Изобретение относится к электромашиностроению, а именно к устройствам измерения мертвого хода механизмов электроприводов постоянного тока.
Цель изобретения - повышение точности безразборного контроля мертвого хода,
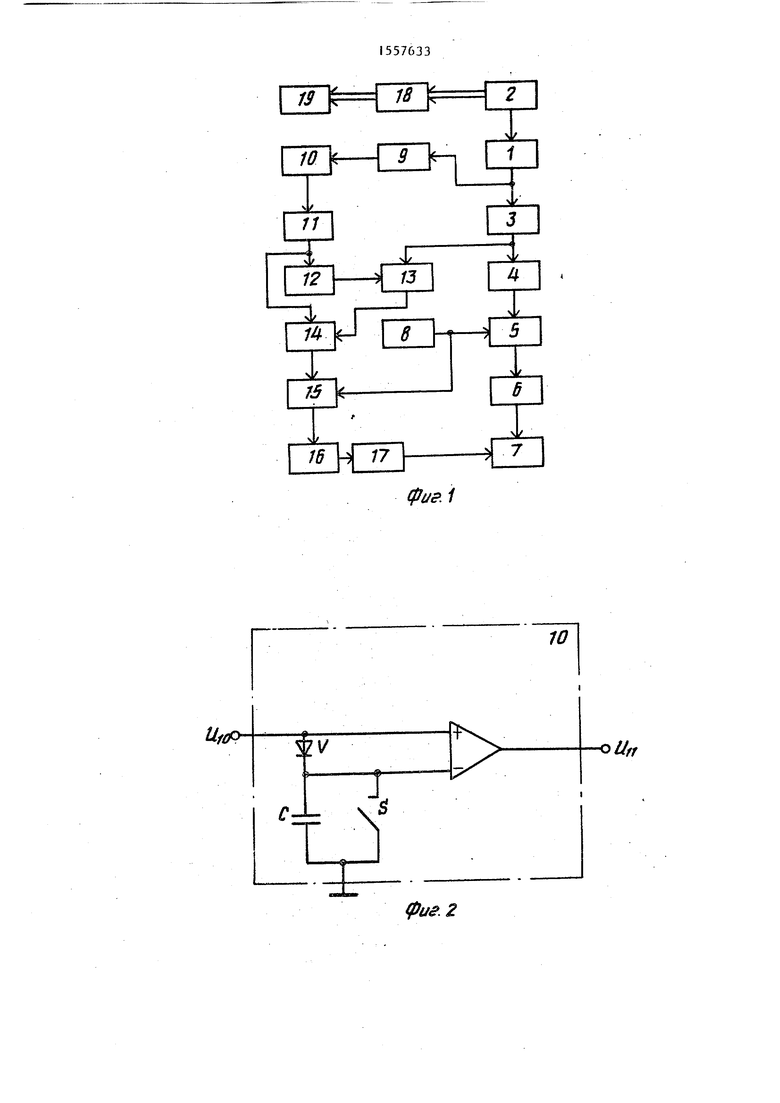
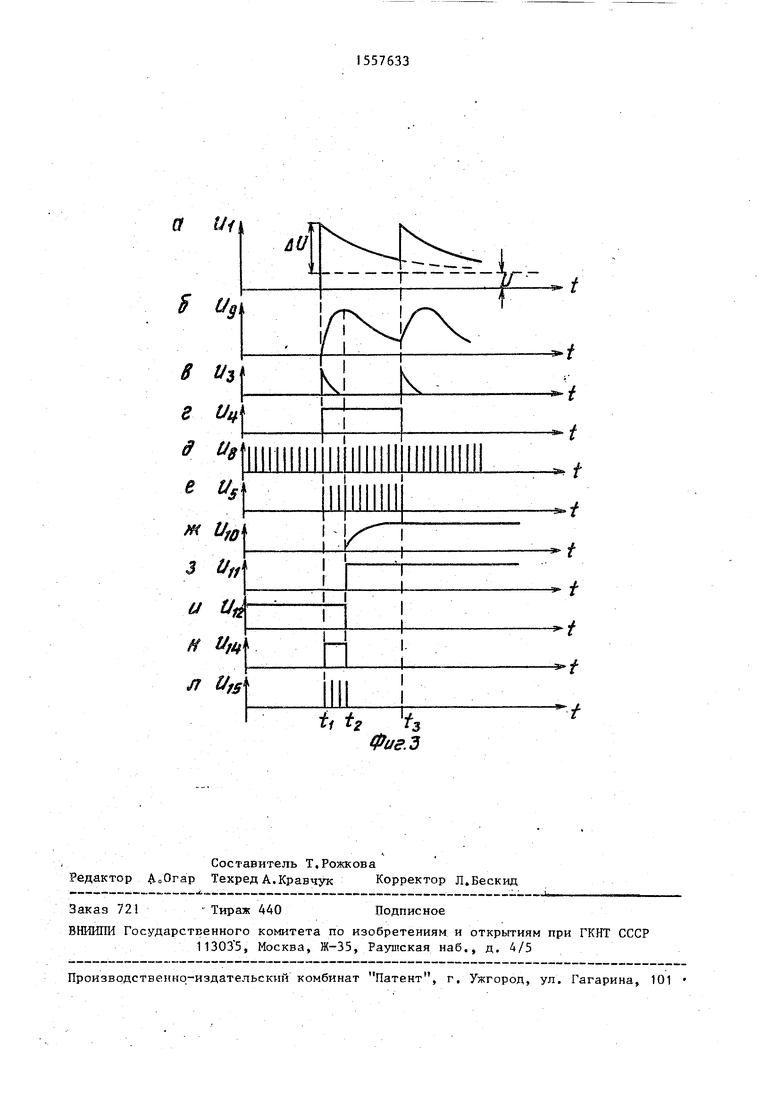
На фиг.1 представлена блок-схема устройства для контроля мертвого хода механической передачи; на фиг,2 - электрическая схема индикатора экстремума напряжения; на фиг.З - временные диаграммы работы устройства.
Устройство для контроля мертвого хода механической передачи электропривода содержит последовательно соединенные датчик 1- якорного тока электродвигателя 2, формирователь 3 им-. пульсов триггер 4, логический элемент И 5, счетчик 6 с индикацией и вычислитель 7. Второй вход логическо-
го элемента И 5 подключен к выходу генератора 8 импульсов. Кроме того, устройство содержит последовательно соединенные интегрирующую цепь 9, узел 10 выявления экстремума напряжения, электронный клпч 11, инвертор 12, второй логический элемент И 13, второй триггер 145третий логический элемент И 15, второй счетчик 16 с индикацией и второй вычислитель 17. Вход интегрирующей цепи 9 подключен к выходу датчика 1 якорного тока электродвигателя, выход электронного ключа 11 соединен с вторым входом второго триггера 14. Выход формирователя 3 импульсов подключен к второму входу второго логического элемента И 13, Выход генератора 8 импульсов подключен к второму входу третьего логического элемента И 15. Первый вычислитель 7 снабжен вторым входом,
ел ел м
о
00 00
подключенным к выходу второго вычислителя 17. Электродвигатель 2 через механическую передачу 18 соединен с нагрузкой 19.
Устройство работает следующим образом.
Перед началбм процесса измерения мертвый ход &i механической передачи 18 устанавливают в максимальное положение. Запоминающий конденсатор( С индикатора 50. экстремума напряже ния (фиг,2) ключом S предварительно разряжают. Генератор 8 импульсов вырабатывает импульсы и8 с периодом следо- вания Тц (фиг.Зд), которые подаются на второй .вход логического элемента И 5 и на второй вход логической схемы И 15, На первом входе логического элемента, И 5 и на первом входе логи- ческой схемы И 15 сигналов нет, и они закрытм, так как на выходах триггеров 4 и 14 присутствуют низкий потенциал. На второй вход логического элемента И 13 подается высокий потенциал и (Ј (фиг.Зн), но на первом входе логического элемента И 13 потенциал низкий и он закрыт.
