Изобретение относится к технике автоматического управления и регулирования электропривода постоянного тока и предназначено для точной обработки рабочим органом механизма заданного перемещения в течение заданного времени с минимальными потерями энергии в якорной цепи электродвигателя.
Целью системы является повышение экономичности при расширении области применения.
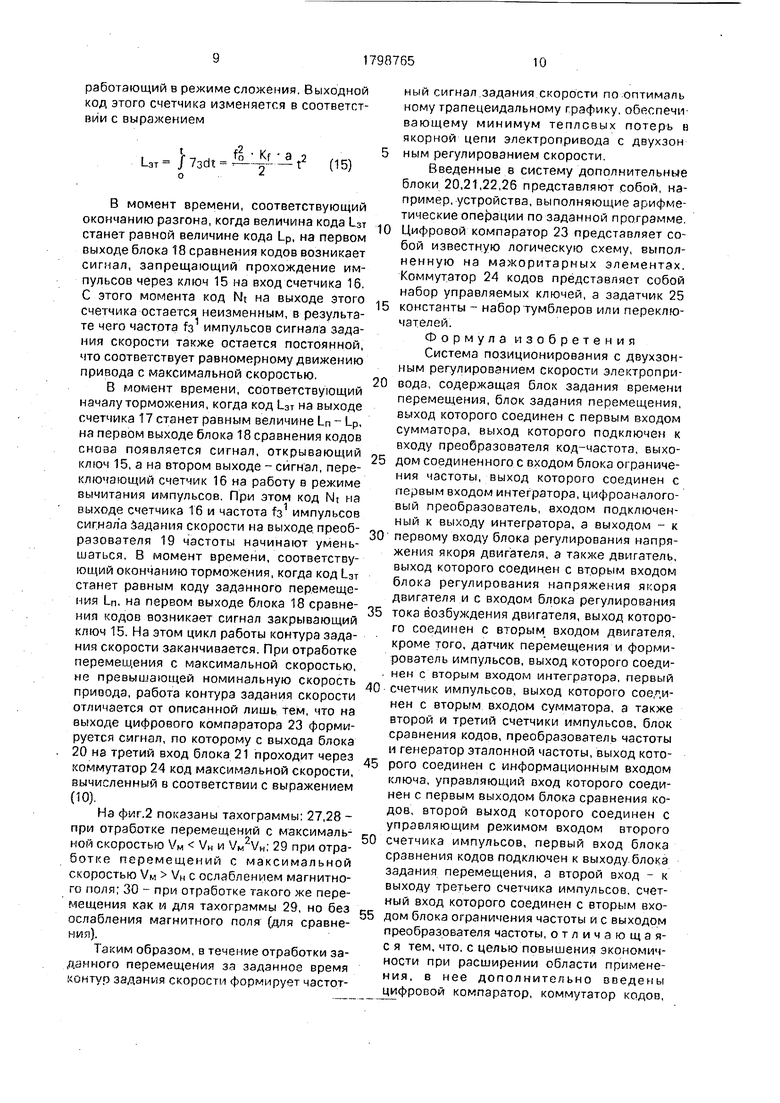
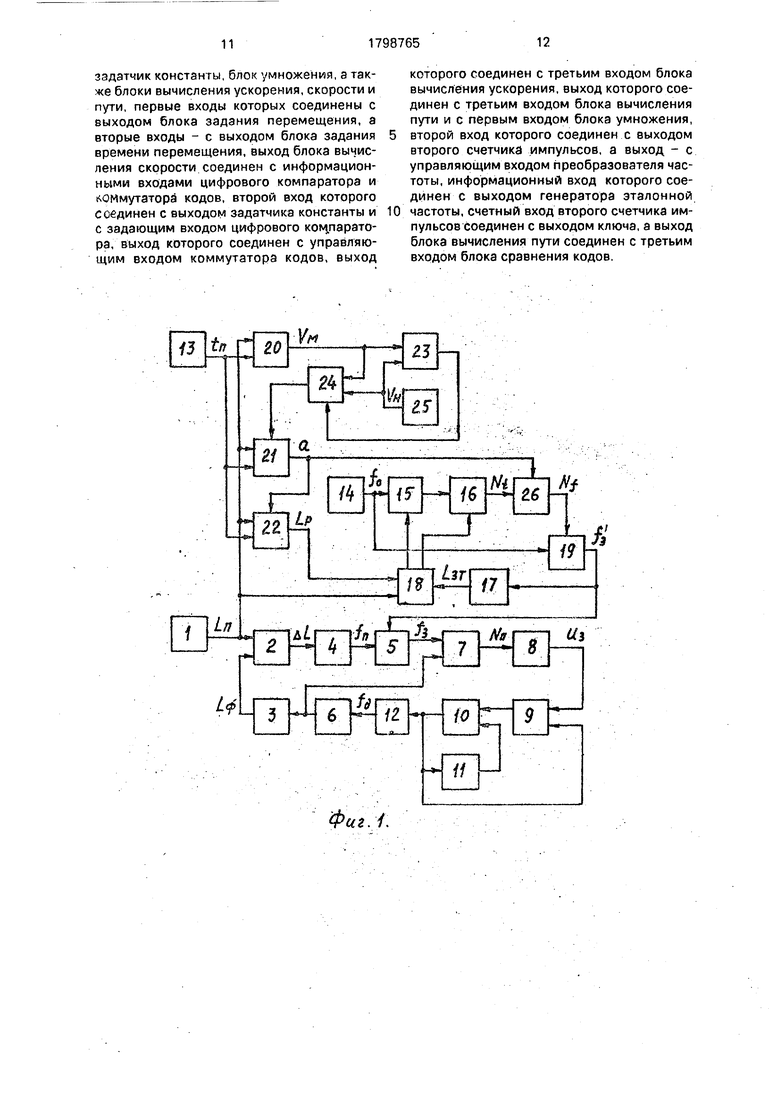
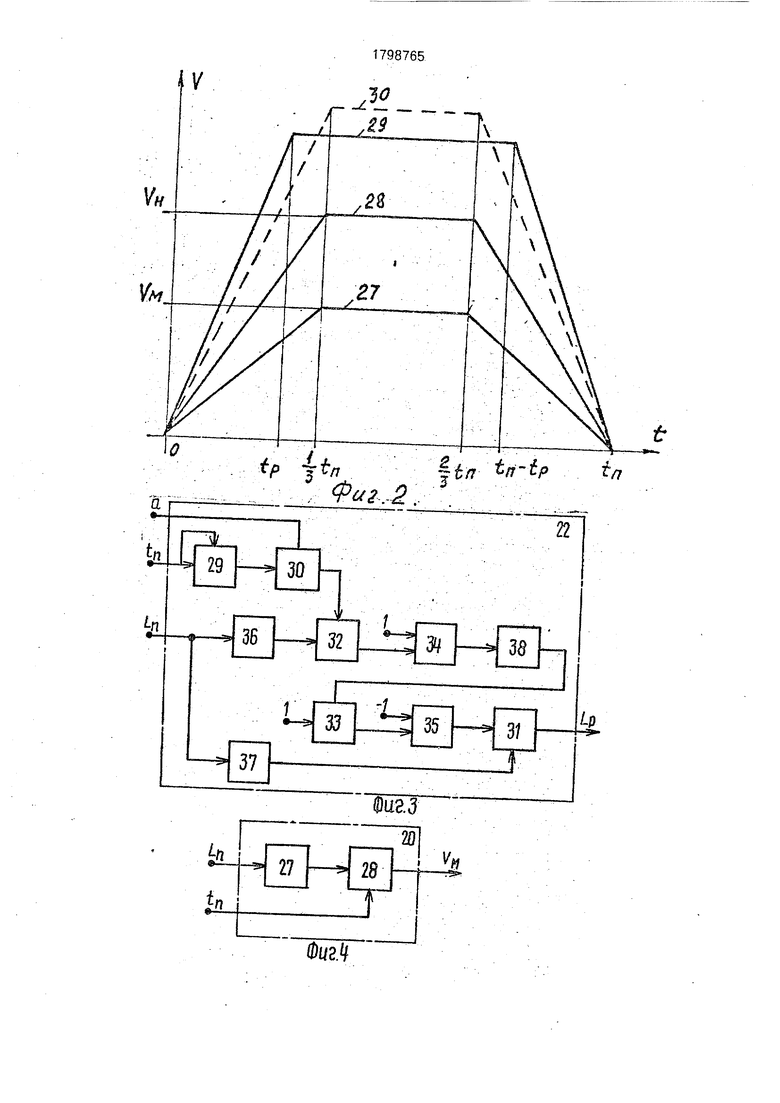
На фиг. 1 приведена функциональная схема системы; на фиг,2 - тахограмма привода при отработке различных перемещений за данное время перемещения; на фиг.3,4,5-1- примеры выполнения блоков, вычисления пути, скорости и ускорения.
