i
Изобретение относится к строительству и эксплуатации автомобильных дорог, а именно к устройствам для оценки ровности дорожных покрытий при приемке и в процессе эксплуатации автомобильных дорог.
Цель изобретения - расширение информативности контроля путем одновременной оценки продольного и поперечного профиля.
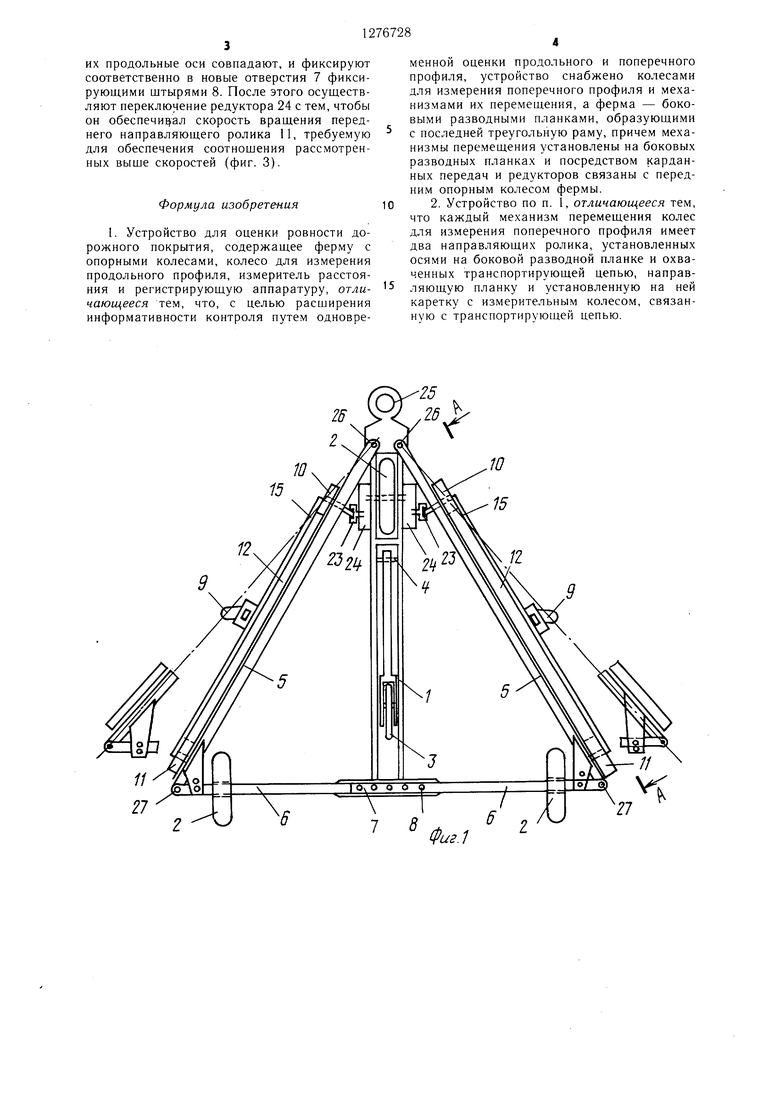
На фиг. 1 представлено устройство, вид сверху; на фиг. 2 - разрез А-А на фиг.
где Утр - скорость транспортировки устройства;Упл-скорость каретки, относительно
боковой разводной планки; а-угол между продольной осью устройства и боковой разводной планкой.
