Изобретение относится к вычислительной технике и может найти применение в системах автоматического управления нестационарными объектами с быстрым дрейфом характеристик при наличии неконтролируемых возмущений на входе;
Известна самонастраивающаяся система для регулирования объектов с запаздыванием, содержащая эталонную модель, объект регулирования, блок сравнения, первый умножитель, усилитель, интегратор, второй умножитель, блок задержки, третий умножитель , второй усилитель, второй интегратор и четвертый умножительCl .
Недостатком этой системы является невысокие точность и быстродействие при управлении существенно нестационарными объектами.
Наиболее близком по технической сущности к предлагаемой является система автоматического управления, содержащая объект управления и модель объекта управления, подключенные выходами к входс1м первого-сумматора, второй, третий, четвертый сумматоры и регулятор, первые выходы которого соединены с соответствующими входами модели и объекта управлени/тС2 .
Недостатком этой системы является невысокая помехоустойчивость при произвольном законе распределения пос мехи и недостаточно высокое быстродействие, объясняющееся отсутствием возможности коррекции модели по мере изменения параметров объекта и задающего воздействия.
Q Цель изобретения - повышениепомехоустойчивости и быстродействия системы при управлении нестационарными объектами.
Указанная цель достигается тем, 4г что в адаптивную систему управления, содержащую объект управления и модель объекта управления, подключенные выxoдa tи к входам- первого сумматора, второй, третий, четвертый сумматоры и регулятор, первые выходы которого
20 соединены с соответствующими входами модели и объекта управления, введены блок выпрямителей,последовательно соединенные релейный блок, первый блок умножения и первый блок деления,
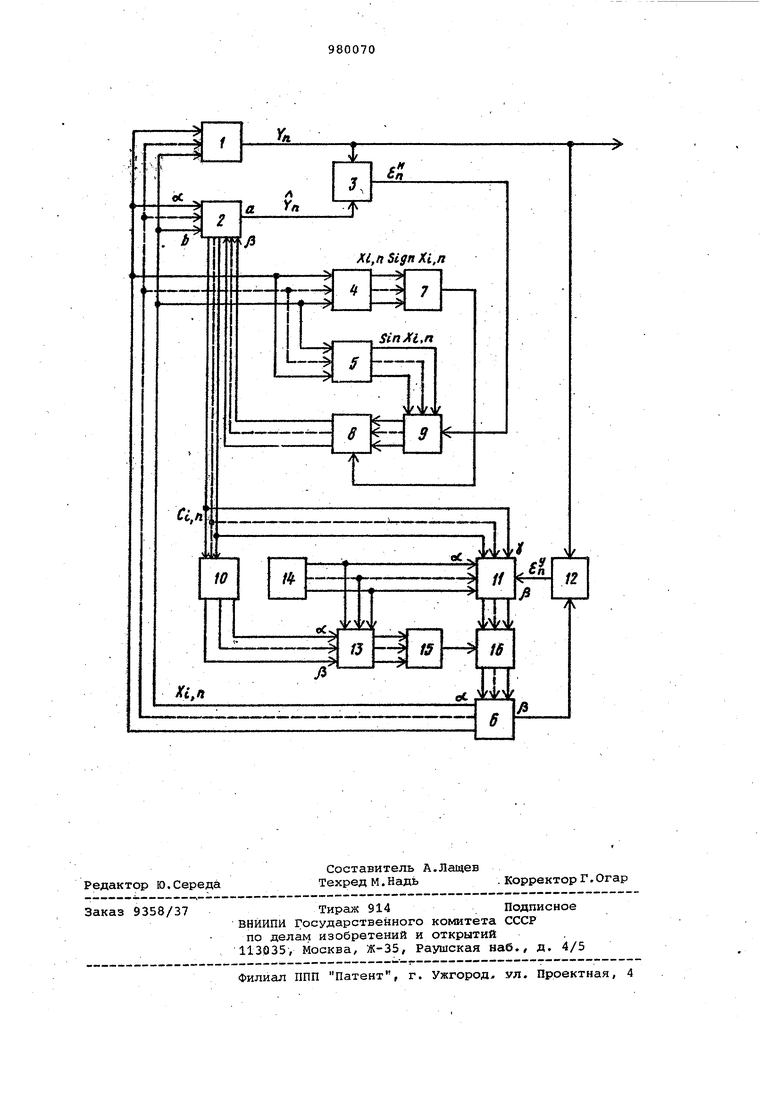
25 последовательно соединенн ле квадратор и второй блок умножения и последовательно соединенные блок задания весовых коэффициентов, третий блок умножения и второй блок деления, вы30ходы которого соединены с соответСТВУЮ1ЦИМИ входами регулятора, вторым выходЬм подключенного через третий сумматор к второму входу третьего блока умножения, третьи входы которого соединены с соответствующими входами квадратора и вторыми выходами модели объекта управления, первыми входами подключенной через последовательно соединенные блок выпря мителей и второй сумматор к второму входу первого блока деления, выходы которого -соединены с соответствующим вторыми входами модели объекта управления , второй вход третьего сумматора соединен с выходом объекта управления, вторые входы второго бло ка умножения соединены с соответствующими выходами блока задания весовых коэффициентов, а выходы через четвертый сумматор - с вторым входом второго блока деления, выход первого сумматора соединен с вторым входом первого блока умножения. Введение дополнительно блоков и их подключение позволяет образовать контуры идентификации и управления. Последний минимизирует рассогласование между задающим воздействием и вы ходом объекта управления, т.е. умень шает ошибку идентификации и ошибку управления и тем самым делает систему адаптивной. На чертеже изображена блок-схема предлагаемой адаптивной системы управления для варианта нестационарного многомерного объекта управления с m-входами и одним выходом. Система управления содержит объект 1 управления и модель 2 объекта управления, подключенные выходами к входам первого сумматора 3. Входы объекта 1 .