чагом 7 - на другом н копир IО с пазом (п) 9. П 9 выпо.тпген н форме па- раллелог рамма с продленными за пределы фигуры сторонами, параллельными продольной оси корпуса . Л ш повышения надежности в работе в местах разветвления установлены подпружиненные заслонки 11. Конец рычага 7 перемещается Б П 9 копира 10 и при движении по его винтовому участку пово- 1рачивает щток 6 с кулачком 5, котоИзобретение относится к приспособлениям для демонтажа полых деталей, запрессосанных по наружно -1у диаметру, и может б ыть испо льзовано при разбо- рочно-сборочных работах, в частности в ремонттю:- производстве.
Цель изобретения - расширение технологических возможностер устройства за счет обеспечения возможности вы- прессовки втулок одного диаметра.
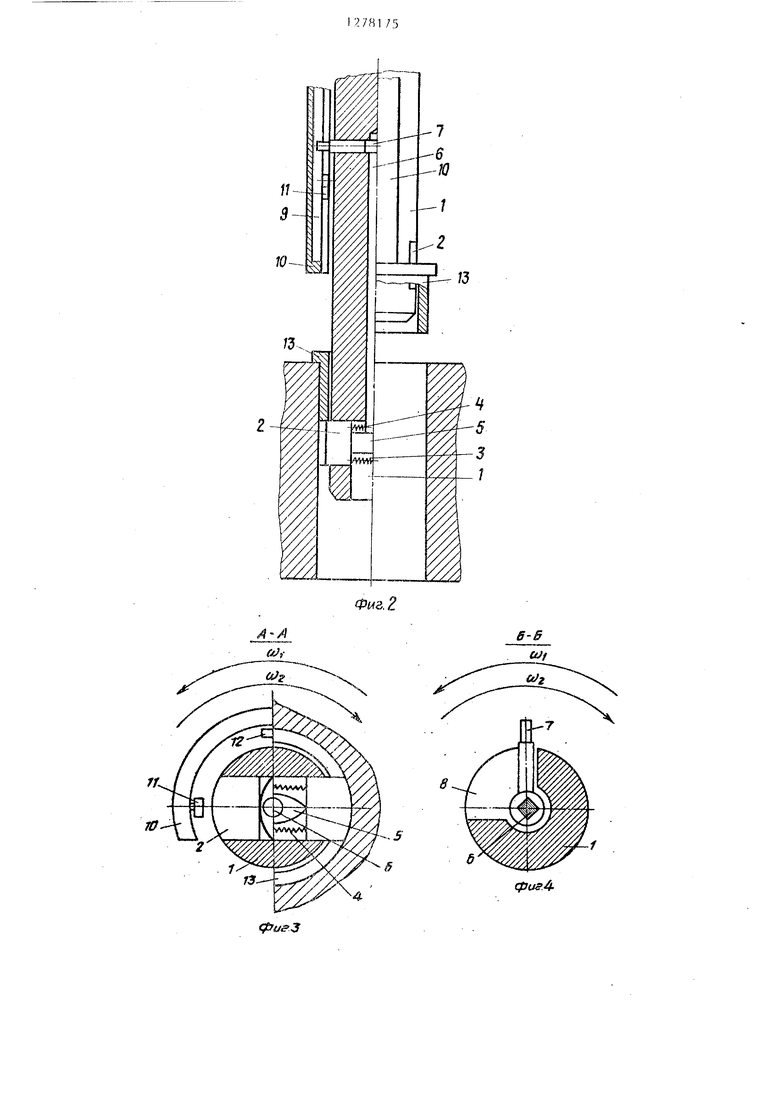
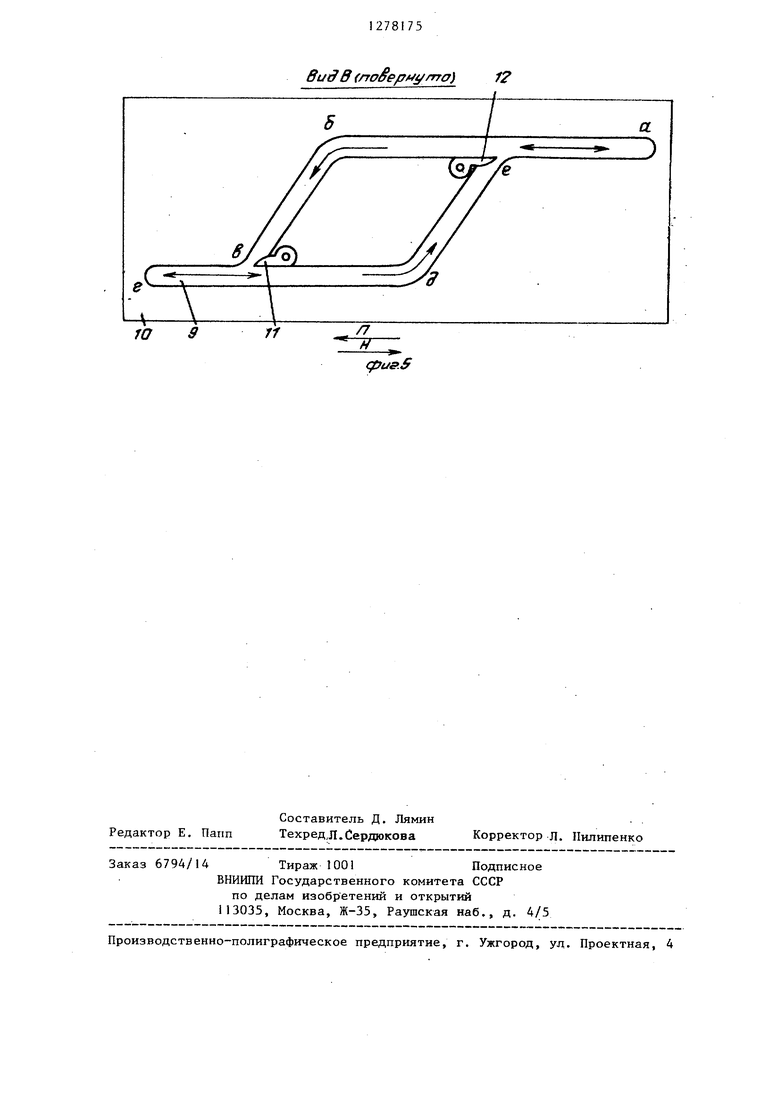
На фиг. 1 изображено устройство перед работой (слева) и момент начала выпрессовки первой втулки (справа), продольный разрез; на фиг , 2 - то же, начало выпрессовки второй втулки (слева), сброс второй втулки (справа); па фиг. 3 - разрез А-А на фиг. 1; па фиг. 4 - разрез Б-Б на 1ФИГ. 1; на фиг. 5 - вид В на фиг, 1 (развертка копира).
