Изобретение относится к электромашиностроению, а именно к устройствам безразборного контроля мертвых ходов механизмов электроприводов.
Целью изобретения является упрощение и повышение быстродействия безразборного контроля мертвого хода при сохранении точности
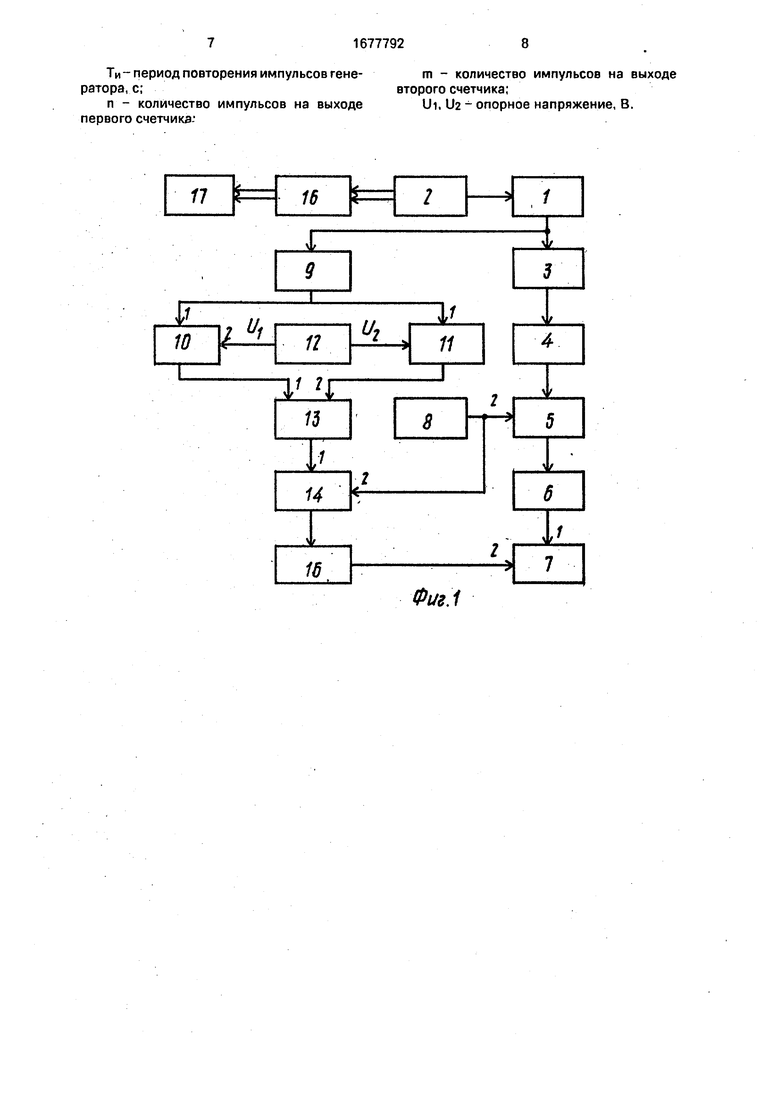
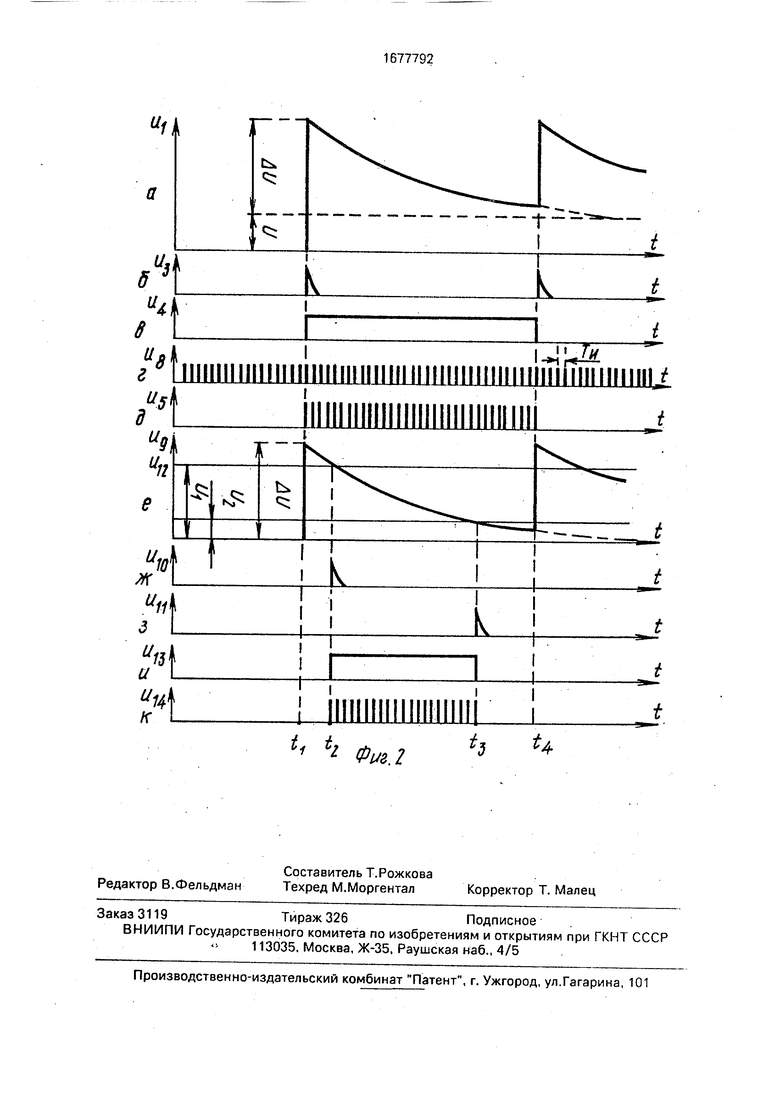
На фиг.1 изображена структурная схема устройства для контроля мертвого хода механической передачи электропривода; на фиг.2 - временные диаграммы работы устройства.
