижным шарнирным соединением подвесного груза с шарнирным ромбом, расположенным на конце замкнутой кинематической цепи и выполненным в виде двухшарнирного звена.
9. Шарнирный подъемник по п. 2, отличающийся тем, что он снабжен поворотной платформой, выполненной с возможностью полного реверсивного поворота от вращательного двигателя, а опорное основание вместе с шарнирными ромбами привода подвесного груза соединено с этой поворотной платформой через цилиндрической шарнир и кинематически связано с ней посредством приводной винтовой кинематической пары или поворотного гидроцилиндра для образования поворотного складывающегося подъемника с тремя степенями свободы, выполненного с возможностью перемещения подвесного груза под заданным углом β≥0 наклона его траектории к горизонтали.
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| Манипулятор | 1987 |
|
SU1530435A1 |
| Подъемник | 1976 |
|
SU583092A1 |
| Прибор для ловли рыбы | 1932 |
|
SU33770A1 |
| US 5219410 A, 15.06.1993 | |||
| CN 104692262 A, 10.06.2015. | |||