YcTpoiicTBo содержит приводной корпус 1 с радиальными отверстиями, в которых подвижпо установлены захватные 2, выполненные в виде параллелепипедов с боковой цилин- дри11еской поверхностью, соединснпьк мёлсду собой пружинами 3 и 4, пршки- магащими захватные элементы к кчшач- ку 5, имеющему в плане форму овала, закрепленному перпендикулярпо оси корпуса на штоке 6, установленном в корпусе с возможностью углового пе- ремеш,ения. На другом конце штока смонтирован рычаг 7, раз мещенный в радиальной прорези 8 корпуса, выполненной перпендикулярно оси кор- пуса.
рый взаимодействует с захватными элементами 2, При перемещении корпуса 1 в направлении разбираемого узла рычаг 7 идет по одцим участкам П 9, что позволяет устройству пройти В 13, а затем выпрессовывать В 14, а при обратном ходе корпуса работают .. другие участки и выпрессовывается В 14. Изменяя форму копира, можно подбирать необходимый режим работы захватных элементов. 2 з.п. ф-лы, 5 ил.
3
Свободный конец рычага 7 размещен в пазу 9 копира 10, имеющем форму параллелограмма, расположенные параллельно продольной оси штока сто- роны которого вьтолнены с прямолинейными участками, размещенными за пределами параллелограмма, В прО7 тивополоншых углах параллелограмма, сопряженных с прямолинейными участка- Mil, смонтированы подпружиненные з-ас- лонки II и 2.
Устройство работает следующим образом.
