(Л
с
4
4
СО СП
1риг.1
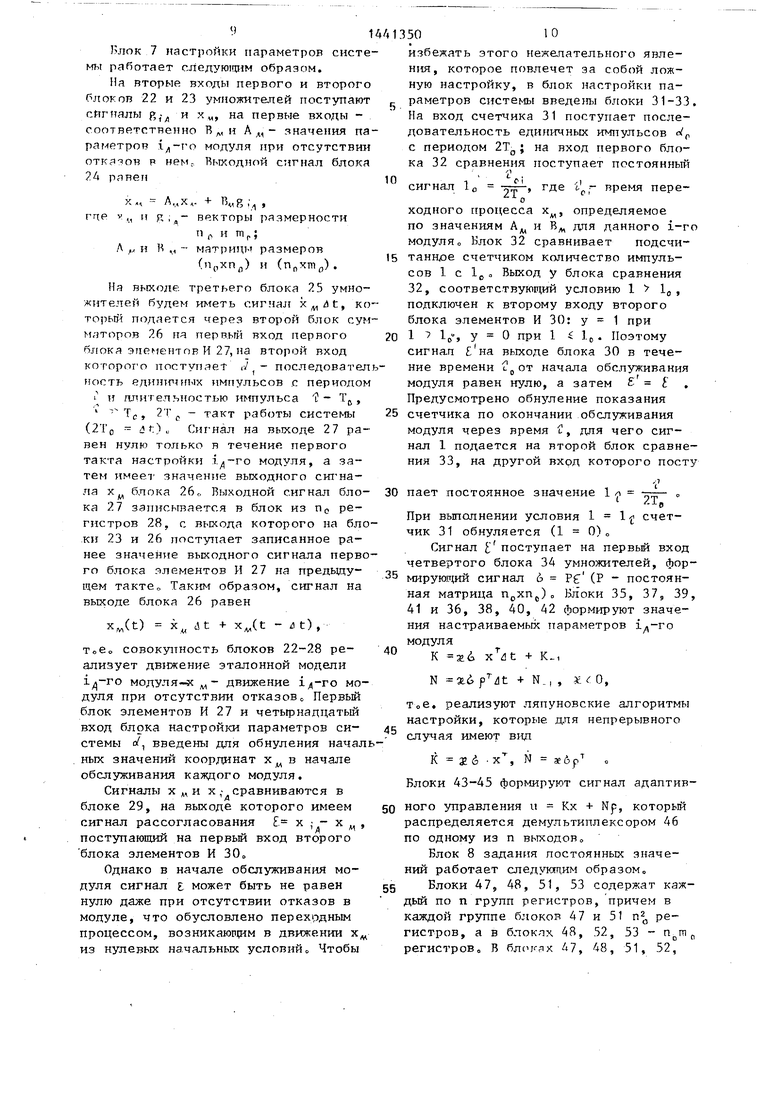
дилгност И1) . Адяитнпная диагнос- тичег.кая система еодержит обьект управления 1, группу 2 из п блоков Т1змкрите.л«й ныхолного сигнала, группу 3 нз п блоков измерителей входного сигнала, первьй ft, второй 5 и третий 6 мультиплексоры, блок 7 настройки параметров системы, блок 8 задания постоянных значений, блок 9 памяти, первый К) и второй 11 элементы И, блок 12 принятия решений об отказе, блок 13 распределения сигналов, блок 14 индикашш, группу из m блоков 15 формирования сигнала управления, группу из m демультиплексо- ров 16, первую и вторую группы из п элементов ИШ 17 и 19, группу из п элементов И 1R, группу из п блоков умножителей 20 и блок -21 управления. 2 з.п. ф-лы, 8 ил.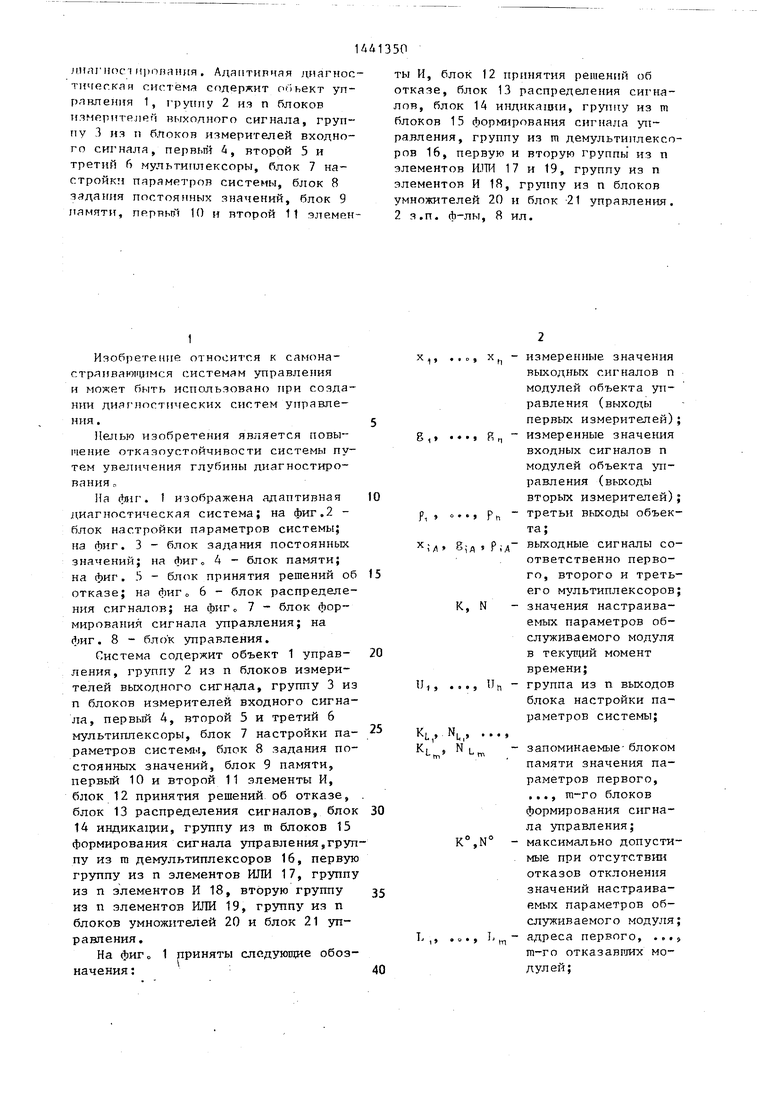
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТКАЗОУСТОЙЧИВЫЙ МУЛЬТИМИКРОКОНТРОЛЛЕР | 1999 |
|
RU2156492C1 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 2000 |
|
RU2198417C2 |
| Модуль однородной вычислительной структуры | 1987 |
|
SU1495809A1 |
| РАСПРЕДЕЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1997 |
|
RU2122229C1 |
| Устройство для умножения | 1985 |
|
SU1305667A1 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 2000 |
|
RU2185656C2 |
| Устройство для вычисления матрицы функций | 1987 |
|
SU1439617A1 |
| Устройство для вычисления матрицы функций | 1987 |
|
SU1439618A1 |
| Устройство для деления | 1984 |
|
SU1242935A1 |
| Распределенная система для программного управления с мажоритированием | 1990 |
|
SU1727112A1 |

Изобретение относится к самонастраивающимся системам управления и может быть использовано при создании диагностических систем управления. Целью изобретения является повышение отказоустойчивости системы управления путем увеличения глубины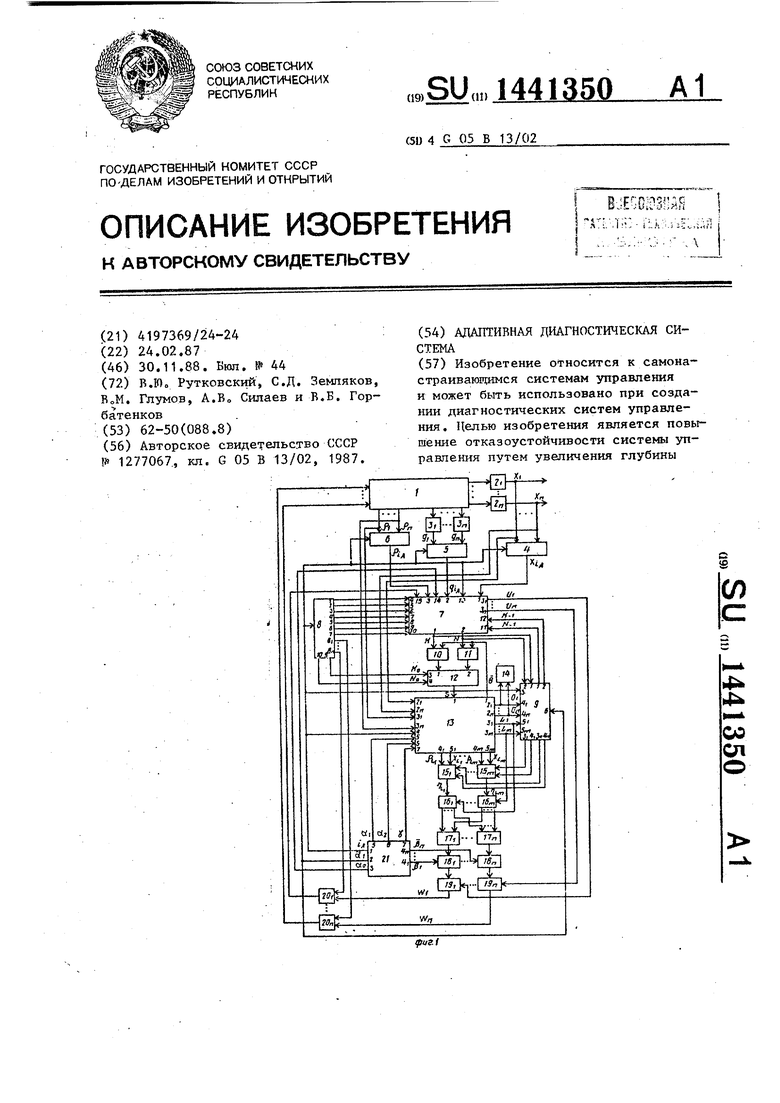
1
Изобретение относится к самона- стряиваю1цимся системам управления и может быть использовано при создании диагностических систем управления .
Целью изобретения является повышение отказоустойчивости системы путем увеличения глубины диагностирования;,
На tor. 1 изображена адаптивная диагностическая система; на фиг.2 - блок настройки параметров системы; на фиг. 3 - блок задания постоянных значений; на фиг« 4 - блок памяти; на фиг. 5 - блок принятия решений об отказе; на фиг„ 6 - блок распределения сигналов; на фиг о 7 - блок формирования сигнала управления; на фиг. 8 - блок зшравления.