Система содержит блок 1 задания перемещения, сумматор 2, первый счетчик 3 импульсов, преобразователь 4 код-частота, блок 5 ограничения частоты, формирователь 6 импульсов, интегратор 7, цифроаналого- вый преобразователь 8, блок 9 регулировэv4
Ю
СО
XI
Ov
СЛ
ния напряжения якоря двигателя, двигатель 10, блок 1.1 регулирования тока возбуждения двигателя, датчик 12 перемещения, блок 13 задания времени перемещения, генератор 14 эталонной частоты, ключ 15, вто- рой и третий счетчики 16,17 импульсов, блок 18 сравнения кодов, преобразователь 19 частоты, блок 20 вычисления скорости, блок 21 вычисления ускорения, бло.к 22 вычисления пути, цифровой компаратор 23, коммутатор 24 кодов,, задатчик 25 константы и блок 26 умножения, ;r i л t
Функциональная схема блока 20 вычисления скорости приведена на фигА Блок содержит масштабней элемент 27 и дели-
тель28.Г . - . - ,-. ..
Функциональная схема блока вычисления пути 22 приведена на фиг.З. Блок сод ер- жит умножители 29,30,31, делители 32,33, сумматоры 34 ,35, масштабные элементы 36,37 и элемент 38 квадратного корня. На выходе сумматора 34 формируется величи на подкоренного выражения в соотношении (4). На выходе сумматора 35 формируется величина, заключенная в скобки в соотно- шении (4), а на выходе умножителя 31 фор- мируется величина пути разгона (торможения) в соответствии с сЬотношени- ем(4).- v;,:,..-:.. :;;:-vV,; . :.--::-.:v;.-: .,
Функциональная схема блока вычисле- ния ускорения 21 приведена на фиг.5. Блок содержит умножители 39...59, масштабные элементы 60..65, сумматора 66,67, компараторы 68,69, одновибратор 70, генератор 71 импульсов, ключ 72, счетчик импульсов 73 и триггер 74. .
Система представляет собой многоконтурную систему автоматического регулирования и включает в себя: аналоговый контур регулирования, скорости, содержащий бло- ки 9,11 и двигатель 10; цифровой контур регулирования скорости, содержащий замкнутый аналоговый контур регулирования скорости, цифровой регулятор скорости, выполненный с помощью интегратора 7 и циф- роаналогового преобразователя 8, а также датчик 12 перемещения и формирователь 6 импульсов; цифровой контур положения, содержащий замкнутый цифровой контур регулирования скорости, регулятор положе- ния, выполненный с помощью сумматора 2, преобразователя 4 код-частоты и блока 5 ограничения частоты, а также первый счетчик 3 импульсов; контур задания скорости, содержащий блоки 14-26. Коды заданного перемещения и заданного времени перемещения формируются с помощью блоков 1 и 13 соответственно. ....
Снижение тепловых потерь в якорной цепи двигателя обусловлено следующим.
