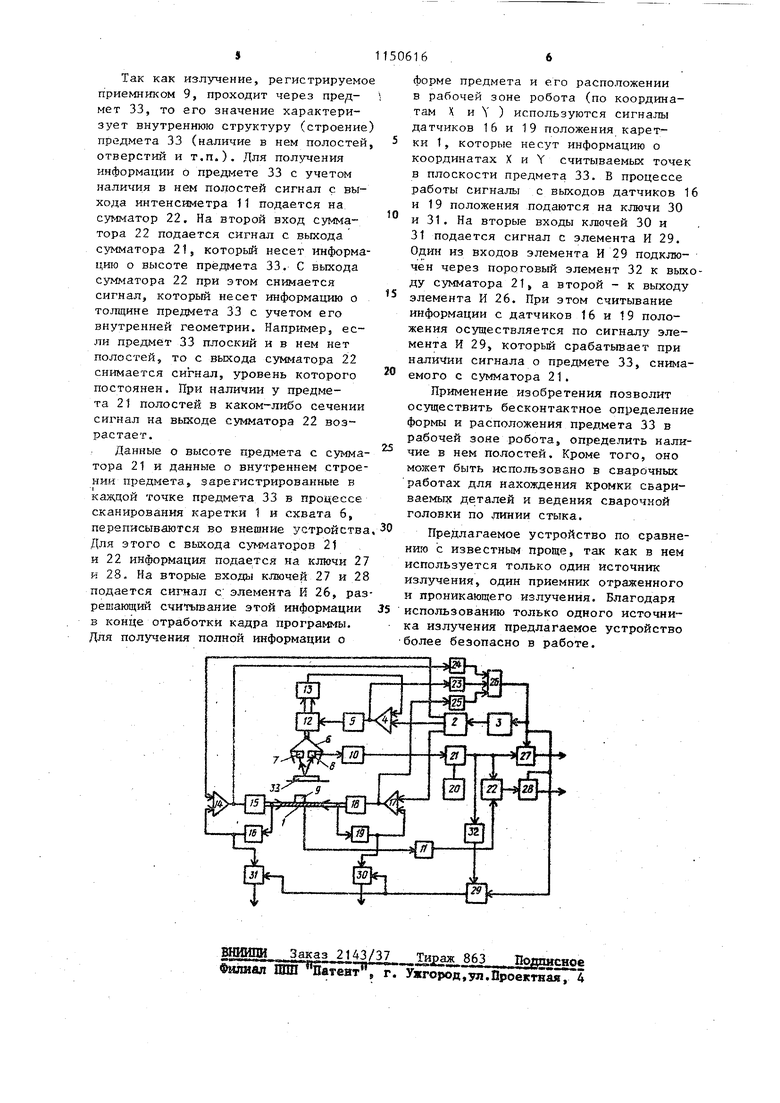
Изобретение относится к робототехнике и может быть использовано при создании адаптивных, роботов. Известно устройство для управления адаптивным роботом, содержащее информационную поверхность, элементы памяти, установленный на схвате щуп отметчик, дисплей и блок управления l , Однако данное устройство сложно и имеет значительные вес и габариты Наиболее близким технически решением к изобретеншо является устрой ство, содержащее источник излучения генератор циклового опроса, датчики отраженного излучения, блок определе ния высоты объекта, блок определения конфигурации полостей объекта, задат чик типа материала, датчики проникающего излучения, блок определения. затухания излучения, блок определения толщины объекта и конвейер 2 . Недостатком известного устройства является его сложность, обусловленная необходимостью использования , группы датчиков отраженного излучения, группы датчиков проникающего излучения и источника излучения с большой поверхностью излучения, которая должна перекрьпзать группы указанных датчиков. Это связано с применением источника излучения большой радиоактивности, что делает опасным использование указанного устройства на практике. Цель изобретения - упрощение и улучшение эксплуатационных характеристик устройства. Поставленная цель достигается тем что в устройство, содержащее источник, излучения, два приемника излучения и по каждой регулируемой координате исполнительного органа робота последовательно соединенные первые усилитель и привод, связанный с первым датчиком положения, выход которо го подключен к первому входу первого усилителя, введены по каждой регулируемой координате исполнительного органа первьй нуль-орган, а также источник опорного сигнала, второй и третий приводы, последовательно соединенные первые интенсиметр, сумматор и ключ, последовательно подключе ные вторые ннтенсиметр, сумматор и ключ, последовательно соединенные первый элемент И, коммутатор и блок задания программы, последовательно подкшоченные пороговьй элемент, второй элемент И и третий ключ, последовательно соединенные вторые датчик положения, усилитель и нуль-орган, четвертый ключ, а также последовательно подключенные третьи датчик положения, усилитель и нуль-орган, первые, второй и третий выходы блока задания программы соединены с вторыми входами соответствующих усилителей, первые, второй и третий входы первого элемента И подключены к вы- . ходам соответствующих нуль-органов, аВЫХОД - к вторым входам первого и второго ключа и второго элемента И, соединенного выходом с первым входом четвертого ключа, второй вход первого су матора подключен к выходу источника опорного сигнала, а выходк входу порогового элемента и второму входу второго сумматора, выходы второго и третьего усилителей соединены с входами соответствующих приводов, связанных с соответствующими датчиками положения, выходы