Система содержит объект 1 управ- ления, группу 2 из п блоков измерителей выходного сигнала, группу 3 из п блоков измерителей входного сигнала, первый 4, второй 5 и третий 6 мультиплексоры, блок 7 настройки па- раметров систем -, блок 8 задания постоянных значений, блок 9 памяти, первый 10 и второй 11 элементы И, блок 12 принятия решений об отказе, блок 13 распределения сигналов, блок 14 индикации, группу из m блоков 15 формирования сигнала управления,группу из га демультиплексоров 16, первую группу из п элементов ИЛИ 17, группу из п элементов И 18, вторую группу из п элементов ИЛИ 19, группу из п блоков умножителей 20 и блок 21 управления.
На фиг о 1 приняты слйдуюпще обозначения :
х, ..о, х, - измеренные значения выходных сигналов п модулей объекта управления (выходы первых измерителей);
5, R п измеренные значения входных сигналов п модулей объекта отравления (выходы вторых измерителей);
р , о.., р - третьи выходы объекта;
8,-А5р,-д выходные сигналы соответственно первого, второго и третьего мультиплексоров; К, N - значения настраиваемых параметров обслуживаемого модуля в текущий момент времени;
DI, ..., Uft - группа из п выходов блока настройки параметров системы;
KL
KL j, N L запоминаемые- блоком памяти значения параметров первого, ..., т-го блоков формирования сигнала управления;
К°,№ - максимально допустимые при отсутствгш отказов отклонения значений настраиваемых параметров обслуживаемого модуля;
L ,, .., адреса первого, ..., т-го отказавших модулей;
о ) V/
Or,,
в выходные сигналы блока распределения сигналов;
fu, fiJ с.
,.
и 1u,.
.
N,.- значения настраиваемых параметров обслуживаемого модуля в предыдущий момент времени.
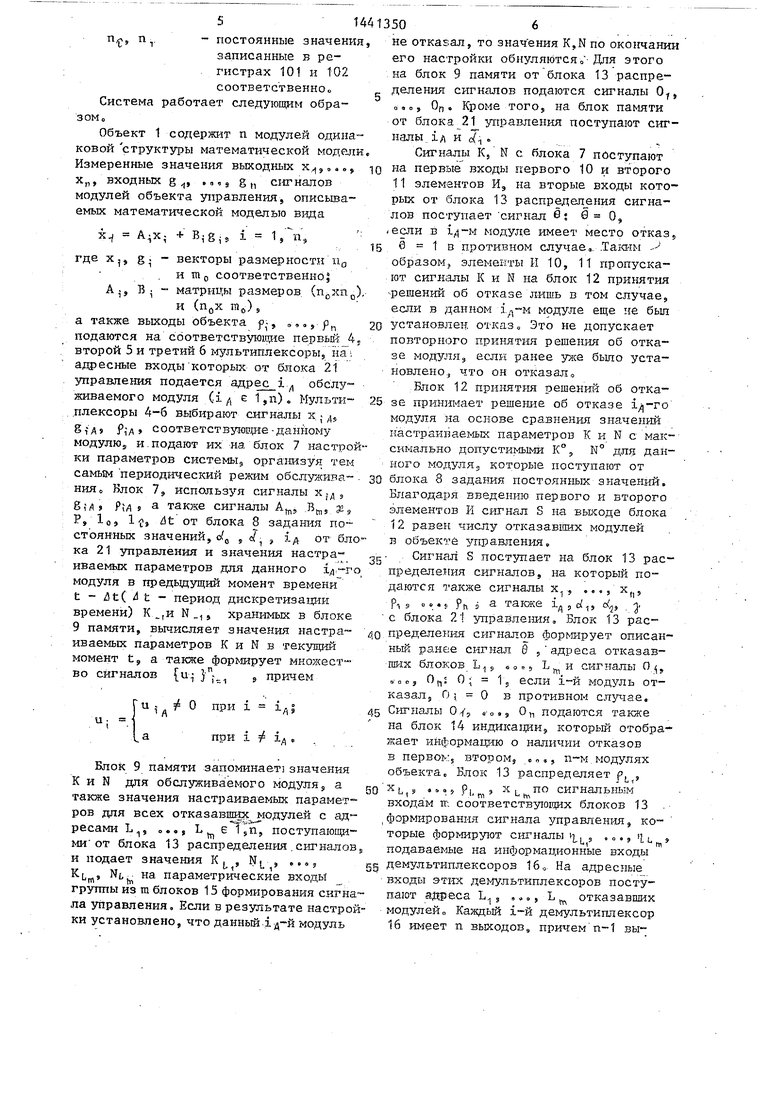
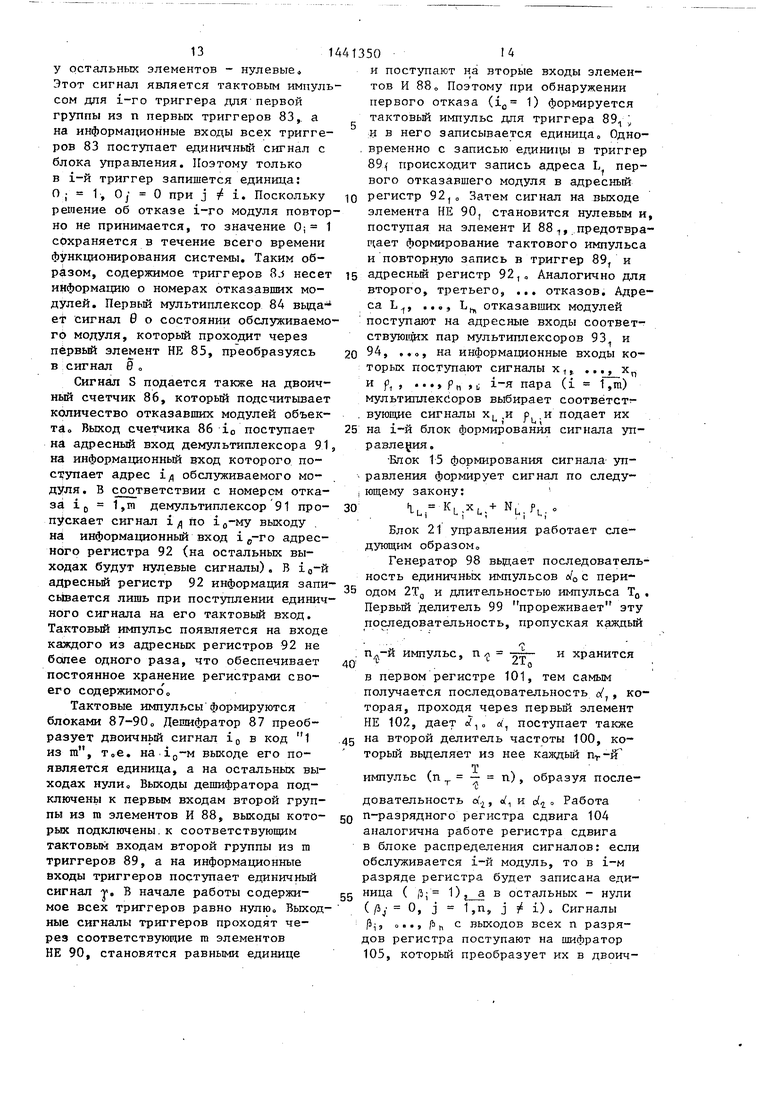
Блок 8 задания постоянных значений содержит (фиг. 3) первьй - седьмой блоки 47-53 регистров, первый т-го блоков формиро- ю ой мультиплексоры 34-59, восьмой вания сигнала управ- 60 регистров, девятый 61 и десятый 62 регистры,
выходные и выходные сигналы первого, .,
W
W.K 1 А ления;
выходные сигналы второй группы элементов ИЛИ;
адрес обслуживаемого в данный момент модуля;
15
На фиг. 3 обозначены В , ..., Вд - п выходов блока 8.