При отработке заданного перемещения путем изменения скорости механизма по любой симметричной трапецеидальной тахограмме имеет место соотношение:
Ln atp2 -t- atp(tn 2tp),
где Ln - заданная величина перемещения, tn - заданное время перемещения, а - ускорение при разгоне (торможении),
tp-время разгона (торможения). Из соотношения (1) величина ускорения определяется выражением
а - U ..
tp (tn -tp)
из которого можно найти величину времени разгона до максимальной скорости
tP y(1- 1
4U tn -a
(3)
и величину пути разгона до максимальной скорости
-1) (4)
При двухзонном регулировании скорости ток двигателя в первой зоне разгоне до номинальной скорости определяется выражением
-a(5) где k - коэффициент пропорциональности.
Ток двигателя во второй зоне при разгоне от номинальной до максимальной UM скорости определяется выражением
|2 k; ek fe t (6)
где V at - текущее значение скорости, t - текущее значение времени. Потери энергии в якорной цепи двигателя
Q 2гя (ti2 tH
f 22dt)
tH
(7),
где tH - время разгона привода до номинальной скорости.
Подставляя в (7) значение тока в соответствии с (5) и (6) и значение времени разгона в соответствии с (3), получим
Q 2r«(ii2tH+ / l22dt)
IH
V2
(3 а4 - 3 tn U Q3 - tЈ t2, V-, 4Ln
(8)
а4+цЛ2а- -а3+4У2-а)
Функция Q имеет экстремум по а и для определения оптимального значения ускорения, минимизирующего величину тепловых потерь, необходимо взять производную от выражения (8) и приравнять ее нулю
|-| 4tn2 (2tn3VH3 + U3) а4 - 25Ln (2tn3
VH3 + Ln3) a3 + 72tn Ln2VH3a2 + 4tn2V«6-a -16LnVH6 0
Оптимальное значение ускорения определяется из уравнения (9)также при отработке перемещений с максимальной скоростью, не превышающей значение VH. При этом в уравнении (9) вместо величины VH следует подставить значение максимальной скорости, вычисленное по известной формуле, приведенной в описании прототипа
VM
.1.5 Ln
tn
(10)
Справедливость этого утверждения можно легко проверить, подставив в нение (9) значение оптимального ускорения электропривода, работающего без ослабления поля, которое определяется по известной формуле, приведенной также в описании прототипа
4,5 Ц
.(11)
Система работает следующим образом. В исходном состоянии на выходе блока 1 задания перемещения код заданного перемещения равен нулю. Первый счетчик 3 импульсов и интегратор 7 находятся в нулевом состоянии, сигнал задания скорости на выходе цифроаналогового преобразователя 8 равен нулю и двигатель 10 электропривода находится в состоянии покоя.Блоком 11 регулирования тока возбуждения двигателя в обмотке возбуждения поддерживается ток, соответствующий номинальному потоку.
Введенный в блок 1 задания перемещения код 1л заданного перемещения подается на первый вход сумматора 2. На выходе
сумматора возникает код рассогласования Д, который подается на вход преобразователя 4 код-частота, имеющего линейную ха- рактеристику. На выходе преобразователя 5 возникают импульсы, следующие с частотой fn, величина которой пропорциональна коду рассогласования AL. Эти импульсы поступают на первый вход блока 5 ограничения частоты, на выходе которого возникают
10 импульсы, следующие с частотой fa равной частоте гз импульсов, поступающих на его второй вход с выхода блока 19 преобразоаа- теля частоты. Вырабатываемые блоком 5 импульсы суммируются в интеграторе 7, вы5 ходной код Nn которого преобразуется циф- роаналоговым преобразователем 8 в напряжение Уз задания скорости. Это напряжение подается на вход блока 9 регулирования напряжения якоря двигателя. При
0 этом двигатель начинает разгоняться, датчик 12 перемещения начинает выдавать импульсы, частоты fg следования которых пропорциональна скорости вращения Двигателя, Эти импульсы через формирователь
5 б подаются на второй вход интегратора 7 и являются сигналом обратной связи в цифровом контуре регулирования скорости. С выхода формирователя 6 импульсы подаются также на вход первого счетчика 3 импуль0 сов, осуществляющего их суммирование. На выходе счетчика 3 код представляет собой фактическое положение рабочего органа механизма и является сигналом обратной связи в контуре регулирования по5 ложения, В процессе отработки заданного перемещения разгон и. торможение электропривода осуществляются в соответствии с величиной сигнала Ь заданной скорости, отрабатываемого цифровым контуром регу0 лирования скорости, при этом количество импульсов частоты fg соответствует заданной величине перемещения. В случае превышения скоростью двигателя номинального значения блоком 11 осуществляется
5 снижение тока возбуждения с тем, чтобы обеспечить постоянство ЭДС во второй зоне регулирования.
