Изобретение относится к электротехнике, в частности к моментным электродвигателям с неограниченным углом поворота ротора, которые находят широкое применение в прецизионных следящих системах.
Целью изобретения является повышение
КПД и стабильности электромагнитного момента.
На чертеже представлена блок-схема моментного электродвигателя.
Двигатель содержит статор с двухфазной синусной обмоткой 1, ротор-индуктор 2, синусно-косинусный вращающийся трансформатор 3, модулятор 4, фазочувствительные выпрямители 5, блоки 6 перемножения, диодный функциональный преобразователь 7, блок 8 сложения, блок 9 вычитания, усилители 10 тока, датчики 11 тока.
Ротор 2 механически соединен с ротором синусно-косинусного вращающегося трансформатора 3, его вход соединен с выходом модулятора 4, а выходы соединены с входами фазочувствительных выпрямителей 5. Их выходы соединены с входами блоков 6 перемножения, входом блока 8 сложения и входом блока 9 вычитания. Выход функционального преобразователя 7 соединен с вторыми входами блоков 6 перемножения, их выходы соединены перекрестными связями с вторыми входами блока 8 сложения и блока 9 вычитания. Выходы этих блоков соединены с входами усилителей 10 тока, их вторые входы соединены с выходами датчиков 11 тока. Фазы 1 обмотки статора соединены с входами датчиков 11 тока и с выходами усилителей .10 тока.
Двигатель работает следующим образом.
Сигнал управления т в аналоговой форме подается на входы модулятора 4 и функционального преобразователя 7. Модулятор преобразует управляющий сигнал в переменное напряжение, питающее обмотку возбуждения синусно-косинусного вращающегося трансформатора 3. Напряжения на его выходных обмотках изменяются по законам Us -KimSina- sinwt, Uc KlmCOsasina)t, (l) где (О - угловая частота модуляции.
Эти напряжения выпрямляются с учетом фазы и сглаживания фазочувствительными выпрямителями 5, на выходе которых получаются сигналы -ImSina и .
Функциональный преобразователь 7 вырабатывает угол коррекции и функции от
управляющего сигнала т в виде амплитуды напряжения
(Л-яггч1п(II: II5/оА
5-%o+V §+8(L.-L,))
где 1J50 - максимальное потокосцепление одной фазы с потоком индуктора; Ld и LJ- индуктивности фаз-обмотки стато10ра соответственно по продольной и
по поперечной осям.
Сигналы с выходов фазочувствительных выпрямителей 5 и функционального преобразователя 7 поступают на входы блоков 6 перемножения, блока 8 сложения и блока 9 5 вычитания. На выходах блоков 8 и 9 получаются желаемые значения токов фаз i°A и i°B согласно формулам
.Imsina-|-e/mcosa;V-3/
i& ImCosa-f-0ImSina.W
2Q Эти сигналы поступают на входы усили телей 10 тока, где они сравн.иваются с действительными значениями токов, поступающих от датчиков 11 тока. Усилители 10 обеспечивают выполнение равенств
iA.i ,
25 Выражения (2), (3) и (4) получаются из условия максимума электромагнитного момента, определяемого выражением (г|;о1тС05в + - -з-1Ь1п2в)(5)
при токах фаз
(a-в), ,cos(a-в), (6) 30 где р - число пар полюсов.