Эта скорость обеспечивается посредством установки соответствующего передаточного числа редуктора 24, передающего вращение
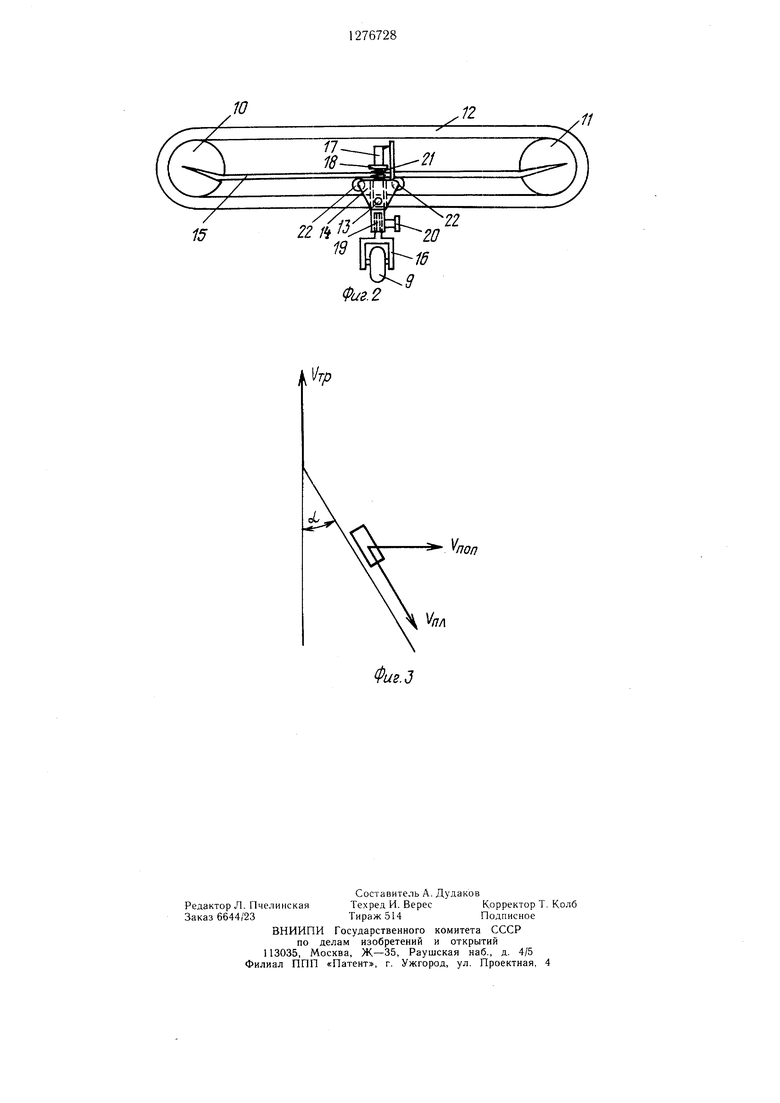
на фиг. 3 - векторная диаграмма переме- 10 от переднего опорного колеса 2 на передние
щения измерительных колес при работе устройства.
Устройство содержит ферму 1 с опорными колесами 2, колесо 3 для измерения продольного профиля, установленное на оси 4, закрепленное на ферме, боковые разводные 5 планки 5.,образующие с фермой треугольную раму, две полуоси 6 задних опорных колес, связанные между собой и с фермой 1 посредством отверстий 7 и фиксирующих штырей 8, колеса 9 для измерения поперечного л профиля, перпендикулярно ориентированные к колесу 3, механизмы перемещения колес 9 для измерения поперечного профиля, каждый из которых имеет два направляющих ролика 10 и 11, установленные осями на боковой разводной планке 5 и охваченные транспортирующей цепью 12, на которой закреплена ось 13 для подвески каретки 14 и направляющей планки 15, жестко закрепленной на боковой разводной нланке 5. Колесо 9 для измерения поперечного профиля закреплено в вилке 16 с вертикальным щто- ком 17, имеющим стопор 18, поворотный узел 19 с фиксатором 20 и пружину 21 и установлено с возможностью вертикального перемещения на каретке 14, снабженной роликами 22. Посредством карданной пере25
30
направляющие ролики 11.
При скорости Упл каретка 14 имеет относительно поперечника к оси полосы движения по направлению транспортирования устройства нулевую скорость, т. е. центр каретки перемещается перпендикулярно к продольной оси полости движения от ее центра к обочине со скоростью
1/поп Vii.i since,
где У.юп - скорость движения каретки по направлению, перпендикулярному к оси полосы движения относительно этой оси.
В процессе движения, когда ось 13 каретки 14, закрепленная на бесконечной транспортирующей цепи 12, проходит в верхней части, каретка 14 под действием собственного веса размещается вертикально. В таком же положении каретка находится в момент огибания цепью переднего направляющего ролика 11. В момент, когда ось 13 каретки 14 подходит к зоне выхода транспортирующей цепи 12 из взаимодействия с передним направляющим роликом 10, первый, а затем и второй ролики 22 каретки 14 вступают во взаимодействие с направляющей пландачи 23 и редукторов 24 механизм переме- 35 ,дд j5, фиксируя положение каретки 14 отщения связан с передним опорным колесом фермы. Позицией 25 показано тяговое кольцо фер.мы. Измеритель расстояния на чертеже не показан. Боковые разводные нлан- ки 5 осями 26 связаны с фермой, а ося- ми 27 - с полуосями опорных колес 2. С колесами измерения продольного и поперечного профиля связаны датчики неровности (не показаны).