В конце цикла отработки заданного перемещения при fз 0 контроль отработки
0 осуществляется цифровым контуром положения. При наличии ошибки в позиционировании (например, из-за инерционности контура регулирования скорости или из-за наличия статической нагрузки) на вход ин5 тегратора 7 через блок 5 поступают импульсы fn . Код на входе интегратора, а следовательно, и сигнал 11з на выходе цифроаналогового преобразователя 8 изменяется таким образом, чтобы устранить
ется таким образом, чтобы устранить рассогласование. При достижении величиной значения Ln рассогласование Д1 становится равным нулю и электропривод останавливается в заданном положении.
Реализацию оптимальной соответствующей минимуму тепловых потерь в электроприводе трапецеидальной тахограммы обеспечивает контур задания скорости, который работает следующим образом. В исходном состоянии второй и третий счетчики 16,17 находятся в нулевом состоянии/коды заданного перемещения и заданного времени перемещения Ln и tn равны нулю, сигнал на выходе преобразователя 19 частоты равен нулю, ключ 15 закрыт.Введенные в блок 1 задания перемещения и в блок 13 задания времени перемещения кода Ln и тн подаются в контур задания скорости, При этом блоком 20 вычисляется максимальное значение скорости в соответствии с выражением (10). С выхода блока 20 код VM подается на первые входы, коммутатора 24 кодов и цифрового компаратора 23, сравнивающего этот код с кодом номинального значения скорости VH, поступающего на второй вход компаратора с выхода задатчика 25 константы. В случае, если код VM превышает значение кода VH, на выходе компаратора 23 возникает сигнал, разрешающий прохождение кода VH через коммутатора 2.4 кодов на третий вход блока 21 вычисления ускорения. На первый и второй входы блока 21 подаются коды Ln и tn заданных величин перемещения и времени перемещения, При поступлении на вход блока 21 кода п и заданного перемещения на выходе компаратора 69 возникает единичный сигнал, в результате чего на выходе одновибратора 70 формируется импульс, устанавливающий счетчик 73 в нулевое состояние, а триггер 74 в единичное. В результате этого на выходе счетчика 74, который является и выходом блока 21, код величины ускорения а равен нулю, а на выходе сумматора 67 код равен величине последнего члена части уравнения (9). т.е. - 16LnVH . При этом на выходе компаратора 68 сигнал имеет нулевое, значение. Единичный сигнал, триггера 74 открывает ключ 72, через который на вход счетчика 73 с выхода генератора 7.1 начинают поступать импульсы. На выходе счетчика 73 код начнет возрастать,- в результате чего на выходах умножителей 43,45,50,55 будут формироваться коды, равные соответствен но первому, второму, третьему и четвертому членам левой части уравнения (9). Эти коды подаются с соответствующими знаками на входы сумматора 67 и в момент времени, когда их алгебраическая сумма будет равна
г
нулю, т.е. удовлетворяется уравнение (9),на выходе компаратора 68 возникает единичный сигнал, который установит триггер 74 в нулевое состояние. При этом ключ 72
закроется, а на выходе счетчика 73 будет зафиксирован код ускорения а, величина которого соответствует минимуму тепловых потерь в якорной цепи электропривода при двухзонном регулировании скорости.