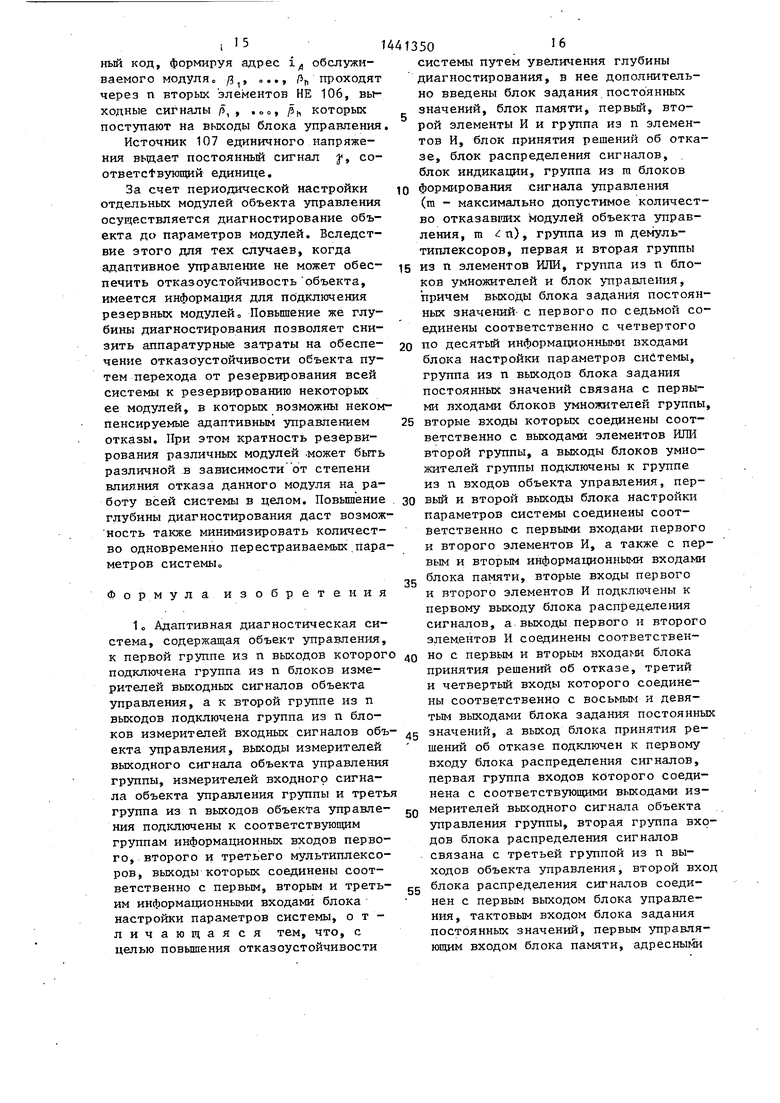
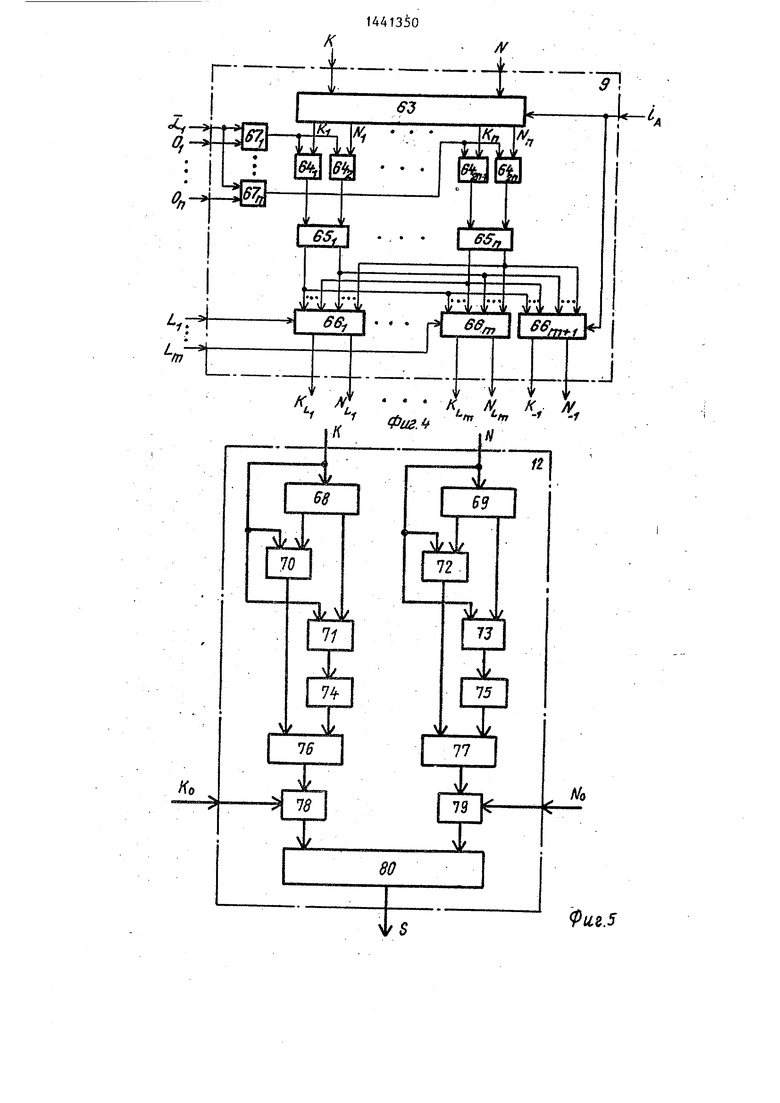
Блок 9 памяти содержит (фиг. 4) групповой демультиплексор 63, группу 64 из 2п элементов И, группу 65 из п блоков регистров, группу 66 из m + 1-групповых мультиплексоров, груп пу 67 из п элементов ИЛИ,
« о i 1
Ai
г
о у
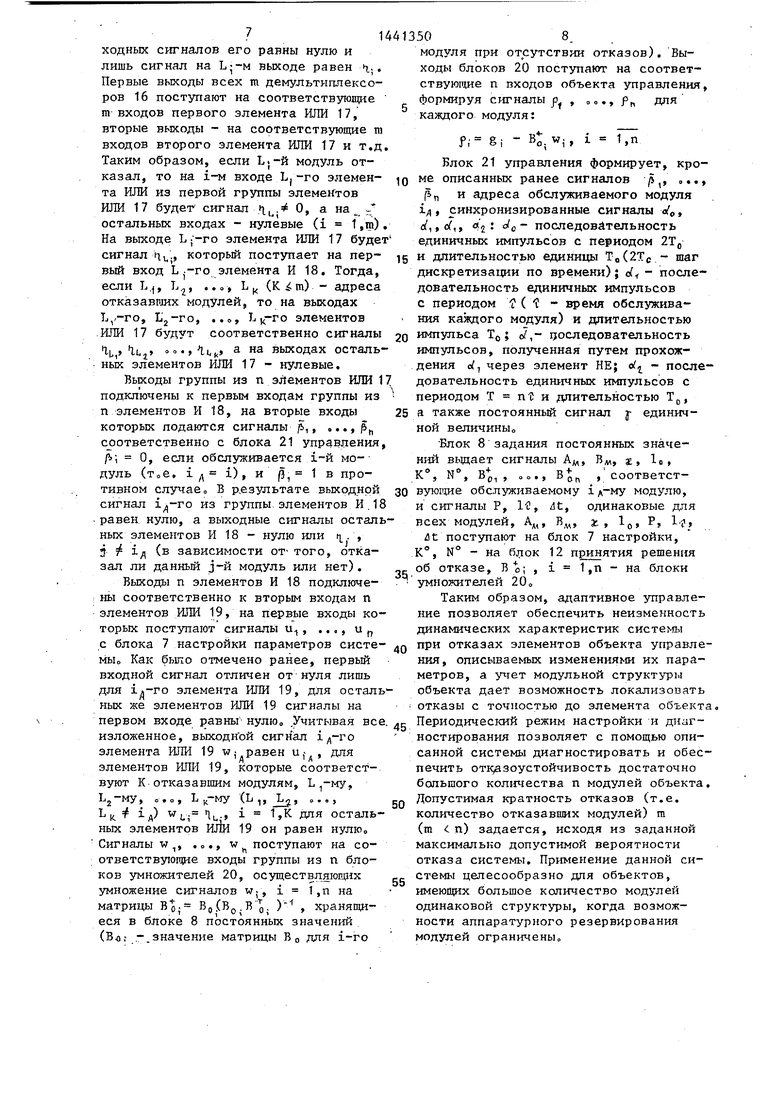
/bfi - выходные сигналы блока управления.
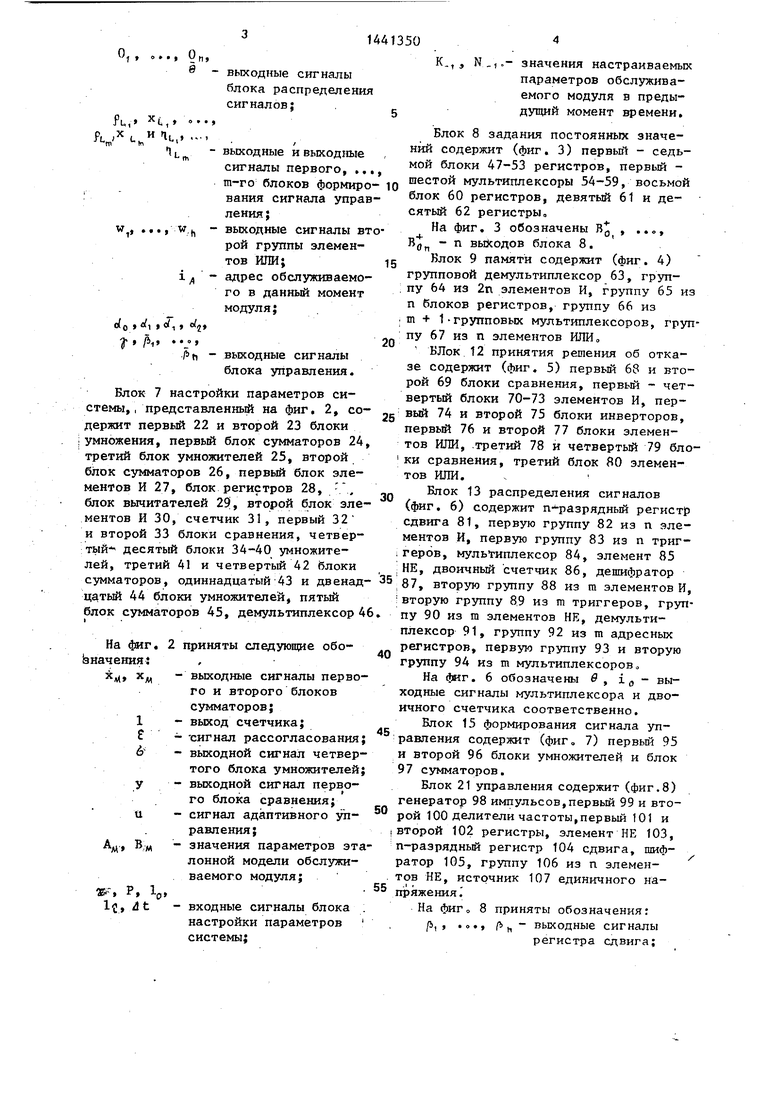
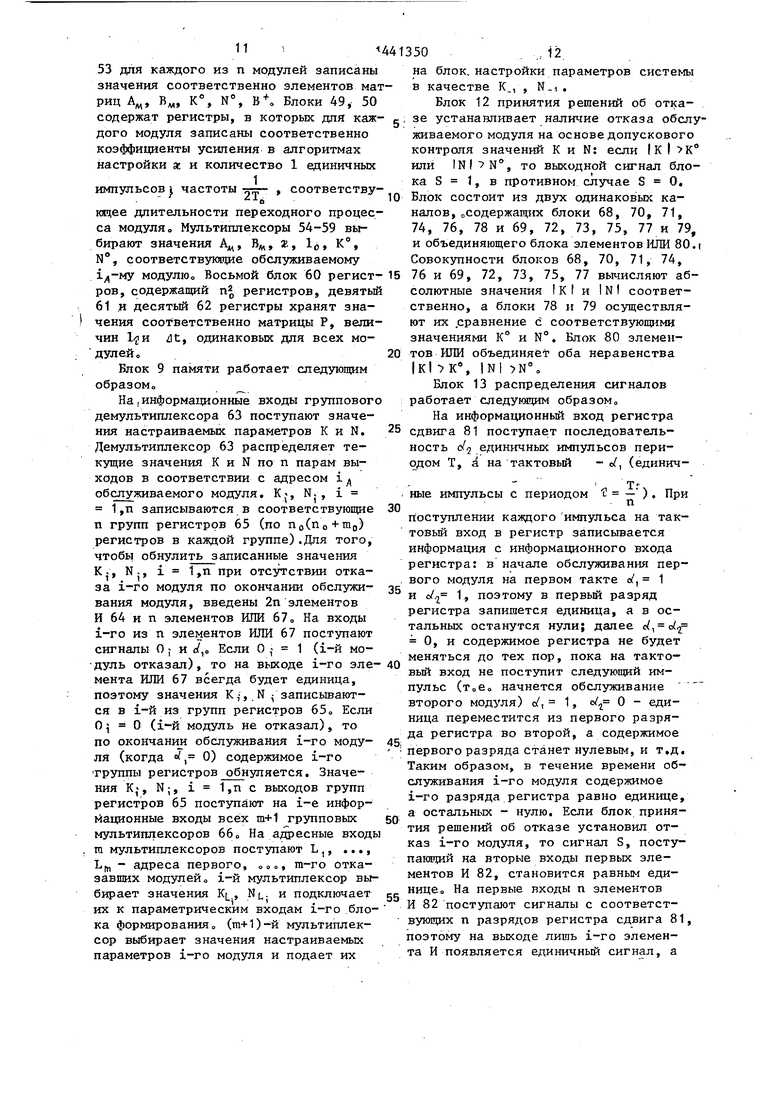
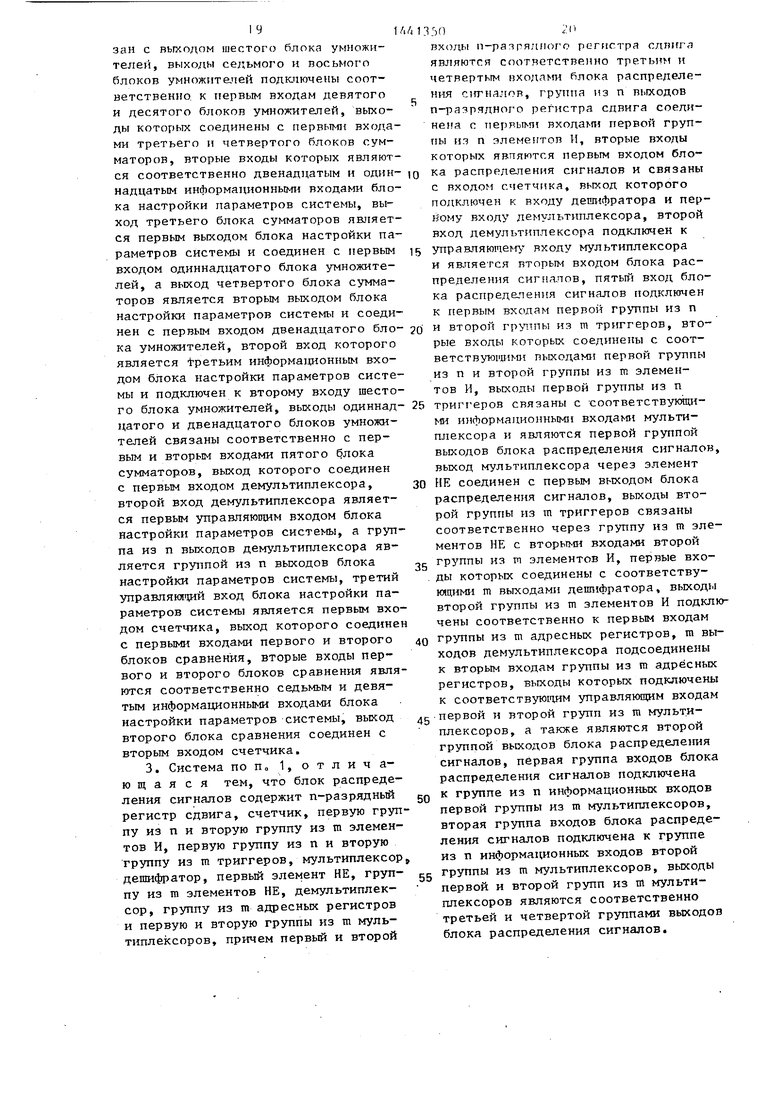
Блок 7 настройки параметров системы, , представленньй на фиг. 2, содержит первый 22 и второй 23 блоки I умножения, первый блок сумматоров 24, третий блок умножителей 25, второй блок сумматоров 26, первый блок элементов И 27, блок регистров 28, , блок вычитателей 29, второй блок элементов И 30, счетчик 31, первый 32 и второй 33 блоки сравнения, четвертый- десятый блоки 34-40 умножителей, третий 41 и четвертый 42 блоки
20
Блок 9 памяти содержит (фиг. 4) групповой демультиплексор 63, группу 64 из 2п элементов И, группу 65 из п блоков регистров, группу 66 из m + 1-групповых мультиплексоров, группу 67 из п элементов ИЛИ,
БЛок 12 принятия решения об отказе содержит (фиг. 5) первый 68 и второй 69 блоки сравнения, первый - четвертый блоки 70-73 элементов И, пер- 25 вый 74 и второй 75 блоки инверторов, первый 76 и второй 77 блоки элементов ИЛИ, .третий 78 и четвертый 79 бло- ки сравнения, третий блок 80 элементов ИЛИ.
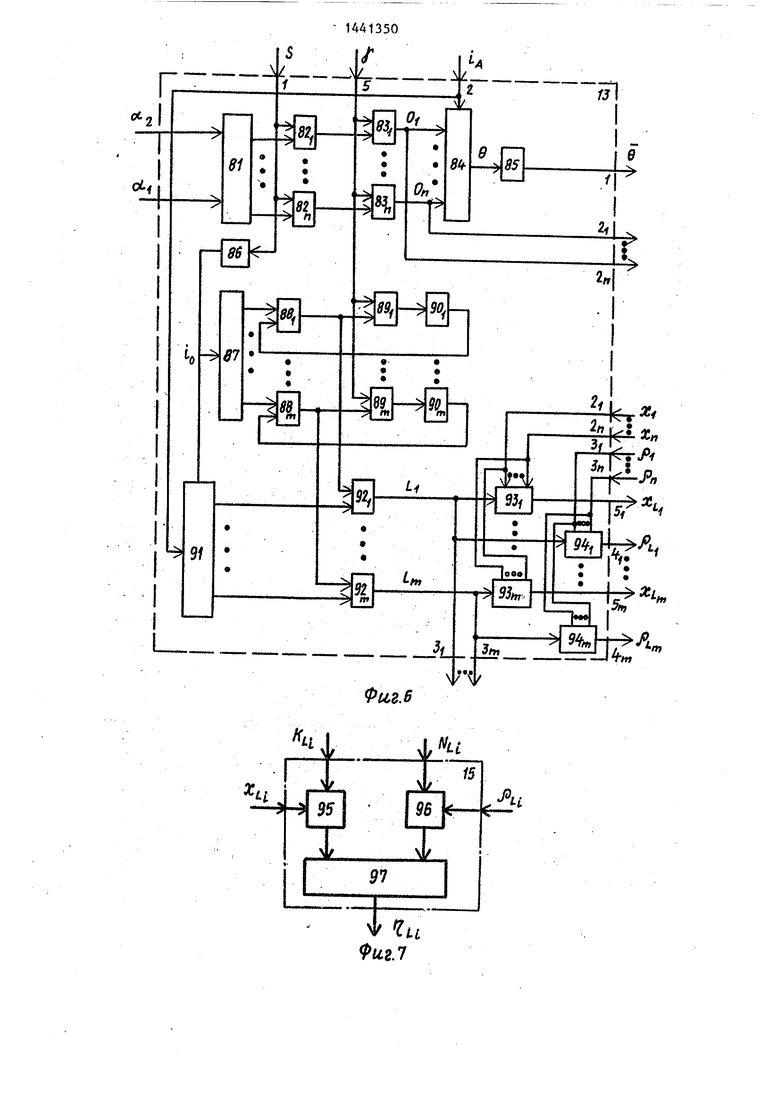