Устройство работает следующим о 5разом.
При транспортировании устройства по контролируемому покрытию автомобильной дороги за тяговое кольцо 25 вращение переднего опорного колеса 2 через редукторы 24 и карданные передачи 23 передается на передние направляющие ролики 10, приводящие в движение транспортирующие цепи 12, которые перемещают каретки 14 параллельно осям боковых планок 5. Скорость перемещения каждой каретки 14 составляет (фиг. 3) относительно боковых разводных планок 5
Упл Утр
COSCC
1276728
где Утр - скорость транспортировки устройства;Упл-скорость каретки, относительно
боковой разводной планки; а-угол между продольной осью устройства и боковой разводной планкой.
Эта скорость обеспечивается посредством установки соответствующего передаточного числа редуктора 24, передающего вращение
направляющие ролики 11.
При скорости Упл каретка 14 имеет относительно поперечника к оси полосы движения по направлению транспортирования устройства нулевую скорость, т. е. центр каретки перемещается перпендикулярно к продольной оси полости движения от ее центра к обочине со скоростью
1/поп Vii.i since,
где У.юп - скорость движения каретки по направлению, перпендикулярному к оси полосы движения относительно этой оси.
В процессе движения, когда ось 13 каретки 14, закрепленная на бесконечной транспортирующей цепи 12, проходит в верхней части, каретка 14 под действием собственного веса размещается вертикально. В таком же положении каретка находится в момент огибания цепью переднего направляющего ролика 11. В момент, когда ось 13 каретки 14 подходит к зоне выхода транспортирующей цепи 12 из взаимодействия с передним направляющим роликом 10, первый, а затем и второй ролики 22 каретки 14 вступают во взаимодействие с направляющей план,дд j5, фиксируя положение каретки 14 от
носительно боковой разводной планки 5. При последующем движении транспортирующей цепи 12 колесо 9 для измерения поперечного профиля перемещается поперек полосы движения со скоростью Упоп. В процессе движения колесо 9, наезжая на неровности, перемещает вертикальный щток 17. Фиксация этих перемещений позволяет регистрировать неровности покрытия по поперечникам, перпендикулярным к продольной оси полосы движения. Возврат штока осуществляется пружиной 21.
При переходе на измерение неровностей на полосах движения большей ширины устройство трансформируется следующим образом.
Фиксирующие штыри В извлекают из отверстий 7 полуосей 6 задних опорных колес 2, боковые разводные планки 5 раздвигают вокруг осей 26 на угол, при котором общее расстояние между вертикальными осями задних опорных колес 2 соответствует ширине оцениваемой полосы движения, полуоси задних опорных колес также поворачивают вокруг осей 27 на угол, при котором
их продольные оси совпадают, и фиксируют соответственно в новые отверстия 7 фиксирующими штырями 8. После этого осуществляют переключение редуктора 24 с тем, чтобы он обеспечи ал скорость вращения переднего направляющего ролика 11, требуемую для обеспечения соотнощения рассмотренных выше скоростей (фиг. 3).
Формула изобретения
1. Устройство для оценки ровности дорожного покрытия, содержащее ферму с опорными колесами, колесо для измерения продольного профиля, измеритель расстояния и регистрирующую аппаратуру, отличающееся тем, что, с целью расширения информативности контроля путем одновре
меннои оценки продольного и поперечного профиля, устройство снабжено колесами для измерения поперечного профиля и механизмами их перемещения, а ферма - боковыми разводными планками, образующими с последней треугольную раму, причем механизмы перемещения установлены на боковых разводных планках и посредством карданных передач и редукторов связаны с передним опорным колесом фермы.