Дифференцируя выражение (5) и приравнивая производную нулю, получаем формулу (2). Угол 0 не превышает 20-30°, поэтому формулы (6) с учетом равенств
cos0; l
35 можно привести к виду (3) и (4). Из равенства (6) следует
(U°f-f(i/)2 I COnst,
Т. е. введение корректирующего угла 6 обеспечивает максимальное значение элект4Q ромагнитного момента при фиксированной мощности потерь в обмотке двигателя. Функция (2) нечетная. При малых значениях 1т справедливо равенство
0(Ld-L,)U, что упрощает реализацию функционального
45 преобразователя. Работа в зоне максимума электромагнитного момента делает двигатель нечувствительным к небольшим погрешностям в определении углов а и 0.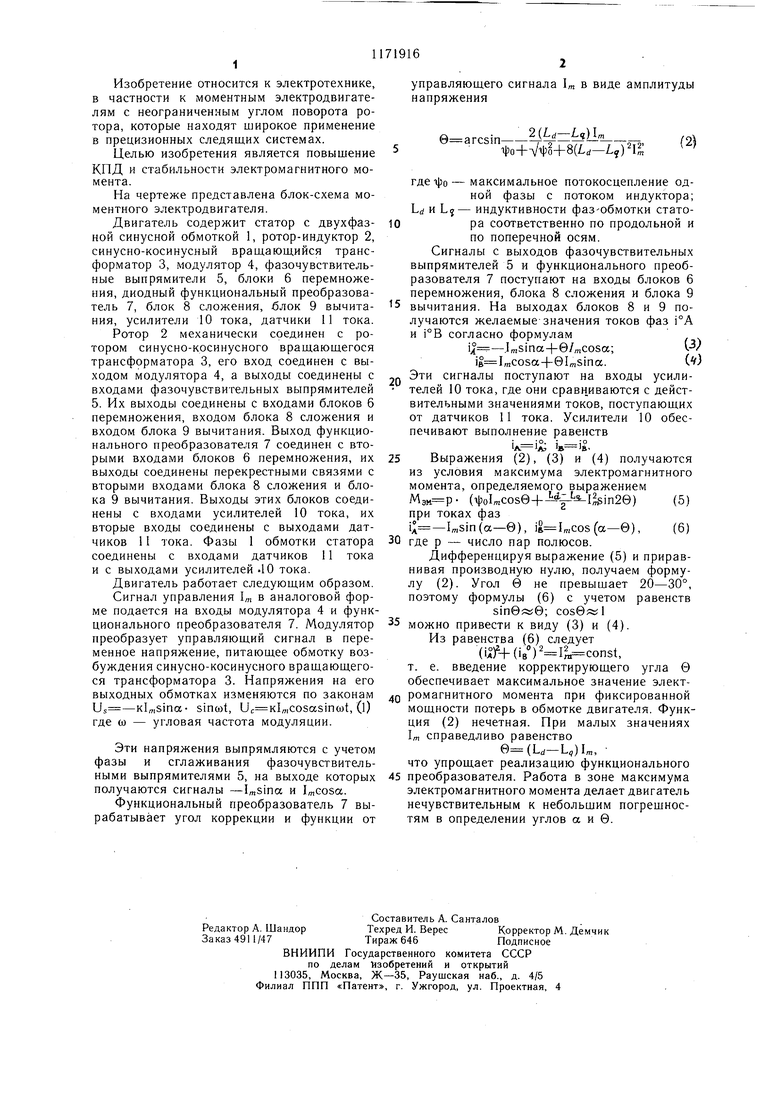
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1345292A1 |
| Моментный вентильный электродвигатель | 1983 |
|
SU1170565A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1494156A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Устройство для контроля подшипников | 1987 |
|
SU1430786A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1275677A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
МОМЕНТНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий синхронную электрическую машину с двухфазной синусной обмоткой на статоре и с явно полюсным ротором-индуктором, модулятор, синусно-косинусный вращающийся трансформатор, ротор которого механически соединен с ротором-индуктором,а вход соединен с выходом модулятора, и схему питания, содержащую два фазочувствительных выпрямителя, входы которых соединены с выходами синусно-косинусного вращающегося трансформатора, два усилителя тока и два датчика тока, их выходы соединены с входами усилителей тока, выходы которых соединены с фазами обмотки статора и с входами датчиков тока, отличающийся тем, что. Im с целью повышения КПД и стабильности электромагнитного момента, в него введены блоки сложения и вычитания, два блока перемножения и функциональный преобразователь, выход которого соединен с входами блоков перемножения, выходы фазочувствительных выпрямителей соединены с входами блоков сложения, вычитания и с вторыми входа.ми блоков перемножения, выходы которых соединены перекрестными связями с вторыми входами блоков сложения и вычитания, выходы которых соединены с вторыми входами усилителей тока, а функциональный преобразователь реализует функцию 0 arcsinЦ -Ы . г1 о+л/х|)ГН
| Столов Л | |||
| И | |||
| и др | |||
| Авиационные моментные двигатели | |||
| - М.: Машиностроение, 1979, с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| 0 |
|
SU186019A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