Б момент времени t (фиг.З) запускается приводной двигатель 2. В обмотке якоря двигателя 2 возникает импульс пускового тока, который вызывает импульс напряжения на датчике 1 u(t)U + utT, где U - напряжение на датчике 1 в установившемся- режиме работы двигателя 2 при холостом ходе; &U - приращение напряжения на датчике 1 в пусковом режиме. Фронт импульса напряжения датчика 1 подается на формирователь 3 импульсов, - где дифференцируется, усиливается и ограничивается. Сформированный-импульс напряжения формирователя 3 u3(t,) подается на вход триггера 4 и переводит его в состояниег характериэуе- мое высоким потенциалом на выходе U4.(tj). С выхода триггера 4 высокий потенциал u$(t,) подается на первый вход логического элемента И 5, который с момента времени t пропускает импульсы, вырабатываемые генератором 8 импульсовг на счетчик 6, который начинает счет импульсов„ Выходной сигнал интегрирующей КС-цепи 9 в момент времени t, остается равным нулю: Uq(t)0, следовательно, выходные ( сигналы индикатора 10 экстремума напряжения и электронного ключа 11 остаются равными нулю: u 0(ti)0 и
u 44 (Ц )0 а на выходе инвертора 12 остается высокий потенциал 111г(1:), который поступает на второй вход логического элемента И 13. На первый вход логического элемента И 13 в момент времени tf поступает импульс u(tt) с формирователя 3 импульсов, и логический элемент И 13 пропускает его на второй вход триггера 14 и переводит его в состояние, характеризуемое высоким потенциалом на выходе ). c выхода триггера 14 высокий потенциал ) подается на первый вход логического элемента И 15, который с момента времени t, пропускает импульсы, вырабатываемые генератором 8 импульсов, на счетчик 16
который начинает счет импульсов. I
- , В интервале времени t, ; t t
(фиг.З) двигатель 2 приходит во вращение, пусковой ток и напряжение на датчике 1 u( уменьшается по экспоненте. Тихоходный вал механической передачи 18 не двигается, так как мертвый ход не выбран. Счетчик 6 производит счет импульсов, пос гупающих с генератора 8 импульсов, через открытый- логический элемент 5. Входной сигнал счетчика и6 показан на фиг.Зе. В интервале времени t t с t выходной сигнал интегрирующей цепи 9 и на- нарастает.
Выходной сигнал датчика I имеет
вид u,(t) &U по Лапласу
Ае
+U, его изображение
u /чч - J&J.UL. +
U(S) 1 +TAB-S s
где S - оператор Лапласа,
Передаточная функция интегрирую-, щей RS-цепи 9 имеет вид
W(S)
J
i -ГтхГ
)
где - рассчитанная и известная с высокой степенью точности постоянная времени интегрирующей НС-цепи 9.
Величина постоянной времени Т интегрирующей КС-цепи 9 выбирается из условия Тде т.
Изображение по Лапласу выходного сигнала интегрирующей КС-цепи 9 имеет вид
«, (S 7 ит s) (T+f s У + sTT+TsT
Выполнив обратное преобразование Лапласа, находим оригинал мгновенного значения выходного сигнала и л (г) интегрирующей КС-цепи 9:
«,0-з ( -е 4ТД& Т
i + U( ) -(1)
) +
Взяв первую производную от выражения (l), приравняв ее нулю, после преобразований получаем трансцендентное выражение для определения времени достижения экстремума t3 (фиг.36)
гналом UQ
интегрирующей
(- ТАЬ т
гп гр
Tv+Ss E А кп
Ъ
гдеК &и/и- кратность пускового напряжения на датчике 1 в режиме холостого хода двигателя 2, величина Kfj определяется с высокой точностью перед установкой двигателя 2 в изделие t где он выполняет свои рабочие функции.