управления и первые входы Cot ) модели 2 объекта управления сое динены с входами блока 4 выпрямителей и релейного блока 5 и первыми выходами ( ot) регулятора б. Выходы блока 4 выпрямителей подключены через второй сумматор 7 к входу делителя первого блока 8 деления. В ходы релейного блока 5 подключены к входам первого блока 9 умножения. другой вход которого соединен с вых дом первого сумматора 3. Выходы пер вого блока 9 умножения подключены к входам делимого первого блока 8 д ления, выходы которого подключены к вторым входам (/Ь) модели 2 объекта управления. Вторые выходы {)J;MOдели 2 объекта управления подключены к входам квадратора 10 и третьим входам ( ) третьего блока 11 умножения , второй вход ( р) которого сое динен с выходом третьего сумматора 1 Входы последнего подключены к выход объекта 1 управления и второму выхоЯУ Ч Р регулятора 6. Первые входы (ct) третьего блока 11 умножения подключены к первым входам (ot) второго блока 13 умножения и выходом блока 14 задания весовых коэффициентов. Вторые входы () второго блока 13 умножения подключены к выходам квадратора 10, а его выходы - к четвертому сумматору 15, выход последнего Ьоединен с входом делителя второго блока 16 деления. Выходы третьего блока 11 умножения подключены к входам делимого второго блока 16 деления, а выходы последнего соединены с входамирегулятора 6. . Система работает следующим обра-зом. С выходов объекта 1 управления и модели 2 объекта управления сигнала о реакции объекта 1 .Vp и модели 2 f, подаются на входы первого сумматора 3, который вычисляет ошибку идентификации 6 9р. На . входы объекта 1 управления и на первые входы (ot J модели 2, а также на входы блока 4 выпрямителей и релейного блока 5 подается информация о входном воздействии х, (х,х . . . ,) с первых вккодов ( ct) регулятора 6. Этот сигнал в блоке 4 выпрямителей выпрямляется, т.е. вычисляется вектор mnS4 mn).3 релейном блоке 5 преобразуется к виду 51(уПХп (S«fn ,St(fn Xj, . . . ,)t Выпрямленный входной сигнал подается на входы второго сумматора 7, который, суммируя компоненты выпрямленного входного сигнала, вычисляет тtn скалярную величину Xj sl«yn х 111|х „| 1Jкоторая далее подается на вход дeлитe я первого блока 8 деления. Сигнал с выхода релейного блока 5 подается на входы первого блока 9 умножения, на другой вход которого подается ошибка идентификации ejj ; в результате операции умножения в первом блоке 9 умножения вычисляется BeKTop{6|Js4nx „,-, ЕП x)J который подается на входа делимого первого блока 8 деления. В результате деления вычисляются корректирую-, щие добавки коэффициентов, которые подаются на вторые входы (и - входы настройки коэффициентов ) модег ли 2, в результате чего в модели 2 осуществляется подстройка коэффициентов модели 2 согласно алгоритму р р .п п . SinS-. 5щп X. , . . ,l«i,nl Таким образом, модель 2, первый сумматор 3, блок 4 выпрямителей, релейный блок 5, второй сумматор 7, пГервый блок 8 деления и первый блок 9 умножения образуют контур иденти-. фикации, который осуществляет настройку изменяющихся коэффициентов объекта 1 управления. С вторых выходов (Ь)модели 2 (выходы коэффициентов) вычисленные значения коэффициентов С},пподаются на входы квадратора 10 и третьи входы .(у) третьего блока 11 умножения. На основе информации, поступающей с выхода объекта 1 управления и с второго выхода ((ъ) регулятора 6 в третьем сумматоре 12 вычисляется ошибка управления jl , которая под ется на второй вход fi) третьего бл ка 11 умножения. На первые входы (oL .третьего блока 11 умножения и на rie вые входы (ot) второго блока 13 умно жения с выходов блока 14 задания % весовых, коэффициентов подаются сиг.Нсшы обратно пропорциональные стоимости входных.воздействий - сс . На основании поступающей информации в третьем блоке 11 умножения вычисляются величины .с.,, а во второ .блоке 13 умножения, вторые входы ({Ь которого подключены к выходам квад,ратора 10 - величины , с четв том сумматоре 15, входы которого подключены к выходам второго блока 13 умножения, осуществляется суммирование компонентов с., в результате чего на его выходе появляется скалярная величина « с IKO ( J J торая подается на .вход делителя вто iporo блока 16 деления. На входы делимого второго блока 16 деления поIдается информация с выхода третьего ;блока 11 умножения, в результате деления вычисляется корректирующее . воздействие по управлению m которое подается на входы регулятора который по перв1а л выкодм (oL) , вы.числяет управлений в виде . i.n Ч, .n tn Таким образом, квадратор 10, тре тий блок 11 умножения, третий сумматор 12, второй блок 13 умножения, блок 14 задания весовых коэффициентов , четвертый сумматор 15 и второй блок 16 деления образуют контур управления, минимизирующий рассогласо ваниемежду задающим воздействием ч и выходом объекта jf,. В качестве.