1
15
Изобретение относится к робототехнике и может быть использовано для записи программы управления промьш- ленным роботам.
Целью изобретения является повышение скорости записи программы путем сокращения времени определения - точек прямолинейных участков траектории и упрощения устройства за счет уменьшения объема памяти из-за умень шения количества записываемых точек траектории.
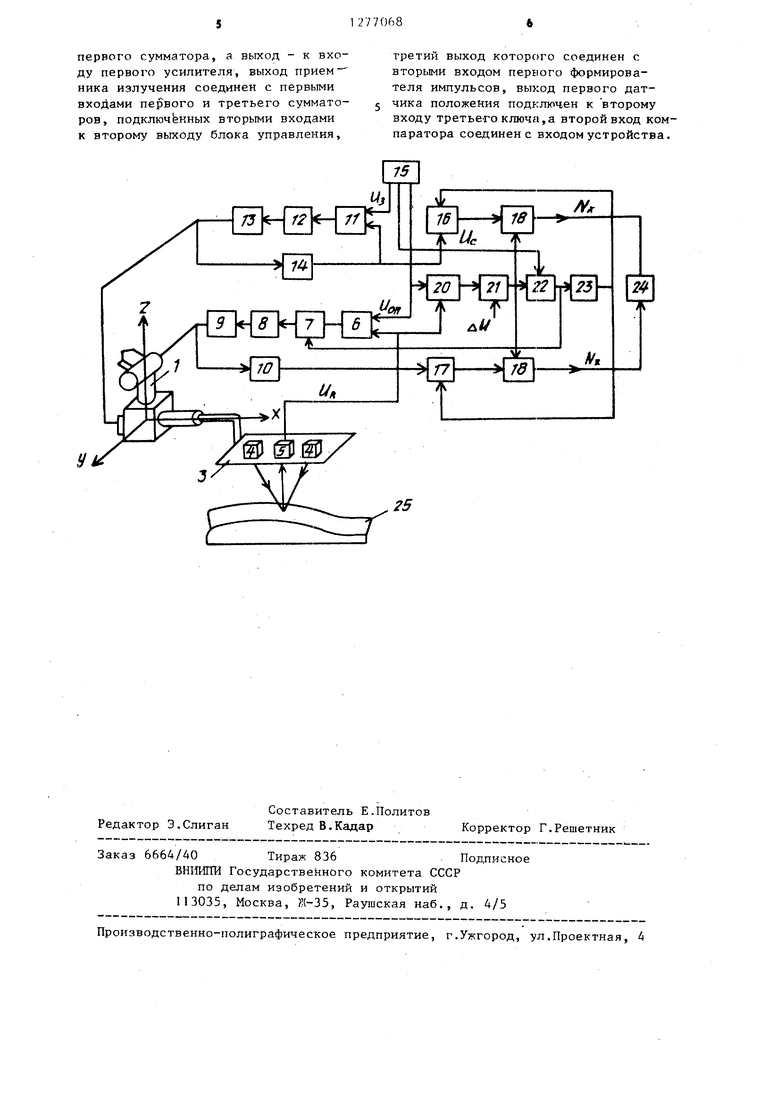
На чертеже представлена функциональная схема устройства.
На чертеже приняты следующие обозначения: координата 1 вертикапьно- го перемещения сигнализатора, координата 2 .горизонтального перемещения манипулятора, каретка 3, источники 4 излучения, приемник 5 излучения, первый сумматор 6, первый ключ 7, пер- вый усилитель 8, первый двигатель 9, первый датчик 10 положения, второй сумматор 11, второй усилитель 12, второй двиг атель 13, второй датчик 14 положения, блок 15 управления, . второй и третий ключи 16 и 17 соответственно, первый и второй аналого- цифровые преобразователи 18 и 19 соответственно, третий сумматор 20, компаратор 21, первый и второй формирователи 22 и 23 импульсов соответственно, блок 24 памяти, рабочая поверхность 25, и, UQ, V - выход- ные сигналы блока 15 управления, Up - ВЫХ.ОДНОЙ сигнал приемника 15 излучения, ди - входной сигнал компаратора 21, Ы и И - входные сигналы блока 24 памяти.
4 Л
-
25
30
35
Устройство работает cлeдyюш iм образом.