В интервале времени t( t Ј t выходной сигнал и у интегрирующей RC-цепи 9 апериодически нарастает до экстремального значения и поступает на индикатор 10 экстремума, электрическая схема которого представлена на фиг.2. Через диод V (фиг,2) заряжается запоминающий конденсатор С (фиг,2) до мгновенного значения выходного сигнала и- интегрирующей RC-цепи 9. Напряжения на обоих входах операционного усилителя (фиг.2) остаются одинаковыми и меняются синхронно, поэтому выходной сигнал и 10 (фиг.Зж) индикатора экстремума напряжения остается равным нулю, следовательно, в интервале времени t 4 i t : t счетчик 16 осуществляет счет импульсов, поступающих с генератора 8 импульсов. Через открытый логический элемент
И 15, Входной сигнал счетчика 16 показан на фиг.Зл,
При t t мгновенное значение выходного сигнала UQ (фиг.Зб) интегрирующей RC-цепи 9 становится меньше экстремального значения, диод V (фиг,2) индикатора 10 экстремума напряжения закрывается, так как напряжение на запоминающем конденсаторе С (фиг,2) становится больше выходного сигнала и и
1557631
10
и
15
20
интегрирующей RC-цепи 9. На выходе операционного усилителя (фиг,2) индикатора 10 -экстремума напряжения появляется выходной сигнали 0 (фиг.Зж), который подается на электронный ключ 11 и переводит его в состояние, характеризуемое высоким потенциалом на выходе i ц (фиг.Зз), Выходной сигнал с электронного ключа 11 поступает на первый вход триггера 14 и инвертор 12, который закрывает логический элемент И 13 по второму входу. Триггер 14 переходит в состояние с низким потенциалом на выходе и, (фиг.Зк), закрывает логический элемент И 15. Поступление импульсов с генератора 8 импульсов н вход счетчика 16 прекращается (фиг.Зл). В счетчике 16 записано число импульсов т, сосчитанное за время достижения экстремума выходным сигналом и9 (фиг.Зб) интегрирующей RC-цепи 9:
t у - t
t-i tnT,
И
(3)
5
которое подается на вычислитель 17,
Вычислитель 17 по известным значениям Ц, Т и К п производит расчет численным методом величины Тдц из
0 трансцендентного выражения (2) , При подстановке в выражение (2) Т и Сэ в секундах результат определения электромеханической постоянной времени двигателя Тд6 получают также в
секундах. Величина Тде из вычислителя 17 поступает в вычислитель 7. В интервале времени С с t - tъ (фиг.З) двигатель 2 продолжает вращение, пусковой ток и напряжение на
Q датчике 1 и продолжает уменьшаться по экспоненте (фиг.За), тихоходный вал механической передачи 18 остается неподвижным, так как мертвый ход еще не выбран. Счетчик 6 про5 должает счет импульсов, поступающих с генератора 8 импульсов через открытый логический элемент И 5, Входной сигнал u ) счетчика 6 показан на фиг.Зе.