Блок 13 распределения сигналов (фиг. 6) содержит п-разрядный регистр сдвига 81, первую группу 82 из п элементов И, первую группу 83 из п триггеров, мультиплексор 84, элемент 85 НЕ, двоичный счетчик 86, дешифратор
30
сумматоров, одиннадцатый 43 и двенад- 35 87, вторую группу 88 из га элементов И, цатый 44 блоки умножителей, пятый ; вторую группу 8,9 из m триггеров, груп- блок сумматоров 45, демультиплексор 46. пу 90 из m элементов НЕ, демультиплексор 91, группу 92 из m адресных регистров, первую группу 93 и вторую
На фиг Ьначения:
иК
2 приняты следующие обо40
м
M-
- выходные сигналы первого и второго блоков сумматоров;
1 - выход счетчика;
f - -сигнал рассогласования;
6 - выходной сигнал четвертого блока умножителей;
у - выходной сигнал первого блока сравнения;
а - сигнал адаптивного jm- равления;
E.f - значения параметров эталонной модели обслуживаемого модуля;
45
50
55
группу 94 из m мультиплексоров,
На фиг. 6 обозначены д , ig - выходные сигналы мультиплексора и двоичного счетчика соответственно.
Блок 15 формирования сигнала управления содержит (фиг, 7) первый 95 и второй 96 блоки умножителей и блок 97 сумматоров.
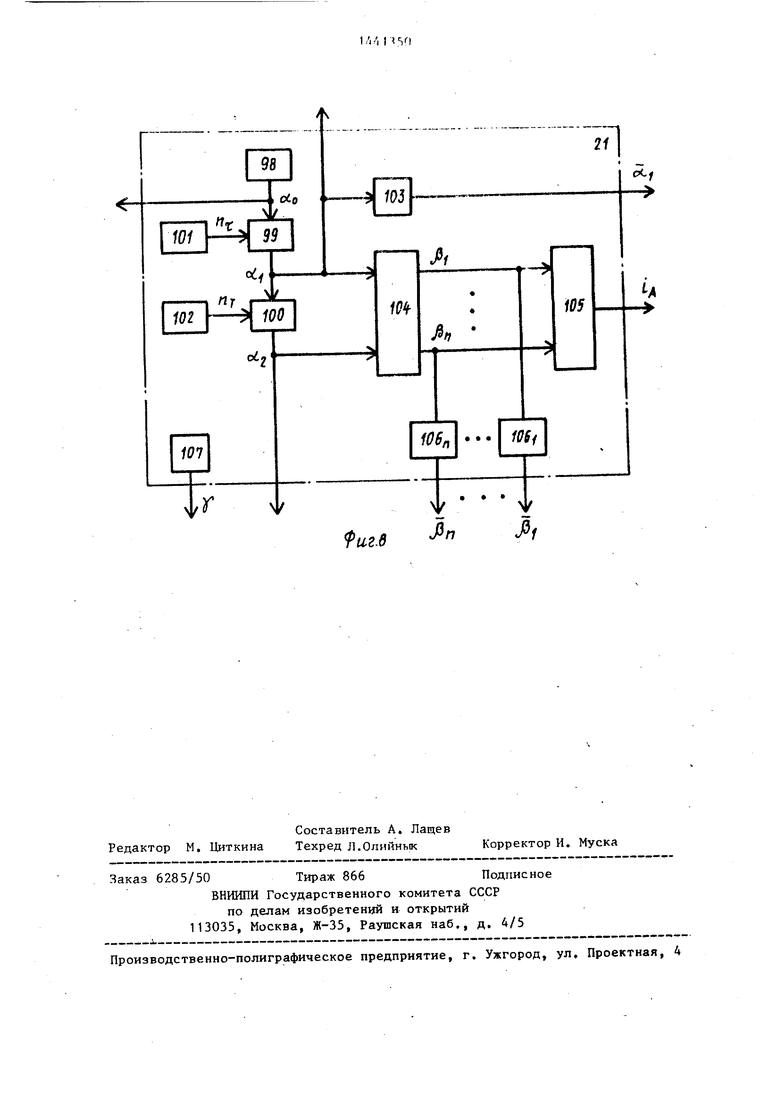
Блок 21 управления содержит (фиг.8) генератор 98 импульсов,первый 99 и второй 100 делители частоты,первый 101 и (Второй 102 регистры, элемент НЕ 103, п-разрядный регистр 104 сдвига, шифратор 105, группу 106 из п элементов НЕ, источник 107 единичного на- П1ряжения.