примера рассмотрим .следующее. Пусть объект описывается уравнением ; « V c х.(1) 7й J j. где Чп отклик объекта на л-м такте;Хп- 1- мерный вектор входных оздействий; m - мерный вектор еизвестных коэффициентов объекта правления. Модель 2 может быть адана уравнением Т vi4 }r,S-.n-ij.n. 2; где п отклик модели;С -m - мерный вектор настраиваемых коэффициентов модели. В общем случае отклонение выхода модели от заданного значения выходной величины можно записать следующим образом , (3) 6(С -Cj,x - ошибка идентигдефикации;ej| ( -Хр)С„. - ошибка управления. , Меру качества идентификации можно характеризовать некоторым критерием близости координат модели и объекта р(С,С), являющимся функцией от ошибки идентификации Е В практике и теории идентификации наибольшее распространение получил квадратичный критерий, однако известно, что оценки коэффициентов, полученные с помощью этого критерия, критичны к виду функции распределения помех. Таким образом, система идентификации, работающая по минимуму квадратичной ошибки, не является помехоустойчивой на широком классе функций распределения помех. Применение модульного критерия вида 1(е,с)) (4) позволяет получить эффективные оценки для широкого класса помех. Несложно показать, что алгоритм идентификации,минимизирующий критерий (4 ), имеет вид Wi-x slLVx. .g -1 где 5ЧП Xn( „. х „,.--, , 0при |х,| d 1при Х; „ С/ «in Ошибку управления Е целесообразно . компенсировать, исходя из минимума энергетических затрат. Если для изменения ьыходной переменной на л требуется изменение входного вектора на дх „+ , т.е. . то соответствующая энергетическая норма будет иметь вид .+iA4Jl,i, (} & :f --J, A - матрица стоимости управля и|их воздействий (весов). Практический интерес представляет случай,,когда А диагональная Таким образом, задача нахождения оптимального закона изменения дх„ может быть сформулирована как задача минимизации нормы ( 1) при ограничениях ( б), Введя функцию Лагранжа (п+.ЬЦЛХ. (ЛУ„-С;Й Х„,,}, 18 где А - неопределенный множител Лагранжа, условием экстремума кот рой является д) ,; ,,,-ДС„ 0 (3) (Э(дХп+ Зи(/ЗХ„,А) д:;„-сдх, ЭЛ нетрудно получить, что искомый за кон управиения будет иметь вид сТд-Ч. п (Л где матрица обратная А. Полное изменение i-го компо та входного вектора с учетом диа нальности матрицы стоимости А за шется следующим образом .с. л1 1,п -,,.. Несложно показать, что данный алгоритм является оптимальным по родействию. Таким образом, адаптивная сис управления реализует следующий п хоустойчивый алгоритм управления стационарным объектом .n Блок идентификации, реализуя вую составляющую алгоритма (13), обеспечивает слежение за изменяю щимися параметрами объекта управ °С i т.е. обеспечивает стремле к нулю % р . Вторая составляющая ритма (13 обеспечивает компенса ошибки управления Таким образом, обшая ошибка (3J в результате работы,системш стремится к нулю с максимально возможной скоростью. , В исходном состоянии коэффициенты модели 0 на выходах (ot) регулятора б 0, выходе регулятора б ( ft} - нуль. В первьгй момент времени h 1, на выходах (oL) регулятора 6 появляются управляющие воздействия х на выходах блока 14 задания весовых коэффициентов - сигналы ci-;J . Воздействия .х подаются на входы объекта 1 управления, модели 2, блока 4 выпрямителей, релейного блока 5. На основе реакции объекта 1 управления -у и модели 2 5 0 в контуре идентификации ( блоки 2,3,4, 5,7,8,9) вычисляются оценки коэффициентов модели М -ШStcynx., которые устанавливаются в модели 2 и по ее вторым выходам (Ь) подаются на входы квадратора 10 и третьего блока 11 умножения. По истечении времени идентификации t на выходе ((ъ; регулятор а б появляется сигнал задающего воздействия v , который может быть как постоянным, так и некоторой функцией времени, программно реализуемой регулятором б. В частном случае задающее воздействие v может задаваться не регулятором б, а вручную. В течение периода управления t в контуре управления вычисляется управляющее воздействие -1-Ч. i, По истечении периода т на выходе (fi) регулятора б вновь появляется нуль, а воздействие х,-, подается на входы объекта управления и модели 2. Реакция объекта 1 управления 2 Модели служит исходной информацией для вычисления коэффициентов 1 . с,-,а ,a IHii которые через время (T -ftjHt,подаются на входы квадратора 10 и третьего блока 11 умножения, а на выходе (fi) регулятора б . вновь появля 2тся -у . По истечении времени 2()вычисляется управляющее воздействие ЧЭ ч,П«;с, j J J.V