В результате решения уравнения (9) на выходе блока 21 формируется код ускорения а, соответствующий минимуму тепловых потерь в электроприводе, Код а, а также коды Ln и tn подаются на входы блока 22,
который производит вычисление кода Lp ве- личмны пути разгона (торможения) в соответствии с выражением (4), Код Lp подается на третий вход блока 18 сравнения кодов, на второй вход которого подается код Цт текущего значения заданного перемещения с выхода третьего счетчика импульсов 17. При Lp LST на первом выходе блока 1 возникает сигнал, открывающий ключ 15, а на втором выходе - сигнал, соответствующий работе
второго счетчика 16 в режиме сложения импульсов. С выхода генератора 14 эталонной частоты импульсы с частотой f0 поступают на вход счетчика 16, выходной код которого начинает увеличиваться в соответствии с
выражением:
Nt fo t
(12)
Этот код, а также код а ускорения подаются на входы блока 26 умножения, на выходе которого формируется код произведения указанных величин в соответствии с выражением
40
Nf Kf -Nf -a
(13)
где Kf- коэффициент пропорциональности, зависящий от принятых дискретностей измерения времени и пути,
45С выхода блока 26 умножения код Nt подается на управляющий вход преобразователя 19 частоты, на частотный вход которого подаются с частотой f0 импульсы с выхода генератора 14 эталонной частоты.
50 На выходе преобразователя частотный сигнал изменяется в соответствии с выражением:
f3 f0Nf. 55 которое с учетом (12) и (13) имеет вид:
f3 fo2 Kf - at (14)
С выхода преобразователя 19 импульсы с частотой f3 поступают на третий счетчик 17.
работающий в режиме сложения. Выходной код этого счетчика изменяется в соответствии с выражением
J73dt -о
11 t2 2 Т
В момент времени, соответствующий окончанию разгона, когда величина кода L3r станет равной величине кода Lp, на первом выходе блока 18 сравнения кодов возникает сигнал, запрещающий прохождение импульсов через ключ 15 на вход счетчика 16. С этого момента код NI на выходе этого счетчика остается неизменным, в результате чего частота тз1 импульсов сигнала задания скорости также остается постоянной, что соответствует равномерному движению привода с максимальной скоростью.
В момент времени, соответствующий началу торможения, когда код LST на выходе счетчика 17 станет равным величине Ln - Lp, на первом выходе блока 18 сравнения кодов сноза появляется сигнал, открывающий ключ 15, а на втором выходе - сигнал, переключающий счетчик 16 на работу в режиме вычитания импульсов. При этом код Nt на выходе счетчика 16 и частота fa импульсов сигнала задания скорости на выходе, преобразователя 19 частоты начинают уменьшаться. В момент времени, соответствующий окончанию торможения, когда код 13т станет равным коду заданного перемещения Ln, на первом выходе блока 18 сравнения кодов возникает сигнал закрывающий ключ 15. На этом цикл работы контура задания скорости заканчивается. При отработке перемещения с максимальной скоростью, не превышающей номинальную скорость привода, работа контура задания скорости отличается от описанной лишь тем, что на выходе цифрового компаратора 23 формируется сигнал, по которому с выхода блока 20 на третий вход блока 21 проходит через коммутатор 24 код максимальной скорости, вычисленный в соответствии с выражением (Ю).
На фиг.2 показаны тахограммы: 27,28 - при отработке перемещений с максимальной скоростью VM VH и VM2VH: 29 при отработке перемещений с максимальной скоростью VM VH с ослаблением магнитного поля; 30 - при отработке такого же перемещения как и для тахограммы 29, но без ослабления магнитного поля (для сравнения).
Таким образом, в течение отработки заданного перемещения за заданное время контур задания скорости формирует частотный сигнал.задания скорости по оптималь ному трапецеидальному графику, обеспечивающему минимум тепловых потерь в якорной цепи электропривода с двухзон 5 ным регулированием скорости.
Введенные в систему дополнительные блоки 20,21,22,26 представляют собой, например, устройства, выполняющие арифметические операции по заданной программе.
10 Цифровой компаратор 23 представляет собой известную логическую схему, выполненную на мажоритарных элементах. Коммутатор 24 кодов представляет собой набор управляемых ключей, а задатчик 25
15 константы - набор тумблеров или переключателей.