которых подключен к вторым В)Ходам третьего и четвертого ключа соответ-, ственно, выхода.1 первого и второго приемника излучения соединены с входами соответствующих интенсиметров, выходы первого, второго, третьего и четвертого ключа подключены к соответствуклцим выходам устройства5 причем источник излучения и первый приемник излучения установлены в схвате исполнительного органа, а второй приемник излучения - на подвижной каретке. На чертеже приведена функциональная схема устройства. В устройстве содержатся каретка 1, блок 2 задания программы, коммутатор 3, первые усилители 4, первые приводы 5, схват 6, источник 7 излучения, первый и второй приемники 8 и 9 излучения соответственно, первый и второй интенсиметры 10 и 11 соответственно, исполнительный орган 12, первые датчики 13 положения, второй усилитель 14, второй привод 15, второй датчик 16 положения, третий усилитель 17, третий привод 18, третий датчик 19 положения, источник 20 опорного сигнала, первый и второй сумматоры 21 и 22 соответственно, первые, второй и третий нуль-органы 23, 24 и 25 соответственно, первый элемент И 26, первьй и второй ключи 27 и 28 соответственно, второй элемент И 29,
третий и четв(ртый к;почи 30 и 31 соoTBercTBe.HFio, пороговый элемент 32. г
Устройство работает следующим образом.
С блока 2 задания программы на 5 приводы 5 испйлнительного органа 12 и приводы 15 и 18 каретки 1 подаются сигналы, по которым схват 6 и каретка 1 выходят в заданное программой положение. Отработка программы осуществляется в следящем режиме путем сравнения заданного положения, поступающего на усилители 4, 14 и 17, и текущего положения, которое подается на вторые входы усилителей 4,5 14 и 17 соответственно с датчиков 13, 16 и 19 положения. При отработке задания (кадра программы) с выхода усилителей 4, 14 и 17 снимаются сигняды рассогласования, которые пода- 20 ются на приводы 5, 15 и 17 соответственно. При значении рассогласования между заданным положением и текущшзначением, равным нулю, с выходов нуль-органов 23-25 снимаются сигналы,25 которые подаются на элемент И 26. При наличии сигналов на всех входах элемента И 26 с его выхода снимается сигнал конца отработки одного кадра программы, который подается через 30 коммутатор 3 кадров. Сигнал с коммутатора 3 кадров воздействует на блок 2 задания программы так, что с его выхода на входы усилителей 4 исполнительного органа 12 робота, уси- 35 лители 14, 17 каретки 1 подается нов.ое задание, которое отрабатьшается приводами 5, 15 и 18 в следующем кадре программы. При выводе схвата 6 и каретки 1 в заданное положение с 40 выходов устройства снимаются сигналы: с сумматора 21 - о высоте предмета 33, с выхода сумматора 22 - сигнал о толщине предмета 33 с учетом его внутренней геометрии (наличия пустот 45 и т.п.), с выходов датчика 16 и 19 положения - координаты точки, для которой снимаются указанные сигналы.