2. Устройство по п. 1, отличающееся тем, что каждый механизм перемещения колес для измерения поперечного профиля имеет два направляющих ролика, установленных осями на боковой разводной планке и охваченных транспортирующей цепью, направляющую планку и установленную на ней каретку с измерительным колесом, связанную с транспортирующей цепью.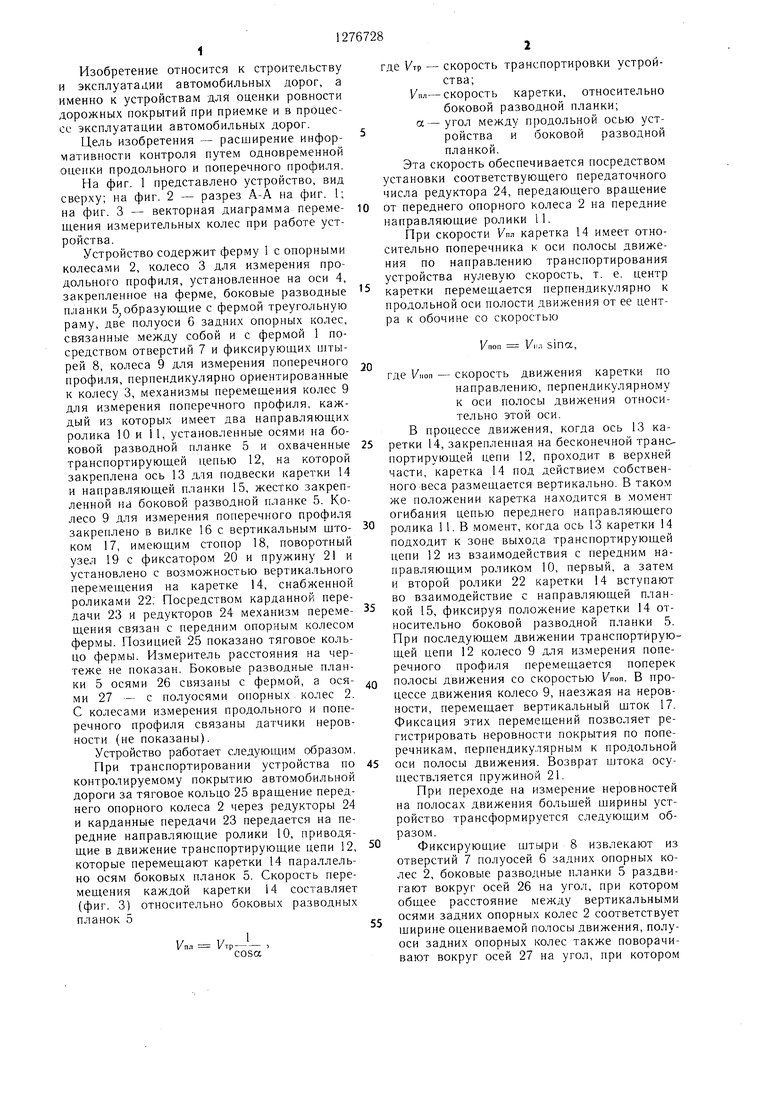
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки ровности дорожного покрытия | 1988 |
|
SU1513067A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1990 |
|
RU2032294C1 |
| ТЕПЛИЧНАЯ АГРОСИСТЕМА | 1993 |
|
RU2050087C1 |
| СТАН ДЛЯ ПОПЕРЕЧНО-КЛИНОВОЙ ПРОКАТКИ | 1996 |
|
RU2124958C1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Транспортное средство для перевозки длинномерных грузов | 1989 |
|
SU1668179A1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| МОСТОВАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ ПЛАТФОРМА "СОТКА" | 1999 |
|
RU2199195C2 |
| Пожарный мотоцикл грунтомет, дисковый кусторез, пластинчатый кусторез, гидропневматическая шина | 2020 |
|
RU2760386C2 |
Изобретение относится к области строительства и эксплуатации автомобильных дорог, а именно к устройствам для оценки ровности дорожных нокрытий при приемке и в процессе эксплуатации автомобильных дорог. С целью расширения информативности контроля путем одновременной оценки продольного и поперечного профиля, устройство содержит ферму и опорными колесами и с боковыми разводными планками, образующими треугольную раму, колеса для измерения профилей и механизмы их перемещения. I з. п. ф-лы, 3 ил. 05 го 00
15
25
vr
27
Фиг.1
10
.12
/ 15
Фиг. 2
У
лоп
| Прибор для определения неровности дорожных покрытий | 1973 |
|
SU498387A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 916643, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