В процессе записи точек рабочей траектории оператор с помощью блока 15 управления подключает к входу сумматора 1 1 привода координаты 2 напря- S преобразователей 18 и 19. В результа- жение Ш. В результате этого исполнительный орган перемещается в горизонтальном направлении (вдоль оси х) и останавливается опе атором в первой точке - точке начала заданной траектории, в результате этого движения каретка 3 перемещается по оси X в эту точку. После выполнения этого движения -оператор с помощью блока 15 управления подает на управляющий вход формирователя 22 сигте преобразования напряжения в последних представлены значения кодов Ы и N., характеризующие положение первой точки рабочей траектории. 50 После этих предвар ительных операций .оператор снова подает на вход сумматора 1 напряжение: U и плавно перемещает каретку 3 Е:ДОЛЬ оси х по направлению рабочей траектории, например слева направо. Такое перемещение осуществляется; за счет подачи на вход сумматора 11 медленно и линейно изменяющегося напряжение Ui.
55
нал U-J., а на вход сумматора 6 - постоянное значение напряжение U, .
277068
В результате этих операций на выходе формирователя 22 формируется строб, под действием которого ключ 7 открывается и привод координаты 1 вертикального перемещения дтрабатьгоает
значение напряжения U, , которое с сумматора 6 через открытый ключ 7 и усилитель 8 поступает на двигатель 9. При подаче напряжения и„ привод
4 Л. О т1
координаты 1 вертикального перемещения перемещает каретку 3 по высоте до тех пор, пока значение U . не
сравняется со значением напряжения Uj, снимаемым с выхода приемника 5 излучения. Значение напряжения U подается на второй вход сумматора 6, и привод вертикального перемещения работает в следящем режиме, отрабатывая рассогласование значениями напряжений U. и U . Величина напряжения и Of, выбирается при настройке устройства и соответствует максимальному значению отраженного сигнала, снимаемому с приемника 5, в случае, когда, оба источника 4 излучения сфокусированы и направлены под разными углами в одну точку.
Результаты перемещения координат 1 и 2 измеряются датчиками 10 и 14 положения. После отработки сигнала и каретка 3 занимает определенное значение по высоте относительно рабочей поверхности 25, а лучи источников 4 излучения направлены в новую точку. Отработка значения напряжения осуществляется в период действия на управляющий вход ключа 7 импульса строба с формирователя 22. По окончании строба на выходе формирователя 23 формируется импуЛьс, 1соторый дается на управляющие входы ключей . ; 16 и 17. Эти ключи открываются, и напряжение с датчиков 10 и 14 положения подается на информационные входы
преобразователей 18 и 19. В результа-
те преобразования напряжения в последних представлены значения кодов Ы и N., характеризующие положение первой точки рабочей траектории. После этих предвар ительных операций .оператор снова подает на вход сумматора 1 напряжение: U и плавно перемещает каретку 3 Е:ДОЛЬ оси х по направлению рабочей траектории, например слева направо. Такое перемещение осуществляется; за счет подачи на вход сумматора 11 медленно и линейно изменяющегося напряжение Ui.
В процессе горизонтального перемещения каретки осуществляется автоматическое снятие существенных точек траектории с установкой каретки 3 на фиксированную высоту. Сущес венными точками кривой считаются токи, в которых кривизна кривой превышает заданное значение допуска. Процесс записи этих точек осуществляется следующим образом. В процессе перемещения каретки 3 на вход сумматора 20 подается текущее значение напряжения U , которое изменяется в процессе перемещения из-за изменени кривизны траектории в заданном направлении движения. На второй вход этого сумматора 20 подается опорное значение напряжения и,, с блока управления. В результате сравнения этих напряжений по величине с выхода сумматора 20 на вход компаратора 21 подается разностное значение напряжения U,., -U . На второй вход компаратора 2 приложено напряжение ли, которое задается исходя- из допустимых отклонений траектории, определяемых исходя из требований технологического процесса сварки, окраски и т.и. При сравнении модуля разностного значения напряжения с допустимым значением uU компаратор 21 сработает и с его вькода на управляющие входы пре образователей 18 и 19 подается сигнал, по которому их содержимое (коды и N., характеризующие положение предыдущей точки} переписывается в блок 24 памяти. Одновременно импульсом с компаратора 21 на выходе формирователя 22 формируется строб, который открывает ключ 7 и разностное значение напряжения между Uflf, и Up поступает на двигатель 9. Под действием сигнала рассогласования привод координаты 1 вертикального перемещения перемещает каретку 3 по оси Z (вверх или вниз) до тех пор, пока значение и не станет равным U, , т.е. пока каретка 3 не займет заданное значение по высоте. По окончании импульса строба на выходе формирователя 23 формируется сигнал , которым от- крьшаются ключи 16 и 17, и значения напряжений, с датчиков 10 и 14, характеризующие положение координат 1 и 2 в следующей точке, подаются на входы преобразователей 18 и 19.