Осуществляя сканирующее перемещение относительно предмета 33 на одноЙ50 и той же высоте относительно рабочей поверхности, схват 6 и каретка 1 синхронно проходят все точки рабочего пространства, в котором находится предмет 33. При этом каретка 1 пере- 55 мещается в процессе работы так, что приемник 9 проникающего излучения устанавливается при сканировании предмета 33 напротив источника 7 излучен Источник 7 излучения излучает сигнал который, отразившись от предмета 33, попадает в приемник 8. Одновре Ченно излучение от источника 7 проходит через предмет 33 и попадает в приемник 9 проникающего излучения. Приемники 8 и 9 преобразовывают кванты ионизирующего излучения в электрические импульсы. При попадании предмета 33 в зону действия источника 7 излучения с выхода приемника 8 отраженного излучения снимается сигнал, который несет информацию о высоте предмета относительно рабочей поверх,ности. Для получения данных о внешне форме предмета 33 электрические сигнлы с выхода приемника 8 отраженного излучения поступают на интенсиметр 1 с выхода которого сигнал подается на сумматор 21. На второй вход сумматора 21 с выхода источника 20 опорного сигна.па подается сигнал, уровень которого предварительно задается. Этот уровень соответствует величине отраженного сигнала на выходе приемника 8 для случая, когда предмет 33 находится вне зоны действия источника 7 излучения.
Указанный уровень постоянен, так как схват 6 осуществляет сканирующее перемещение на одной и той же высоте относительно рабочей поверхности. Таким образом, при попадании предмета 33 в зоцу действия источника 7 с выхода сумматора 21 снимается сигнал разности между опорным напряжением и сигналом, снижаемым с интенсйметра 10, который несет информацию о внешней форме предмета 33.
Одновременно излучение от источника 7 проходит через предмет 33 и попадает в приемник 9. Электрические сигналы с выхода приемника 9 поступают на интенсиметр 11. Напряжение, снимаемое с интенсйметра 11 несет информацию о толщине предмета 33 с учетом наличия в кем полостей и т.п. Сигналы , регистрируемые приемником 9 излучения, измеряются по формуле
.rVe- %
где NO - поток излучения источника
излучения 7,
t - толщина предмета 33, U - коэффициент ослабления излучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программирования промышленного робота | 1985 |
|
SU1277068A1 |
| Устройство для формирования информационного сигнала адаптивного робота | 1982 |
|
SU1062642A1 |
| Устройство для управления транспортным роботом | 1985 |
|
SU1247838A1 |
| Устройство для управления манипулятором | 1979 |
|
SU930256A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1414624A1 |
| Устройство для управления приводом промышленного робота | 1978 |
|
SU729546A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для программного управления промышленным роботом | 1987 |
|
SU1449272A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДЦАПТИВНЬМ РОБОТОМ, содержащее источник излучения, два приемника излучения и по каждой регулируемой координате исполнительного органа робота последовательно соединенные первые усилитель и привод, связанный с. первым датчиком положения, выкод которого подключен к первому входу первого усилителя, чающее с я тем, что, с целью упрощения устЬойства, оно содержит по каждой регулируемой координате исполнительного органа первый нуль-орган, а также источник опорного сигнала, второй и третий приводы, последовательно соединенные первые интенсиметр, сумматор и ключ, последовательно подключенные вторые интенсиметр, сумматор и ключ, последовательно соединенные первый элемент И, коммутатор и блок задания программы, последовательно подключенные пороговый элемент, второй элемент И и третий ключ, последовательно соединенные вторые датчик положения, усилитель и нуль-орган, четвертый ключ, а также последовательно подключенные третьи датчик положения, усилитель и нуль-орган, первый, второй и третий выходы блока задания програмьал соединены с вторь ми входами соответствующих усилителей, первый, второй и третий входы первого элемента И подключены к выходам соответствукяцих нуль-органов, а выход - к вторым входам первого и второго ключа и второго элемента И, соединенного выходом с первым входом четвертого ключа, второй вход первого сумматора подключен (Л к выходу источника опорного сигнала, а выход - к входу порогового элемента и второму входу второго сумматора, выходы второго и третьего усилителей соединены с входами соответствующих приводов, связанных с соответствующими датчиками положения, сд |выходы которых подключены к вторым о входам третьего и четвертого ключа 9д соответственно, выходы первого и второго приемника излучения соединены с входами соответствующих интенс1В4ета ров, выходы первого, второго, третьего и четвертого подключены к .соответствукнцим выходам устройства, причем источник излучения и nepsbdl приемник излучения установлены в схвате исполнительного органа, а второй приемник излучения - на подвижной каретке.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очувствленный робот | 1973 |
|
SU474435A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU618279A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