Формула изобретения Система позиционирования с двухзон- ным регулированием скорости электропри0 водз, содержащая блок задания времени перемещения, блок задания перемещения, выход которого соединен с первым входом сумматора, выход которого подключен к входу преобразователя код-частота, выхо5 дом соединенного с входом блока ограничения частоты, выход которого соединен с первым входом интегратора, цифроаналого- вый преобразователь, входом подключенный к выходу интегратора, а выходом - к
0 первому входу блока регулирования напряжения якоря двигателя, а также двигатель, выход которого соединен с вторым входом блока регулирования напряжения якоря двигателя и с входом блока регулирования
5 тока возбуждения двигателя, выход которого соединен с вторым входом двигателя, кроме того, датчик перемещения и формирователь импульсов, выход которого соеди- - нен с вторым входом интегратора, первый
0 счетчик импульсов, выход которого соединен с вторым входом сумматора, а также второй и третий счетчики импульсов, блок сравнения кодов, преобразователь частоты и генератор эталонной частоты, выход кото5 рого соединен с информационным входом ключа, управляющий вход которого соединен с первым выходом блока сравнения кодов, второй выход которого соединен с управляющим режимом входом второго
0 счетчика импульсов, первый вход блока сравнения кодов подключен к выходу блока задания перемещения, а второй вход - к выходу третьего счетчика импульсов, счетный вход которого соединен с вторым вхо5 дом блока ограничения частоты и с выходом преобразователя частоты, отличающая- с я тем, что, с целью повышения экономичности при расширении области применения, в нее дополнительно введены цифровой компаратор, коммутатор кодов,
зэдатчик константы, блок умножения, а также блоки вычисления ускорения, скорости и пути, первые входы которых соединены с выходом блока задания перемещения, а вторые входы - с выходом блока задания времени перемещения, выход блока вычисления скорости соединен с информационными входами цифрового компаратора и коммутатора кодов, второй вход которого соединен с выходом задатчика константы и с задающим входом цифрового ком,парато- ра, выход которого соединен с управляющим входом коммутатора кодов, выход
которого соединен с третьим входом блока вычисления ускорения, выход которого соединен с третьим входом блока вычисления пути и с первым входом блока умножения, второй вход которого соединен с выходом второго счетчика импульсов, а выход - с управляющим входом преобразователя частоты, информационный вход которого соединен с выходом генератора эталонной частоты, счетный вход второго счетчика импульсов соединен с выходом ключа, а выход блока вычисления пути соединен с третьим входом блока сравнения кодов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Устройство управления электроприводом летучих ножниц | 1990 |
|
SU1750868A1 |
| Способ управления электроприводом летучих ножниц | 1986 |
|
SU1382603A1 |
| СПОСОБ ПРОГРАММНОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ЭЛЕКТРИЧЕСКИМ ДРОБЛЕНИЕМ ШАГА | 1990 |
|
RU2020725C1 |
Изобретение относится к технике автоматического управления и регулирования, а именно к системам позиционирования. Цель изобретения - повышение экономичности при расширении области применения. Система позиционирования обеспечивает отработку заданного перемещения рабочего органа механизма в течение заданного времени. При этом скорость электропривода изменяется по симметричному трапецеидальному графику путем двухзон- ного управления двигателем постоянного тока. В первой зоне регулирование скорости осуществляется за счет изменения напряжения, подводимого к якорю двигателя, во второй зоне - за счет изменения магнитного потока двигателя. Отработка перемещений осуществляется с минимизацией суммарных (в обеих зонах) тепловых потерь в якорной цепи двигателя. Это достигается за счет дополнительного, в сравнении с прототипом, введения в систему блоков вычисления ускорения, скорости и пути, а также цифрового компа- patdpa, коммутатора кодов, задатчика константы и блока умножения, с помощью которых вычисляется оптимальное Значение ускорения при разгоне (торможении) и формирование требуемого графика скорости электропривода. 5 ил.
Фиг.1.
ФигМ
| Авторское свидетельство СССР N | |||
| Цифровая система автоматического регулирования | 1973 |
|
SU447684A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