to
f5
20
25
5 30
5
0
5
0
5
Последующая запись существенных точек заданной кривой, в которых ее крутизна отличается более чем на величин ± ди, осуществляется аналогичным образом. При этом очевидно, что для участков траектории с малой кривизной или
Ot К
прямолинейных участков число записываемых точек будет минимальньм.
Таким образом, за счет исключения избыточных точек предлагаемое изобретение позволяет уменьшить объем используемой для записи заданной траектории памяти, а автоматическое считьгоание точек траектории сокращает время записи программы.
Формула изобретения
Устройство для программирования промьшленного робота, содержащее блок памяти, первый сумматор и последовательно соединенные первыйусилитель и первьй двигатель, механически связанный с первым датчиком положения, последовательно подключенные блок управления, второй сумматор, второй усилитель и второй двигатель,, механически.связанный с вторым датчиком положения, выход которого соединен с вторым входом вт орого сумматора, отличающееся тем, что, с целью повьппения скорости записи программы и упрощения устройства, оно содержит установленные на каретке два источника излучениями приемник излучения, первый ключ, , второй ключ, первый аналого-цифровой преобразователь и последователь но соединенные третий сумматор, компаратор, первый формирователь импульсов, второй формирователь импульсов, третий ключ и второй аналого-цифровой преобразователь, соединенный с , первым входом блока памяти, второй вход которого подключен к выходу первого аналого-цифрового преобразо- .вателя, соединенного первым входом с выходом компаратора и вторым входом второго аналого-цифрового преобразо- . вателя, а вторым входом - с выходом второго ключа, первый вход которого подключен к выходу второго : датчика положения, а второй вход - к выходу второго формирователя импульсов, соединенного входом с первым входом первого ключа, второй вход которого подключен к выходу
первого сумматора, а выход - к входу первого усилителя, выход прием- ника излучения соединен с первыми вхоДами первого и третьего сумматоров, подключЬнных вторыми входами к второму выходу блока управления.
третий выход которого соединен с вторыми входом первого формирователя импульсов, выход первого датчика положения подключен к второму входу третьего ключа,а второй вход компаратора соединен с входом устройства.
mzjH
и,,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1982 |
|
SU1084726A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Устройство для управления очувственным роботом | 1982 |
|
SU1068887A1 |
| Следящий фазометр (его варианты) | 1981 |
|
SU1029095A1 |
| Устройство для измерения фазового рассогласования | 1980 |
|
SU883788A2 |
| Устройство для измерения экстремумов | 1983 |
|
SU1108465A1 |
| Устройство для определения динамической петли перемагничивания ферромагнитных материалов | 1972 |
|
SU437990A1 |
| Цифровой измеритель искажений синусоидального напряжения | 1981 |
|
SU953588A1 |
| Ультразвуковой дефектоскоп для контроля сварных швов | 1986 |
|
SU1388786A1 |
| Следящий фазометр | 1980 |
|
SU894595A1 |
Изобретение относится к области робототехники и может быть использовано для записи программы управления промышленным роботом. В изобретении за счет введения источников излучения, приемника излучения, двух формирователей импульса, трех ключей, двух аналого-цифровых преобразователей-, компаратора повьшаются скорости записи программы и уменьшается объем памяти. 1 ил. сл с го -ч1 О) 00
Редактор Э.Слиган
Составитель Е.Политов Техред В.Кадар
Заказ 6664/АО Тираж 836Подписное
ВННИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор Г.Решетник
| Устройство для позиционного управления роботом-манипулятором | 1976 |
|
SU636076A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для записи программыупРАВлЕНия пРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU807216A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