Устройство содержит последовательно соединенные датчик 1 якорного тока электродвигателя 2, формирователь 3 импульсов, первый триггер 4, первый логический элемент И 5, первый счетчик 6 с индикацией и вычислитель 7. Второй вход логического элемента И 5 подключен к выходу генератора импульсов 8. Кроме того, устройство содержит нормирующий узел 9, вход которого
подключен к выходу датчика 1, а выход соединен с первыми входами компараторов 10 и 11, источник опорных напряжений 12, выходы которого подключены соответственно к вторым входам компараторов 10 и 11, второй триггер 13, первый вход которого соединен с выходом первого компаратора 10, а второй - с выходом второго компаратора 11, второй логический элемент И 14, первый вход которого подключен к выходу второго триггера 13, а второй - к выходу генератора импульсов 8. Второй счетчик с индикацией 15 входом соединен с выходом второго логического элемента И 14, а выходом подключен ко второму входу вычислителя 7. Электродвигатель 2 через механическую передачу 16 соединен с нагрузкой 17.
Устройство работает следующим образом.
Перед началом процесса измерения мертвый ход а механической передачи 16
СО
с
о
XI
XI XI ю го
устанавливают в максимальное положение. Генератор импульсов 8 вырабатывает импульсы Us(t) с периодом следования Ти (см. фиг.2,г), которые подаются на второй вход логического элемента И 5 и на. второй вход логического элемента И 14. На первом входе логического элемента И 5 и первом входе логического элемента И 14 сигналов нет и они закрыты, так как на выходах триггеров 4 и 13 низкий потенциал. Источник опорных напряжений 12 вырабатывает два высокостабильных постоянных напряжения Ui и U2(Ui2(t) на фиг.2, е), напряжение Ui подается на второй вход первого компаратора 10, а напряжение Ua - на второй вход второго компаратора 11.
В момент времени ti (см. фиг.2) запускается приводной двигатель 2, возникает импульс пускового тока, который вызывает импульс напряжения на датчике 1 (см. фиг.2,a) lh(t)i U + Ди, где U - напряжение на датчике 1 в установившемся режиме работы двигателя 2 при холостом ходе, А О - приращение напряжения на датчике 1 в пусковом режиме. Фронт импульса напряже- ния датчика 1 подается на формирователь импульсов 3, где дифференцируется, усиливается и ограничивается. Сформированный импульс напряжения формирователя 3 из(м)(см, фиг.2,б) подается на вход триггера 4 и переводит его в состояние, характеризуемое высоким потенциалом на входе U/i(ti) (см. фиг.2,в). С выхода триггера 4 высокий потенциал U4(ti) подается на первый вход логического элемента И 5, который с момен- та времени ti пропускает импульсы, вырабатываемые генератором импульсов 8, на счетчик 6 (см. фиг.2,д). Кроме того, сигнал с датчика 1 вида lh(t) Д1Г1е/Тдв + U поступает на нормирующий узел 9, на выходе кото- рого формируется сигнал (см. фиг.2,е).
t
U9(t)AU ТДВ (1)
С выхода нормирующего узла 9 сигнал по- ступает на первые входы компараторов 10 и 11, но сигнал на их выходах отсутствует, так как в момент времени ti выполняется условие Ug(t) Ли Ui U2 (см. фиг.2,е).