Далее итерации осуществляются аналогично, .причем в моменты времени работает контур идентификации, а в моменты времени )() работает контур ynga Bления, где о момент начала работы системы,
Таким образом, предлагаемая адаптивная система управления является техническим воплощением: идеи дуального управления. Технические преимущества использования сщаптивной модели, подстраивакяцейся к изменяющимся характеристикам, объекта управления, и помехоустойчивых оптимальных алгоритмов настройки модели и коррекции управляющего воздействия - в том/ что они позволяют с высокой точностью и быстродействием осуществлять управление нестационарными объектами управления в условиях действия помех.
Предлагаемая система может быть, реализована в виде набора идентичных блоков, выполненных на современных унифицированных аналоговых или цифровых элементах, нггпример, на операционных усилителях, регистрах и т,д.
Предлагаемая система может быть использована на предприятиях химической, нефтехимической и других отраслях прокьшшенности с непрерывным и дискретным характером производственных процессов, характеризующихся многомерностью, нестационарностью и зашумленностью входных и выходных .воздействий.
Ожидаемый технико-экономический эффект от использования предлагаемой системы в технологическом процессе абсорции-дистилляцни содового производства составит 25 тыс.руб в год за счет снижения расходов на 1 т воды: пара на 0,05 Гкал, электроэнергии на 0,06 кВт-ч, очищенного рассола на 0,018 м, извести на 0,1 кг и др. реагентов, что даст снижение себестоимости готовой продукци
на 0,05 руб./т.
Формула изобретения
.Адаптивная система управления, содержащая объект управления и модель
объекта управления, подключенные выходами к входам первого сумматора, второй, третий, четвертый сумматоры и регялтор, первые выходы которого соединены с соответствующими входами модели и объекта управления, отличающаяся тем, что, с целью повышения быстродействия и помехоустойчивости систеьш, она содержит блок выпрямителей, последовательно соединенные релейный блок, первый блок умножения и первый блок деления, последовательно соединенные квадратор и второй блок умножения и последовательно соединенные блок задания весовых коэффициентов, третий
5 блок умножения и второй блок деления, выходы которого соединены с соответствукнцими входгши регулятора, вторым выходом подключенного через третий сумматор к второму входу третье0го блока умножения, третьи входы ко торого соединены с соответствующими входами квадратора и вторыми выходами модели объекта управления, первыми входами подключенной через последова-г
5 тельно соединенные блок выпрямителей второй сумматор к второму входу первого блока деления, выходы которого соединены с соответствующими вто1рыми входами модели объекта управле0ния, второй вход третьего сумматора соединен с выходом объекта управления , вторые входы второго блока умножения соединены с соответствующими выходами блока задания весовых
5 коэффициентов, а выходы через четвертый сумматор - с втормм входом вто-. рого блока деления, выход первого сумматора соединен с вторым входом первого блока умножения.
0
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
5 634235, кл. G 05 В 15/00,41978.
2.Авторское свидетельство СССР I 591821, кл. G 05 В 17/02, 1978.
(прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| Адаптивная система управления | 1983 |
|
SU1136110A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Регулирующее устройство | 1980 |
|
SU928301A1 |
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| Адаптивный экстраполятор | 1982 |
|
SU1042031A1 |