В момент времени tj (фиг.З) мертвый ход выбран, приводится во вращение тихоходный вал механической передачи 18, нагрузка на двигатель 2 скачкообразно возрастает, что вызывает импульс тока якоря двигателя 2 и импульс напряжения на датчике 1 u,(t«,), фиг.За, Импульс напряжения датчика 1 поступает на формирователь 3 импульсов, который вырабатыва0
ет второй импульс u(tj,). Так как логический элемент И 13 закрыт, то импульс u.j(t-}) с формирователя 3 импульсов поступает только на триггер 4 и переводит его в состояние нулевого потенциала на выходе и4(ц), фиг.Зг, Нулевой потенциал выхода триггера 4 подается на логический элемент И 5 и закрывает его0 Поступление импульсов Ug (фиг.Зд) с генератора 8 импульсов на вход счетчика 6 прекращается, В счетчике 6 записано число , импульсов п, сосчитанное за время выбора мертвого хода сЈ
пТи,(4)
ча ч и
которое подается на вычислитель 7, Вычислитель 7 реализует функцию вычисления мертвого хода
njrt
d ( ТАВ),
(5)
25
где ST. - номинальная скорость вращения двигателя 1, об/мин{ Тдв- электромеханическая постоянная времени двигателя 1, с; Ти - период повторения импульсов
генератора 8, с1,
п - количество импульсов, сосчитанное счетчиком 9, - вели- 30 чина безразмерная. При подстановке в формулу (5) величин в укааанных размерностях результат вычисления мертвого хода получают в градусах 35
Формула изобретения
Устройство для контроля мертвого хода механической передачи электропри-дд вода, содержащее последовательно соединенные датчик якорного тока-электро- двигателя, формирователь импульсов, триггер, логический элемент И, счетчик с индикацией и вычислитель, вто- 45 рой вход логического элемента И под2Q
5
ключен к выходу генератора импульсов, а вычислитель реализует функцию
A- VTAB ),
отличающееся тем, что, с целью повышения точности безразборного контроля мертвого хода, в него введены последовательно соединенные интегрирующая цепь, узел выявления экстремума напряжения, электронный ключ, инвертор, второй логический элемент И, второй счетчик с индикацией и второй вычислитель, вход интегри5 рующей цепи подключен к выходу датчика якорного тока электродвигателя, выход электронного ключа соединен с вторым входом второго триггера, выход формирователя импульсов подключен к
Q второму входу второго логического элемента И, выход генератора импульсов подключен к второму входу третьего логического элемента И, первый вычислитель снабжен вторым входом, подключенным к выходу второго вычислителя, реализующего функцию
TAa+lASLlI
JLJAfe. 1п (
Че -тт
),
де об - мертвый ход;
Q - номинальная скорость вращения электродвигателя; электромеханическая постоянная времени электродвигателя ;
период повторения импульсов генератора импульсов; количество импульсов, подсчитанных первым счетчиком; время достижения экстремума напряженияJ постоянная времени интегрирующей цепи;
кратность пускового напряжения электродвигателя.
А8
И
п -
t -
Т к. fpi/f.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля мертового хода механической передачи электропривода | 1989 |
|
SU1677792A1 |
| Электропривод постоянного тока с двухступенчатой механической передачей | 1986 |
|
SU1410250A1 |
| Устройство для измерения мощности двигателя | 1982 |
|
SU1030678A1 |
| Электропривод постоянного тока | 1985 |
|
SU1277301A1 |
| Устройство управления весовым порционнымдОзАТОРОМ | 1979 |
|
SU836532A1 |
| Управляемый вентильный электродвигатель | 1978 |
|
SU746827A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Устройство управления впрыском топлива | 1980 |
|
SU877105A1 |
| Устройство управления впрыском топлива в дизель-генератор | 1980 |
|
SU885588A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
Изобретение относится к электромашиностроению. Цель изобретения - повышение точности безразборного контроля мертвого хода - достигается за счет оперативного измерения электромеханической постоянной времени электродвигателя Тдв при измерении мертвого хода α в процессе эксплуатации электродвигателя. Электропривод дополнительно снабжен интегрирующей цепью, узлом выделения экстремума напряжения, электронным ключом, инвертором, двумя элементами И, триггером и счетчиком с индикацией. Для вычисления Тдв используется второй вычислитель, выходные данные которого применяются для коррекции расчета α первым вычислителем. 3 ил.
Uttf
7V
l
oUft
фиё.2
| Способ контроля кинематической погрешности зубчатых передач | 1977 |
|
SU896390A1 |
| Электропривод постоянного тока | 1985 |
|
SU1277301A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