входные сигналы блока настройки параметров системы;
N,.- значения настраиваемых параметров обслуживаемого модуля в предыдущий момент времени.
5
0
На фиг. 3 обозначены В , ..., Вд - п выходов блока 8.
Блок 9 памяти содержит (фиг. 4) групповой демультиплексор 63, группу 64 из 2п элементов И, группу 65 из п блоков регистров, группу 66 из m + 1-групповых мультиплексоров, группу 67 из п элементов ИЛИ,
БЛок 12 принятия решения об отказе содержит (фиг. 5) первый 68 и второй 69 блоки сравнения, первый - четвертый блоки 70-73 элементов И, пер- 5 вый 74 и второй 75 блоки инверторов, первый 76 и второй 77 блоки элементов ИЛИ, .третий 78 и четвертый 79 бло- ки сравнения, третий блок 80 элементов ИЛИ.
Блок 13 распределения сигналов (фиг. 6) содержит п-разрядный регистр сдвига 81, первую группу 82 из п элементов И, первую группу 83 из п триггеров, мультиплексор 84, элемент 85 НЕ, двоичный счетчик 86, дешифратор
0
5 87, вторую группу 88 из га элементов И, ; вторую группу 8,9 из m триггеров, груп- пу 90 из m элементов НЕ, демультиплексор 91, группу 92 из m адресных регистров, первую группу 93 и вторую
35 87, вторую группу 88 из га элементов И ; вторую группу 8,9 из m триггеров, груп . пу 90 из m элементов НЕ, демультиплексор 91, группу 92 из m адресных регистров, первую группу 93 и вторую
40
45
50
55
группу 94 из m мультиплексоров,
На фиг. 6 обозначены д , ig - выходные сигналы мультиплексора и двоичного счетчика соответственно.
Блок 15 формирования сигнала управления содержит (фиг, 7) первый 95 и второй 96 блоки умножителей и блок 97 сумматоров.
Блок 21 управления содержит (фиг.8) генератор 98 импульсов,первый 99 и второй 100 делители частоты,первый 101 и (Второй 102 регистры, элемент НЕ 103, п-разрядный регистр 104 сдвига, шифратор 105, группу 106 из п элементов НЕ, источник 107 единичного на- П1ряжения.
На фиг о 8 приняты обозначения: /1, , .0., - выходные сигналы регистра сдвига;
n :
514413506
постоянные значения, не отказал, то значения К,N по окончании
С 1
записанные в регистрах 101 и 102 соответственноо Система работает следующим обраего настройки обнуляются о - Для этого на блок 9 памяти от блока 13 распределения сигналов подаются сигналы 0, 0,0, On Кроме того, на блок памяти от блока 21 уггравлення поступают сигналы.. 1л и (7т .
зом
Объект 1 содержит n модулей одинаковой структуры математической модели, Измеренные значения: выходных х,,,., х„, входных g , ,,,j g,, сигналов модулей объекта управления, описываемых математической моделью вида
х + B.g.5 i 1, ГЦ
где Х-, g. - векторы размерности Пд
. и mо соответственно А., В. - матрицы размеров, (),
и ( Ио) S
а также выходы объекта , „, о, р подаются на соответствуюгцие первьй{ 4. второй 5 и третий 6 мультиплексоры, на адресные входы которых от блока 21 управления подается адре;С х обслуего настройки обнуляются о - Для этого на блок 9 памяти от блока 13 распределения сигналов подаются сигналы 0, 0,0, On Кроме того, на блок памяти от блока 21 уггравлення поступают сигналы.. 1л и (7т .
Сигналы К, N с блока 7 поступают
40 иа первые входы первого 10 и второго 11 элементов И, на вторые входы которых от блока 13 распределения сигналов поступает сигнал б; , -если в M-M модуле имеет место отказ,
15 0 1 в противном случае,. .Таким -- образом, элементы И 10, 11 пропускают сигн;алы К и N на блок 12 принятия -решений об отказе лишь в том случае, если в данном модуле еще не бьш
20 установлен отказ« Это не допускает повторного принятия решения об отказе модуля, если ранее уясе было установлено,, что он отказ ал о
Блок 12 принятия решений об откаживаемого модуля (i/ е 1,п). Мульти- 25 не принимает решерше об отказе i ij-ro
. .плексоры 4-6 выбирают сигналы X ; д, 6iAs f 1/1 соответствующие-данйому модулю9 и.подают их на блок 7 настрой ки параметров системЫд организуя тем
модуля на основе сравнения значений настраиваемых параметров К и N с максимально допустимыми к, N° д.ля данного модуляJ которые поступают от
самым периодический режим обслуживй-. зо блока 8 задания постоянных значений.
ниЯо Блок 7, используя сигналы х-д, 6, Л9 Р,м 5 а также сигналы Л, .Вщ 32 Р, loj 1 ;) dt от блока 8 задания по
Благодаря введению первого и второго элементов И сигнал S на выходе блока 12 равен числу отказавших модулей
стоян-ных значений, с(д , г/, , э-д от бло- в объекте зтфавления, ка 21 управления и значения настра- g- . Сигнгш S поступает на блок 13 рас- иваемых параметров для данного пределетгия сигналов, на который по- модуля в предыдущий момент времени даются также сигналы х., , .,,, х,, t - t( t - период дискретизации р, ,, „,.« р j а также 1д , о .,, с/, . . времени) К,и N.,, хранимых в блоке с блока 21 управления. Блок 13 рас40 пределекия сигналов AopNmpyer описан- ньй ранее сигнал б адреса отказавших блоков L.5S «о в 5 и сигналы 0.,
9 памяти, вычисляет значения настраиваемых параметров К и N в текущий момент t, а также формирует множество сигналов (и.; 5 причем
U
О
при
л
при i 1д .
Блок 9 памяти запоминает значения К и N для обслуживаемого модуля, а
Of|S 0; Ij если модуль отказал, О i 0 в противном . 45 Сигналы OY, ,,, 0 подаются также на блок 14 индикации, который отображает информацию о наличии отказов в nepBOKj BTOpoMj «о., .модулях объекта. Блок 13 распределяет f,, SO XL, ..Pi,,, L, сигнальным также значения настраиваемых парамет- входа м ш соответствуюш гх блоков 13 . ров для всех отказа131 юдулей с ад- формирования сигнала управления, ко- ресами L.,, „.,, б l/n, поступающн- торые формируют сигналы ij, .«., i 9 МИ от блока 13 распределения .сигналов пoдaвae зыe на информационные входы и подает значения К, N, ..„, gg демультиплексоров 16. На адресные L, Noj на параметрические входы входы этих демультиплексоров посту- группы из m блоков 15 формирования сигна™ пают адаеса L , отказавших ла управления. Если в результате настрой- модулей Каждый i-й демультиплексор ки установлено, что данный гд-й модуль 16 имеет n выходов, причем п-1 выего настройки обнуляются о - Для этого на блок 9 памяти от блока 13 распределения сигналов подаются сигналы 0, 0,0, On Кроме того, на блок памяти от блока 21 уггравлення поступают сигналы.. 1л и (7т .
Сигналы К, N с блока 7 поступают
иа первые входы первого 10 и второго 11 элементов И, на вторые входы которых от блока 13 распределения сигналов поступает сигнал б; , если в M-M модуле имеет место отказ,
0 1 в противном случае,. .Таким -- образом, элементы И 10, 11 пропускают сигн;алы К и N на блок 12 принятия решений об отказе лишь в том случае, если в данном модуле еще не бьш
установлен отказ« Это не допускает повторного принятия решения об отказе модуля, если ранее уясе было установлено,, что он отказ ал о
Блок 12 принятия решений об откане принимает решерше об отказе i ij-ro
модуля на основе сравнения значений настраиваемых параметров К и N с максимально допустимыми к, N° д.ля данного модуляJ которые поступают от
Благодаря введению первого и второго элементов И сигнал S на выходе блока 12 равен числу отказавших модулей
ходных сигналов его равны нулю и лишь сигнал на L -м выходе равен . Первые выходы всех m демультиплексо- ров 16 поступают на соответствующие m входов первого элемента ИЛИ 17, вторые выходы - на соответствующие га входов второго элемента Ш1Р1 17 и т.д. Таким образом, если Lj-й модуль отказал, то на i-M входе Lj-го элемента ИЛИ из первой группы элемен тов ИЛИ 17 будег сигнал h, . О, а на -
ч. L( I f-j --.
остальных входах - нулевые (i 1 .го). На выходе L; -ro элемента ИЛИ 17 будет
Блок 21 управления формирует, кро- Q ме описанных ранее сигналов /5,, ,.., fifi и адреса обслуживаемого модуля i/ f синхронизированные сигналы а, fl,,cf,, «2 последовательность единичных импульсов с периодом 2Тд
сигнал П;,;, который поступает на пер- g и длительностью единицы То(2Тс.- шаг
вый вход L .-го элемента И 18. Тогда,
если L,, L,j,
9
L ., (К m) - адреса
отказавших модулей, то на выходах L, -ro, L j-ro, ..о, TJ элементов
дискретизации по времени); о( - последовательность единичных импульсов с периодом I ( 1 - время обслуживания каждого модуля) и длительностью
25
импульсов, полученная путем прохождения с/, через элемент НЕ; ol - последовательность единичных импульсов с периодом Т nt и длительностью Т, а также постоянньй сигнал j- единичной величины
Блок 8 задания постоянных значений вьщает сигналы А,, Bл, х, 1о,
К, N
в:
.ИЛИ 17 будут соответственно сигналы 2о импульса о/,- последовательность Ч,, Uj. ,j а на выходах осталь ных элементов ИЛИ 17 - нулевые.