В интервале времени ti t ta (см. фиг.2) двигатель 2 приходит во вращение, пусковой ток и напряжение на датчике 1 lM(t) уменьшается по экспоненте, стремясь к установившемуся значению U (см. фиг.2,а). Тихоходный вал механической пе- редачи 16 не двигается, так как мертвый ход не выбран. Напряжение на выходе нормирующего .узла Ug (t) уменьшается по экспоненте (см. фиг.2,е), стремясь к нулю, но в
рассматриваемом интервале времени выполняется неравенство Ugfri t ta) Ui Da, поэтому на выходах кймпараторов 10 и 11 сигналов нет. Счетчик 6 производит счет импульсов, поступающих с генератора 8 через открытый логический элемент 5.
В момент времени t2 (см. фиг.2) сигналы на первом и втором входах компаратора 10 становятся равными Ugfta) Ui (см. фиг.2,е) и на его выходе (см. фиг.2,ж) формируется сигнал Uio(t2), который подается на первый вход триггера 13 и переводит его в состояние, характеризуемое высоким потенциалом на выходе Ui3(t2) (см. фиг.2,и). С выхода триггера 13 высокий потенциал Uis(t2) поступает на первый вход логического элемента И 14, который с момента времени t2 пропускает импульсы, вырабатываемые генератором импульсов 8, на счетчик 15, который начинает счет импульсов (см. фиг.2,к). Счетчик б продолжает счет импульсов, поступающих через открытый логический элемент И 6 с генератора импульсов 8.
В интервале времени t2 t 13 (см. фиг.2) двигатель 2 продолжает вращенме, тихоходный вал механической передачи 16 остается неподвижным, так как мертвый ход не выбран. Напряжение Ui(t) на датчике 1 (см. фиг.2,а) и напряжение (Ug(t) на выходе нормирующего узла 9 (см. фиг.2,е) уменьшается по экспоненте. В рассматриваемом интервале времени выполняется неравенство Ug(t2 t ta) Ua, поэтому на выходе второго компаратора 11 сигнала нет, состояние элементов схемы не изменяется и счетчики 6 и 15 производят счет импульсов, поступающих с генератора 8 через открытые логические элементы И 5 и 14 соответственно.
В момент времени ts (см. фиг.2) еигналы на первом и втором входах компаратора 11 становятся равными Ug(t3) U2 (см. фиг.2.е) и на его выходе (см. фиг.2,ж) формируется сигнал Un(t3), который подается на второй вход триггера 13 и переводит его в состояние с низким потенциалом на выходе (см, фиг.2,и), закрывается логический элемент И 14, поступление импульсов на счетчик 15 прекращается (см. фиг.2,к). В счетчике 15 записано число импульсов т, сосчитанное за время
t3 - tz тТи(2)
которое подается на второй вход вычислителя 7. Логический элемент И 5 открыт, и счет- чик 6 продолжает счет импульсов, поступающих с генератора 8 (см. фиг.2,д).
В интервале времени ta t t4 (см. фиг.2) двигатель 2 продолжает вращение, тихоходный вал механической передачи 16 остается неподвижным, так как мертвый ход не выбран. Напряжение на датчике 1 (см.
фиг.2,а) уменьшается по экспоненте, состояние элементов схемы не изменяется и счет- чик 6 продолжает счет импульсов, поступающих с генератора 8 через открытый логический элемент И 5 (см. фиг 2,д).
В момент времени ц мертвый ход выбран, приводится во вращение тихоходный вал механической передачи 16, нагрузка на двигатель 2 скачкообразно возрастает, это вызывает импульс напряжения на датчике 1 1)4(т.4)(см. фиг.2). Импульс напряжения датчика 1 IMfa) поступает на формирователь 3, который на выходе вырабатывает второй импульс 1)з(Х4)(см. фиг.2,б), поступающий на вход триггера 4. Триггер 4 переходит в состояние с низким потенциалом на выходе U4(t4)(cM. фиг.2$), который подается на первый вход логического элемента И 5, он закрывается и счетчик 6 прекращает счет импульсов (фиг.2,д). В счетчике 6 записано число импульсов п. сосчитанное за время выбора мертвого хода а
t4 - t1 nTn,(3)
которое подается на первый вход вычислителя 7.
Величины напряжений Ut и U2. вырабатываемых источником опорных напряжений 12, известны и устанавливаются с высокой точностью из условия:
(4)
Период следования импульсов Ти, вырабатываемых генератором 8, также известны с высокой точностью. Величины Ui, 1)2, Ти, Qвводятся в вычислитель 7 заранее и остаются постоянными в процессе эксплуатации электропривода, а количество импульсов пит, сосчитанное счетчиками 6 и 15, вводится в вычислитель 7 каждый раз в процессе измерения мертвого хода а механической передачи 16 электропривода.