Выходы группы из п элементов ИЖ 17 подключены к первым входам группы из п элементов И 18, на вторые входы которых подаются сигналы ,, ..., р соответственно с блока 21 управления, О, если обслз живается i-й мо- дуль (тсе. 1д i), и р, 1 в противном случае В р.езультате выходной сигнал из группы элементов И , 18
.равен нулю, а выходные сигналы остальных элементов И 18 - нулю Ш1И ц. , 3 1д (в зависимости от- того, отказал ли данный j-й модуль или нет). Выходы п элементов И 18 подключе;ны соответственно к вторым входам п элементов ИЛИ 19, на первые входы которых поступают сигналы и.,, ..,, и „
т, t
БОП
30
, 11 , о,, 00., jj(j , соответст- взпорще обслуживаемому i д-му модулю.
и сигналы Р, li, всех модулей, А,,
ut, В..
одинаковые для 3t , 1о. Р 1-Ь
35
/it поступают на блок 7 настройки, К, № - на 6J10K 12 принятия решения об отказе, В о; , i 1,п - на блоки умножителей 20,
Таким образом, адаптивное управление позволяет обеспечить неизменность динамических характеристик системы
с блока 7 настройки параметров систе- Q при отказах элементов объекта управлемЫо Как было отмечено ранее, первый входной сигнал отличен от нуля лишь для элемента ИЛИ 19, для остальных же элементов ИЛИ 19 сигналы на первом входе равны нулю .Учитывая все. изложенное, выходной сигн ал элемента ИЛИ 19 w,- равен и,- , для элементов ИШ-1 19, которые соответствуют К.отказавшим модулям, , Lg му 0.0, L -му (L ,, L, о.,,
45
ifl) wi.. V.
1,К дпя осталь50
г п«- 1 Т
НЫХ элементов ИЛИ 19 он равен нулюо Сигналы w, . о., W 1 поступают на соответствующие входы группы из п блоков умножителей 20, осуществляющих умножение сигналов w-, i 1,п на
матрицы BOJ 0; ХрЕНЯЩИеся в блоке 8 постоянных значений ( - значенив матрицы Во для i-ro
55
ния, описьшаемых изменениями их параметров, а учет модульной структуры объекта дает возможность локализовать отказы с точностью до элемента объекта, Периодический режим настройки и диагностирования позволяет с помощью описанной системы диагностировать и обеспечить отк;азоустойчивость достаточно большого количества п модулей объекта. Допустимая кратность отказов (т.е. количество отказавших модулей) га (га п) задается, исходя из заданной максимально допустимой вероятности отказа системы. Применение данной системы целесообразно дпя объектов, имеющих большое количество модулей одинаковой структуры, когда возможности аппаратурного резервирования модулей ограничены.
13508,
модуля при отсутствии отказов). Выходы блоков 20 поступают на соответствующие п входов объекта управления, формируя сигналы р , оо., Я для
О
каждого модуля:
Р, р.- R тл, 1 1п I 5 i о, l
Блок 21 управления формирует, кро- Q ме описанных ранее сигналов /5,, ,.., fifi и адреса обслуживаемого модуля i/ f синхронизированные сигналы а, fl,,cf,, «2 последовательность единичных импульсов с периодом 2Тд
g и длительностью единицы То(2Тс.- шаг
и длительностью единицы То(2Тс.- шаг
дискретизации по времени); о( - последовательность единичных импульсов с периодом I ( 1 - время обслуживания каждого модуля) и длительностью
25
импульсов, полученная путем прохождения с/, через элемент НЕ; ol - послдовательность единичных импульсов с периодом Т nt и длительностью Т, а также постоянньй сигнал j- единичной величины
Блок 8 задания постоянных значений вьщает сигналы А,, Bл, х, 1о,
К, N
в:
2о импульса о/,- последовательность
т, t
БОП
30
, 11 , о,, 00., jj(j , соответст- взпорще обслуживаемому i д-му модулю.
и сигналы Р, li, всех модулей, А,,
ut, В..
одинаковые для 3t , 1о. Р 1-Ь
5
/it поступают на блок 7 настройки, К, № - на 6J10K 12 принятия решения об отказе, В о; , i 1,п - на блоки умножителей 20,
Таким образом, адаптивное управление позволяет обеспечить неизменность динамических характеристик системы
5
0
5
ния, описьшаемых изменениями их параметров, а учет модульной структуры объекта дает возможность локализовать отказы с точностью до элемента объекта, Периодический режим настройки и диагностирования позволяет с помощью описанной системы диагностировать и обеспечить отк;азоустойчивость достаточно большого количества п модулей объекта. Допустимая кратность отказов (т.е. количество отказавших модулей) га (га п) задается, исходя из заданной максимально допустимой вероятности отказа системы. Применение данной системы целесообразно дпя объектов, имеющих большое количество модулей одинаковой структуры, когда возможности аппаратурного резервирования модулей ограничены.
Блок 7 настройки параметров системы работает следую1Ш1м образом.
На вторые входы первого и второго блоков 22 и 23 умиожите,пей поступают
м
В
В гходной сигнал блока
на первые входы - д, и Ад,- значения па- модуля при отсутствии
Л,,Хл. + 15„в;
гае
л векторы размерности
II
и т,
Л ,. и В
матрицы размеров (прХПд) и (ПоХт).
На выходе третьего блока 25 умножителей будем сигнал x,ut., ко- Topbrii подается через второр блок сум- Мгчторов 26 па перв.ый вход первого блока элементов И 27, на второй вход которого поступает последовательность единтг ных импульсов .с периодом 1 и длительностью и тульса - Т , Т(,, 2Т р - такт работы системы (2Т(5 - , Сигнал на выходе 27 равен нулю только в течение первого такта настройки модуля, а затем имеет значение выходного сш на- ла х блока 26„ Выходной сигнал блока 27 записывается в блок из По регистров 28, с выхода которого на блоки 23 и 26 поступает записанное ранее значение выходного сигнала первого блока элементов И 27 на предьщу- щем такте о Таким образом, сигнал на выходе блока 26 равен
X
,(t) х„ it + x(t - -3 t).
Toe совокзптность блоков 22-28 реализует движение эталонной модели модуля-к дд - движение 1д-го модуля при отсутствии отказов с Первый блок элементов И 27 к четырнадцатьй вход блока настройки параметров си- стемы о1 введены для обнуления начал ных значений координат х „ в начале
АЛ
обслуживания каждого модуля.
Сигналы X
и X-сравниваются
в
блоке 29, на выходе которого имеем сигнал рассогласования х - х , , поступающий на первьй вход второго блока элементов И 30 о
Однако в начале обслуживания модуля сигнал t может быть не равен нулю даже при отсутствии отказов в модуле, что обусловлено переходным процессом, возникающим в движении х из нулевых начальных условий о Чтобы
избежать этого нежелательного явле- Н1И, которое повлечет за собой ложную настройку, в блок настройки параметров системы введены блоки 31-33. На вход счетчика 31 поступает последовательность единичных импульсов р с периодом 2Тд; на вход первого блока 32 сравнения поступает постоянный i ..
сигнал 1,
2Т/
где tp- время переходного процесса х, определяемое по значениям А, и В, для данного i-ro модуля о Блок 32 сравнивает подсчи- танн/эе счетчиком количество импульсов 1 с Igо Выход у блока сравнения 32, соответствующий условию 1 1, подключен к второму входу второго блока элементов И 30: у 1 при
1 ID у О при 1 1с Поэтому
сигнал на выходе блока 30 в течение времени L.OT начала обслуживания
с- г
модуля равен нулю, а затем ь j , Предусмотрено обнуление показания счетчика по окончании обслзгживания модуля через время С, для чего сигнал 1 подается на второй блок сравнения 33, на другой вход которого посту
пает постоянное значение
Ч
2Т„ счет
При выполнении условия 1 чик 31 обнуляется (1 0)„
Сигнал поступает на первьй вход четвертого блока 34 умножителей, фор- мируюпщй сигнал 6 (Р - постоянная матрица )„ Блоки 35, 37, 39, 41 и 36, 38, 40, 42 формируют значения настраиваемых параметров модуля
К + К.,
N Х )t + N, , Х О,
Тов. реализуют ляпуновские алгоритмы настройки, которые д.пя непрерывного случая имеют вид
К гй х , N жбр о Блоки 43-45 формируют сигнал адаптивного управления и Кх + Np, который распределяется демультиплексором 46 по одному из п выходов,
Блок 8 задания постоянных значений работает следуюгдим образом,
Блоки 47, 48, 51, 53 содержат каждый по п групп регистров, причем в каждой группе блоков 47 и 51 п регистров, а в блоках 48, 52, 53 - „ регистров В 47, 48, 51, 52,
53 для каждого из п модулей записаны значения соответственно элементов матриц А„, В, К% N% В Блоки 49, 50 содержат регистры, в которых для каж- дого модуля записаны соответственно коэффициенты усиления в алгоритмах настройки у. и количество 1 единичньгх
1 импульсов частоты STJT- соответствуЬ
ющее длительности переходного процесса модуля Мультиплексоры 54-59 выбирают значения А, Вд,, ж, 1
о
К
N
соответствующие обслуживаемому
модулюо Восьмой блок 60 регист- 15 76 и 69, 72, 73, 75, 77 ров, содержащий п| регистров, девятый 61 и десятый 62 регистры хранят значения соответственно матрицы Р, величин Jt, одинаковых для всех мо- дулейо20
Блок 9 памяти работает следующим образом
На I информационные входы группового демультиплексора 63 поступают значения настраиваемых параметров К и N. 25 Демультиплексор 63 распределяет текущие значения К и N по п парам выходов в соответствии с адресом i обслуживаемого модуля, К, N., i 1,п записываются в соответствующие 30 п групп регистров 65 (по ПоСпо+Шо) регистров в каждой группе).Для того, чтобы обнулить записанные значения
солютные значения I К I и ственно, а блоки 78 и 79 ют их сравнение с соотве значениями К° и №, Блок тов ИЛИ объединяет оба н
|кЬк% INI №о
Блок 13 распределения работает следующим образ
На информационньй вхо сдвига 81 поступает посл
ность с/2 единичных импул одом Т, А на тактовый
ные импульсы с периодом
поступлении каждого импу товый вход в регистр зап информация с информацион регистра: в начале обслу
поступлении каждого импул товый вход в регистр запи информация с информационн регистра: в начале обслуж
вого модуля на первом так
К., N., i 1,п при отсутствии отказа i-ro модуля по окончании обслужи- 35 вания модуля, введены 2п элементов И 64 и п элементов ИЛИ 67 На входы i-ro из п элементов ИЛИ 67 поступают
сигналы О и (/. Если О .- 1 (i-й мо V ,меняться до тех пор, пока
дуль отказал;, то на выходе 1-го эле- 40
-т 1.тт .4f лгитт гп
мента ИЛИ 67 всегда будет единица, поэтому значения К, N записьгоают- ся в i-й из групп регистров 65 Если (i-й модуль не отказал), то по окончании обслуживания i-ro моду- 45; ля (когда , 0) содержимое i-ro труппы регистров обнуляется. Значеи с/ 1., поэтому в первый регистра запишется единиц тальных останутся нули; д О, и содержимое регистр
вый вход не поступит следу пульс ( начнется обслу второго модуля) с/, 1, o/j ница переместится из перв да регистра во второй, а первого разряда станет нуле Таким образом, в течение в служивания i-ro модуля сод i-ro разряда регистра равн а остальных - нулю. Если б тия решений об отказе уста каз i-ro модуля, то сигнал пающий на вторые входы пер ментов И 82, становится ра нице На первые входы п эл И 82 поступают сигналы с с вующих п разрядов регистра поэтому на выходе лишь i-r та И появляется единичный
ния Kj, N;, i 1,п с выходов групп регистров 65 поступают на i-e инфор- йационные входы всех т+1 групповых мультиплексоров 66 На адресные входы m мультиплексоров поступают L, .,,, Ъ|„ - адреса первого, , га-го отказавших модулей i-й мультиплексор выбирает значения К,, NL. и подключает их к параметрическим входам i-ro ,бло- ка формирования (т+1)-й мультиплексор выбирает значения настраиваемых параметров i-ro модуля и подает их
76 и 69, 72, 73, 75, 77
на блок, настройки параметров системы в качестве К, , N-i.
Блок 12 принятия решений об отказе устанавливает наличие отказа обслуживаемого модуля на основе допускового контроля значений К и N: если (К I К° или INI №, то выходной сигнал блока S 1, в противном случае , Блок состоит из двух одинаковых каналов, „содержащих блоки 68, 70, 71, 74, 76, 78 и 69, 72, 73, 75, 77 и 79, и объединяющего блока элементов ИЛИ 80. Совокупности блоков 68, 70, 71, 74,
вычисляют абсолютные значения I К I и I N I соответственно, а блоки 78 и 79 осуществляют их сравнение с соответствующими значениями К° и №, Блок 80 элементов ИЛИ объединяет оба неравенства
|кЬк% INI №о
Блок 13 распределения сигналов работает следующим образом
На информационньй вход регистра сдвига 81 поступает последовательность с/2 единичных импульсов периодом Т, А на тактовый - с/, (единичные импульсы с периодом
Т
поступлении каждого импульса на тактовый вход в регистр записывается информация с информационного входа регистра: в начале обслуживания первого модуля на первом такте о, 1
меняться до тех пор, пока
.тт .4f лгитт гп
и с/ 1., поэтому в первый разряд регистра запишется единица, а в остальных останутся нули; далее с( df О, и содержимое регистра не будет
на тактовый вход не поступит следующий импульс ( начнется обслуживание второго модуля) с/, 1, o/j О - единица переместится из первого разряда регистра во второй, а содержимое первого разряда станет нулевым, и т,д. Таким образом, в течение времени обслуживания i-ro модуля содержимое i-ro разряда регистра равно единице, а остальных - нулю. Если блок принятия решений об отказе установил отказ i-ro модуля, то сигнал S, поступающий на вторые входы первых элементов И 82, становится равным единице На первые входы п элементов И 82 поступают сигналы с соответствующих п разрядов регистра сдвига 81 поэтому на выходе лишь i-ro элемента И появляется единичный сигнал, а
13
у остальных элементов - нулевые Этот сигнал является тактовым импульсом для i-го триггера для первой группы из п первых триггеров 83,. а на информационные входы всех триггеров 83 поступает единичный сигнал с блока управления. Поэтому только в i-й триггер запишется единица: П| 1, О у 0 при j 1. Поскольку решение об отказе i-ro модуля повторно не принимается, то значение 0; 1 сохраняется в течение всего времени функционирования системы. Таким образом, содержимое триггеров 8.i несет информацию о номерах отказавших модулей. Первьй мультиплексор 84 вьща ет сигнал 6 о состоянии обслуживаемого модуля, который проходит через первый элемент НЕ 85, преобразуясь в сигнал 0 о
Сигнал S подается также на двоичный счетчик 86, который подсчитывает количество отказавших модулей объекта Выход счетчика 86 io поступает на адресный вход демультиплексора 91 на информационный вход которого поступает адрес ifi обслуживаемого модуля. В соответствии с номером отка
за i о 1,п1 демультиплексор 91 пропускает сигнал д по Хд-му выходу на информационный вход ig-ro адресного регистра 92 (на остальных выходах будут нулевые сигналы). В io-й адресньй регистр 92 информация запи- ос„„
ОДОМ i.l
сьюается лишь при поступлении единичного сигнала на его тактовьй вход. Тактовый импульс появляется на входе каждого из адресных регистров 92 не более одного раза, что обеспечивает 40 постоянное хранение регистрами своего содержимого
Тактовые импульсы формируются блоками 87-90 Дешифратор 87 преобh 4
Блок 21 управления работает следующим образом
Генератор 98 вьщает последовательность единичных импульсов в/о с перии длительностью импульса TO. Первьй делитель 99 прореживает эту последовательность, пропуская каждьй
Пд-й импульс, п те- и хранится
в первом регистре 101, тем самым получается последовательность с/, , которая, проходя через первьй элемент
разует двоичньй сигнал IQ в код 1 из т, . Ha.ip-M выходе его появляется единица, а на остальных выходах нули. Выходы дешифратора подключены к первым входам второй группы из га элементов И 88, выходы которых подключены.к соответствующим тактовым входам второй группы из m триггеров 89, а на информационные входы триггеров поступает единичньй сигнал v, В начале работы содержимое всех триггеров равно нулю Выходные сигналы триггеров проходят через соответствующие га элементов НЕ 90, становятся равными единице
НЕ 102, дает с;, d поступает также .45 на второй делитель частоты 100, ко- торьй выделяет из нее каждьй n-r-tf
Т
импульс (п - п), образуя последовательность й ,, о, и о( о Работа п-разрядного регистра сдвига 104 аналогична работе регистра сдвига в блоке распределения сигналов: если обслуживается i-й модуль, то в i-м разряде регистра будет записана едиgg ница ( | 5; 1)jа в остальных - нули
C/Jj О, j 1,п, j 7 i) „ Сигналы
50
Pi,
/ь „ с выходов всех п разрядов регистра поступают на шифратор 105, которьй преобразует их в двоич
0
14
и поступают вторые входы элементов И 88„ Поэтому при обнаружении первого отказа (io 1) формируется тактовьй импульс для триггера 89,, и в него записывается единица Одно- временно с записью единигЦ) в триггер происходит запись адреса I. первого отказавшего модуля в адресный регистр 92,,, Затем сигнал на выходе элемента НЕ 90, становится нулевым и, поступая на элемент И 88, предотвра- 1цает формирование тактового импульса и повторную запись в триггер 89/ и адресньй регистр 92,„ Аналогично для второго, третьего, ... отказов. Адреса L
1
L. отказавших модулей
поступают на адресные входы соответ- ствуюищх пар мультиплексоров 93 и 20 94, ..о, на информационные входы которых поступают сигналы х, ,.., х, и р, , ..., р„ ,i; i-я пара (i fTm) мультиплексоров выбирает соответст . вующие сигналы х.и р,и подает их 25 на i-й блок формирования сигнала уп- равлерия.
Блок 15 формирования сигнала уп- . равления формирует сигнал по следу- i ющему закону: , . К, .к,..+ NL.P
ос„„
Блок 21 управления работает следующим образом
Генератор 98 вьщает последовательность единичных импульсов в/о с пери„„
ОДОМ i.l
и длительностью импульса TO Первьй делитель 99 прореживает эту последовательность, пропуская каждьй
Пд-й импульс, п те- и хранится
в первом регистре 101, тем самым получается последовательность с/, , которая, проходя через первьй элемент
Pi,
/ь „ с выходов всех п разрядов регистра поступают на шифратор 105, которьй преобразует их в двоичI 15
ный код, формируя адрес i обслуживаемого модуля о /3, ..,, А проходят через п вторых элементов НЕ 106, выходные сигналы /}, , .00, которых поступают на выходы блока управления
Источник 107 единичного напряжения вьщает постоянньй сигнал у, со- OTBeTctB3nomHH единице.