С учетом выражения (2) отношение напряжений будет иметь следующий вид:
у1 дие г2/Тдв тТи
U2 дц з/тдв
После логарифмирования и упрощения расчетная формула для определения постоянной времени электродвигателя 2 будет иметь следующий вид:
т п m Ти (и1/и2) С учетом выражения (6) вычислитель 7 реализует функцию вычисления мертвого хода
е ТДВ етДв,(5)
(6)
« 6ЙТ,
Vijn m
ln(Ui/U2
1-е
Јln(Ul/U2)3 (7)
где Q - номинальная скорость вращения двигателя 2, об/мин:
Тм-период повторения импульсов генератора 8, с;
5п - количество импульсов на выходе
счетчика 6;
m - количество импульсов на выходе счетчика 15;
Ui и Ua - напряжения источника опор10 ных напряжений 12, В;
При подстановке в формулу (7) величин в указанных размерностях результат вычисления мертвого хода а будет получен в градусах
15 Устройство позволяет увеличить быстродействие контроля мертвого хода а , так как исключена необходимость решения численным методом трансцендентного уравнения. Время расчета мертвого хода а по
20 выражению (7) вычислителем 7, реализованным на том же микропроцессорном комплекте серии КР580, не превышает 1 с. Формула изобретения Устройство для контроля мертвого хода
25 механической передачи электропривода, содержащее последовательно соединенные датчик якорного тока электродвигателя, формирователь импульсов, первый триггер, первый логический элемент И, первый счет30 чик с индикацией и вычислитель, второй вход первого логического элемента И подключен к выходу генератора импульсов и ко второму входу второго логического элемента И, первый вход которого соединен с вы35 ходом второго триггера, выход второго логического элемента И через второй счетчик с индикацией подключен ко второму входу вычислителя, отличающееся тем, что, с целью упрощения и повышения быст40 родействия безразборного контроля мертвого хода при сохранрнии точности, в него введены нормирующий узел, источник опорных напряжений и два компаратора, первые входы которых объединены и под45 ключены к выходу нормирующего узла, вход которого соединен с выходом датчика якорного тока электродвигателя, вторые входы компараторов подключены к соответствующим выходам источника опорных напряже50 ний, выход каждого компаратора соединен с соответствующим входом второго триггера, а вычислитель реализует функцию
a 6QTj, m
Ј InCUi/l)1
1-е
(U1/U2)
где Q - номинальная скорость вращения электродвигателя, об/мин;
Ти-период повторения импульсов гене-т - количество импульсов на выходе
ратора, с;второго счетчика;
п - количество импульсов на выходеUi, U2 - опорное напряжение, В.
первого счетчика
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля мертвого хода механической передачи электропривода | 1988 |
|
SU1557633A1 |
| Электропривод постоянного тока с двухступенчатой механической передачей | 1986 |
|
SU1410250A1 |
| Электропривод постоянного тока | 1985 |
|
SU1277301A1 |
| Устройство для сварки | 1988 |
|
SU1539014A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Устройство для измерения механических величин | 1989 |
|
SU1737287A1 |
| Устройство для получения сварочного импульса | 1986 |
|
SU1393564A1 |
| Устройство для сварки | 1987 |
|
SU1459842A1 |
| Устройство для контроля логических блоков | 1988 |
|
SU1624458A1 |
| Устройство для сварки | 1987 |
|
SU1555078A1 |
Изобретение относится к электромашиностроению, а именно к устройствам безразборного контроля мертвых ходов механизмов электроприводов. Целью изобретения является упрощение и повышение быстродействия безразборного контроля мертвого хода при сохранении точности. Устройство содержит датчик якорного тока двигателя, формирователь импульсов, два триггера, два логических элемента И, два счетчика, генератор импульсов (ГИ), нормирующий узел, два компаратора, источник опорных напряжений (ИОН) и вычислитель, реализующий вычисление мертвого хода а по формуле, приведенный в описании изобретения. Быстродействие достигается за счет исключения необходимости решения численным методом трансцендентного уравнения. 2 ил.
Фиг.1
un
ut
и.
8 a
I
1
i
в
iiiiiiiiiiMiiiiimiMiMiiiiiiiiiiiMiiiiiiMiiiiTinnMiiiiiiir
и к
П i
IIIIIIIIHIIIIIIIIIII
f
l Фм.г
1
i
t:
и
| Электропривод постоянного тока | 1985 |
|
SU1277301A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля мертвого хода механической передачи электропривода | 1988 |
|
SU1557633A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