За счет периодической настройки отдельных модулей объекта управления осуществляется диагностирование объекта до параметров модулей. Вследствие этого для тех случаев, когда адаптивное управление не может обеспечить отказоустойчивость объекта, имеется информа191я для подключения резервных модулей, Повьшение же глубины диагностирования позволяет снизить аппаратурные затраты на обеспечение отказоустойчивости объекта путем перехода от резервирования всей системы к резервированию некоторых ее модулей, в которых возможны некомпенсируемые адаптивным управлением отказы. При этом кратность резервирования различ1и х модулей .может быть различной в зависимости от степени влияния отказа данного модуля на работу всей системы в целом. Повышение глубины диагностирования даст возмож ность также минимизировать количество одновременно перестраиваемых.параметров системы
Формула изобретения
1 о Адаптивная диагностическая система, содержащая объект управления, к первой группе из п выходов которог подключена группа из п блоков измерителей выходных сигналов объекта управления, а к второй группе из п выходов подключена группа из п бло
КОВ измерителей входных сигналов объ- 5 значений, а выход блока принятия реекта управления, выходы измерителей выходного сигнала объекта управления группы, измерителей входного сигнала объекта управления группы и третья группа из п выходов объекта управления под1слючены к соответствующим группам информационных входов первого, второго и третьего мультиплексоров, выходы которых соединены соответственно с первым, вторым и третьим информационными входами блока настройки параметров системы, отличающаяся тем, что, с целью повьшения отказоустойчивости
50
55
шений об отказе подключен к первому входу блока распределения сигналов, первая группа входов которого соединена с соответствующими выходами измерителей выходного сигнала объекта управления группы, вторая группа входов блока распределения сигналов связана с третьей группой из п выходов объекта управления, второй вход блока распределения сигналов соединен с первым выходом блока управления, тактовым входом блока задания постоянных значений, первым управляющим входом блока памяти, адресными
1441350
16
системы путем увеличения глубины диагностирования, в нее дополнительно введены блок задания постоянных значений, блок памяти, первьй, второй элементы И и группа из п элементов И, блок принятия решений об отказе, блок распределения сигналов, блок индикации, группа из га блоков
формирования сигнала управления
(т - максимально допустимое количество отказав1иих модулей объекта управления, m п), группа из m демуль- тиштексоров, первая и вторая группы
5 из п элементов ИЛИ, группа из п блоков умножителей и блок управления, причем выходы блока задания постоянных значений с первого по седьмой соединены соответственно с четвертого
0 по десятый информационными входами блока настройки параметров системы, группа из п выходов блока задания постоянных значений связана с первыми входами блоков умножителей группы, вторые входы которых соединены соответственно с выходами элементов ИЛИ второй группы, а выходы блоков умножителей группы подключены к группе из п входов объекта управления, первый и второй выходы блока настройки параметров системы соединены соответственно с первыми входами первого и второго элементов И, а также с первым и вторым информационными входами
д блока памяти, вторые входы первого и второго элементов И подключены к первому выходу блока распред.еления сигналов, а выходы первого и второго элементов И соединены соответственно с первым и вторым входами блока принятия решений об отказе, третий и четвертый входы которого соединены соответственно с восьмым и девятым выходами блока задания постоянных
5
0
0
0
5
шений об отказе подключен к первому входу блока распределения сигналов, первая группа входов которого соединена с соответствующими выходами измерителей выходного сигнала объекта управления группы, вторая группа входов блока распределения сигналов связана с третьей группой из п выходов объекта управления, второй вход блока распределения сигналов соединен с первым выходом блока управления, тактовым входом блока задания постоянных значений, первым управляющим входом блока памяти, адресными
зкодамн первого, второго и третьего мультиплексоров, а также с первым управляющим входом блока настройки параметров системы, третий, четвер- тый и пятый входы блока распределения сигналов соединены соответственно с вторым, третьим и четвертым выходами блока управления, первая группа выходов блока распределения сигналов подключена к группе входов блока индикации и- к первой группе из п входов блока памяти, вторая rpjTina выходов, блока распределения сигналов соединена с второй группой из га входов блока памяти, третья и четвертая группы выходов блока распределения сигналов соединены соответственно с первыми и вторыми сигнальными входами блоков формирования сигнала управления группы, nep вые и вторые параметрические входы которых соединены соответственно с первой и второй группами выходов блока памяти, первый .и второй выходы блока памяти соединены соответствен- но с одиннадцатым и двенадцатым информационными входами блока настройки параметров системы, а второй jrn- равля1ощий вход блока памяти соединен с пятым выходом блока управления и вторым управляющим входом блока настройки параметров системы, третий управлякнций вход которого подключен к шестому выходу блока управления, вторая группа из m выходов блока распределения сигналов соединена с первыми входами демультиплексоров группы, вторые входы которых соединены соответственно с выходами блоков формирования сигнала управления груп {ЕШ, п выходов которых соединены с соответствующими входами элементов ШШ первой группы, выходы элементов ИЛИ первой группы подключены соответственно к первым входам элементов И группы, вторые.входы которых соеди ;,нены с группой из п выходов блока управления, выходы элементов И группы соединены соответственно с первыми входами элементов ИЛИ второй группы, вторые входы которых подключены к грзтпе из п выходов блока настройки параметров системы
2о Система по п, 1, отличающаяся тем, что блок настройки параметров системы содержит с первого по двенадцатый блоки умножителей, с первого по пятьй блоки сумма
5
0.
торов, первый и второй блоки элементов И, блок регистров, блок вычита- телей, счетчики, первьй и второй блоки сравнения, демультиплексор, причем первые входы первого и второго блоков умножителей являются соответственно четвертым и пятым информа- ционными входами блока настройки параметров системы, второй вход первого блока умножителей является вторым информационным входом блока настройки параметров системы, выходы первого и второго блоков умножителей связаны соответственно с первым и вторым входами первого блока сумматоров, выход которого соединен с первым входом третьего блока умножителей, второй вход которого соединен с десятьм информационным входом блока настройки параметров системы и вторыми входами девятого и десятого блоков умножителей, выход третьего блока умножителей подключен к перво- 5: му входу второго блока сумматоров, вькод которого подключен к первому входу блока вычиТателей и первому входу первого блока элементов И, второй Вход которого является вторым 0 управляющим входом блока настройки параметров системы, выход первого блока элементов И через блок регистров подключен к второму входу второго блока сумматоров и второму входу 2 второго блока умножителей, второй вход блока вьгаитателей подключен к первому информационному входу блока настройки параметров системы и вторым входам пятого и. одиннадцатого 0 блоков умножителей, выход блока вы- читателей соединен с первым входом второго блока элементов И, второй вход которого соединен с выходом первого блока сравнения, выход второго блока элементов И подключен к первому входу четвертого блока умножите- . лей, второй вход которого является восьмым информационным входом блока настройки параметров системы, выход четвертого блока умножителей подключен к первым входам пятого и шестого блоков умножителей, выход пятого блока умножителей соединен с первым входом седьмого блока умножителей, второй вход которого является шестым информационным входом блока настройки параметров системы и вторым входом восьмого блока умножителей, первый вход восьмого блока умножителей свя5
0
55
ly
зан с выходом шестого блока умножителей, выходы седьмого и восьмого блоков умножителей подключены соответственно к первым входам девятого и десятого блоков умножителей, выходы которых соединены с первыми входами третьего и четвертого блоков сумматоров, вторые входы которых являются соответственно двенадцатым и один- надцатым информационными входами блока настройки параметров системы, выход третьего блока cy мaтopoв является первым выходом блока настройки параметров системы и соединен с первым входом одиннадцатого блока умножителей, а выход четвертого блока сумматоров является вторым выходом блока настройки параметров системы и соединен с первым входом двенадцатого бло- ка умножителей, второй вход которого является третьим информационным входом блока настройки параметров системы и подключен к второму входу шестого блока умножителей, выходы одиннад- цатого и двенадцатого блоков умножителей связаны соответственно с первым и вторым входами пятого блока сумматоров, выход которого соединен с первым входом демультиплексора, второй вход демультиплексора является первым управляющим входом блока настройки параметров системы, а группа из п выходов демультиплексора является группой из п выходов блока настройки параметров системы, третий управля10 г(ий вход блока настройки параметров системы является первым входом счетчика, выход которого соединен с первыми входами первого и второго блоков сравнения, вторые входы первого и второго блоков сравнения являются соответственно седьмым и девятым инфopмaциoнны и входами блока настройки параметров системы, выход второго блока сравнения соединен с вторым входом счетчика,
ТЗО20
входы п-рапряшюго рег(гстра сднигл являются соответственно тре.тытм и четвертым входаьш блока распределения С1ггнялор, группа из п выходов п-разрядного регистра сдвига соединена с первыьп входаъш первой группы ил п элементов И, вторые входы которых явпяются первым входом блока распределения сигналов и связаны с входом счетчика, выход которого подключен к входу дешифратора и пер- 150МУ входу демультиплексора, второй вход демультиплексора подключен к управляюще г входу мультиплексора и яштяется вторым входом блока распределения сигналов, пятый вход блока распределения сигналов подключен к первым входам первой группы из п и второй из m триггеров, вторые входы которых соед1П1ены с соот- ветствук)Ш1№1 выходами первой группы из п и второй группы из m элементов Н, вькоды первой группы из п триггеров связаны с соответствующими информационными входами fyльти- плексора и являются первой группой выходов блока распределения сигналов, вьгход мультиплексора через элемент НЕ соединен с первым выходом блока распределения сигналов, выходы второй группы из m триггеров связаны соответственно через группу из m элементов НЕ с вторыми входами второй группы из m элементов И, первые входы которых соединены с соответствующими m выходами дешифратора, выходы второй группы из m элементов И подключены соответственно к первым входам группы из m адресных регистров, m выходов демультиплексора подсоединены к вторым входам группы из m адресных регистров, выходы которых подключены к соответствую шм управляющим входам первой и второй групп из та мультиплексоров, а также являются второй группой выходов блока распределения сигналов, первая группа входов блока распределения сигналов подключена к группе из п информационных входов первой группы из m мультиплексоров, вторая группа входов блока распределения сигналов подключена к группе из и информационных входов второй группы из m мультиплексоров, выходы первой и второй групп из m мультиплексоров являются соответственно третьей и четвертой группами выходов блока распределения сигналов.
,
ft.2
Г
1 3
.J
Т
ilf
At
и.г. З
Ф ti
Ut7
иг.в
Л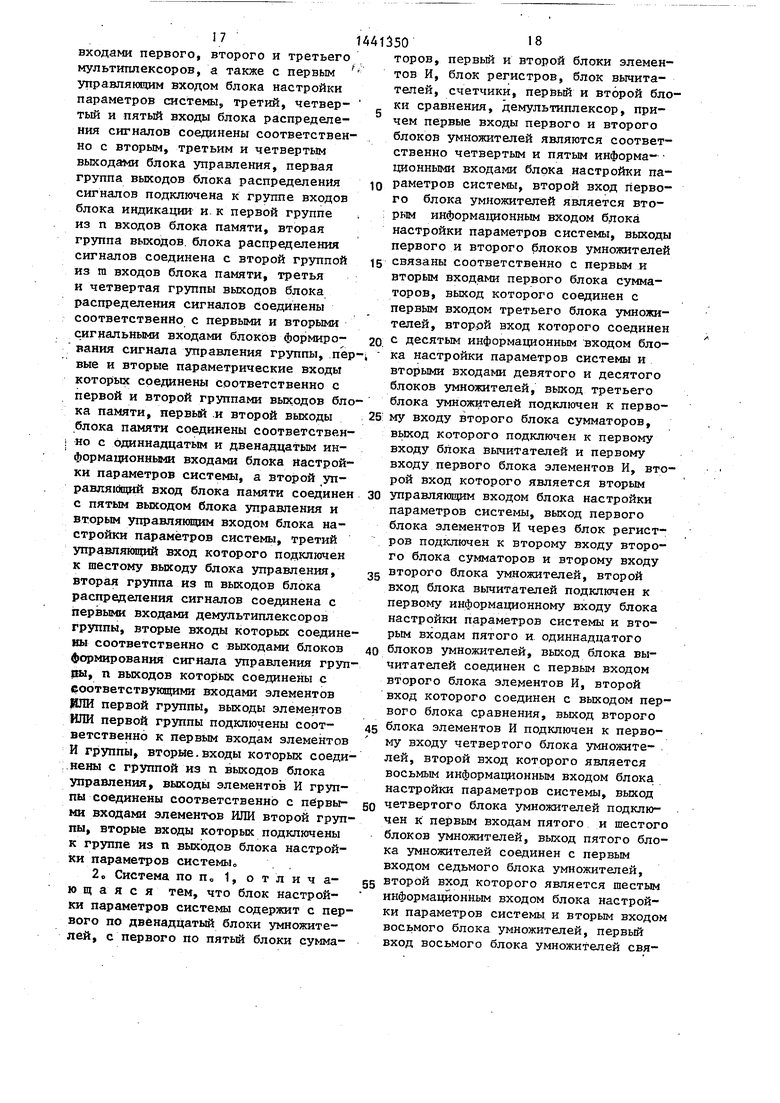
| Адаптивная система управления нестационарным линейным объектом | 1984 |
|
SU1277067A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