При перемещении корпуса 1 в направлении стрелок П и Н рьиаг 7 свободным концом перемещается по пазу 9 копира 10. Проходя участки паза S f) и д-е (фиг. 5), рычаг 7 переме 1 ается .по прорези 8 корпуса , вращая вокруг оси шток 6 и закреплен- ньш на-нем кулачок 5, который перемещает захватные элементы 2 в радиальном направлении, В исходног пояохсении корпуса 1 свободньш конец рычага 7 находится в точке А паза 9 копира 10. В этом положении захват- кые элементы 2 под действием пружин 3 и 4 прижаты к кулачку 5 по минимальному его размеру. При начале движения корпуса 1 в направлении стрелки П свободны конец рычага перемещается по прямолинейному участку a-S паза 9 копира 10, при этом захватные элементы остаются неподвижными. После того, как захватные элементы 2 корпуса 1 пройдут вьтрес- совываемую втулку 13, рычаг 7 про- .ходит точку S паза 9 и начинает дви
жение по винтовому участкуfi-6 . При этом он выполняет круговое движение вокруг оси корпуса I, вращая шток 6 с кулачком 5 в направлении стрелки ц) . При этом происходит разведение захватных элементов 2, Пройдя заслоку 1 1 , свободный конец рычага 7 при дальнейшем движении корпуса 1 в направлении стрелки П движется по прямолинейному участку 6-г паза 9 копира 10. При этом захватные элементы 2 остаются разведенными и таким образом происходит выпрессовка втулки 14. После выпрессовки втулки 14 корпус 1 перемещается в направлении стрелки Н. Заслонка 11 обеспечивает движение свободного конца рычага 7 по прямолинейному участку i-g , сохраняя положение захватных элементов 2 до конца выпрессовки втулки 13, после чего свободньм конец рычага 7 переходит на участок паза 9 копира 10 и вращает щток 6 с кулачком 5 в направлении стрелг ки cJg (фиг. 3 и 4). При этом захватные элементы 2 под действием пружин 3 и 4 перемещаются к оси корпуса I. Пройдя заслонку 12, свободный конец рычага 7 движется по прямолинейному участку е-а , захватные элементы 2 остаются в сведенном состоянии. При работе устройства в вертикальном положении сброс :втулки 13 происходит после сведения захватных элементов 2. При работе устройства в горизонтальном положении сброс втулки 13 происходит в результате ее упора в торец копира 10 при дальнейшем движении корпуса 1 в йаправлении стрелки Н до момента, пока рычаг 7 не дойдет до точки о паза 9 (устройство занимает исходное положение).
Предлагаемая конструкция устройства позволяет за один полный ход штока выпрессовывать две втулки одиto
t5
20
5 25
0
5
0
5
какового диаметра. Изменяя форму копира, можно получить необходимьй режим работы кулачков, что позволяет использовать устройство в раэпичнык автоматизированных линиях.
Формула изобретения
1. Устройство для выпрессовки втулок, содержащее приводной корпус с радиальными отверстиями, в которых установлены подпружиненные в направлении, перпендикулярном продольной оси корпуса, захватные элементы, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено механизмом управления захватными элементами, вьтолненным в виде смонтированного в корпусе с возможностью углового перемещения штока с кулачком, имеюпщм в плане ,ов апьную форму, на одном конце, установленным е возможностью взаимодействия с захватными элементами, и рычагом - на другом, а также копира с пазом, имеющим форму параллелограмма, расположенные параллельно продольной оси штока стороны которого выполнены с прямолинейными участками, размещенными за пределами параллелограмма, при этом в корпусе выполнена радиальная прорезь, а рычаг размещен, в последней и установлен своим концом в пазу копира.
2.Устройство по П.1, отличающееся тем, что,оно снабжено подпружиненными заслонками, установленными в противоположных углах параллелограмма, сопряженных с прямолинейными участками.
3.Устройство по п.I, о т л и ч-а- :ю щ е е с я тем, что каждый захватный элемент выполнен в виде параллелепипеда с цилиндрической наружной - поверхностью.
Фмг,2
B-S
фчг4фаё-З
{ло е/yi t/fTra} 12
ГО 9
Редактор E. Папп
Составитель Д. Лямин Техред.Л. Сердюкова
Заказ 6794/14 Тираж 1001Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, уд. Проектная, 4
(pUff.S
Корректор л. Пилипенко
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выпрессовки деталей типа втулок | 1986 |
|
SU1431909A1 |
| Захват к съемнику для выпрессовкиВТулОК | 1978 |
|
SU795931A1 |
| Устройство для выпрессовки втулок из корпусных деталей | 1980 |
|
SU903069A1 |
| Устройство для выпрессовки деталей типа втулок | 1984 |
|
SU1171268A1 |
| Устройство для выпрессовки втулок из корпусных деталей | 1982 |
|
SU1117178A1 |
| Устройство для выпрессовки деталей типа втулок | 1990 |
|
SU1764925A1 |
| Устройство В.В.Дундича для демонтажа деталей типа втулок | 1989 |
|
SU1685668A1 |
| Устройство для выпрессовки цилиндрических деталей | 1989 |
|
SU1798155A1 |
| Устройство для замены изношенных втулок распределительного вала блока двигателя внутреннего сгорания | 1983 |
|
SU1150057A1 |
| Устройство для выпрессовки деталей типа вал-втулка | 1979 |
|
SU776844A1 |
Изобретение относится к сборочному производству, в частности к устройствам для выпрессовки втулок. Изобретение позволяет расширить технологические возможности устройства для выпрессовки втулок (в) путем применения механизма управления подпружиненными захватными элементами. Ттот механизм управления представляет собой шток 6 с закрепленными на нем кулачком 5 на одном конце и ры5Г « (Л N5 -J 00 ч СП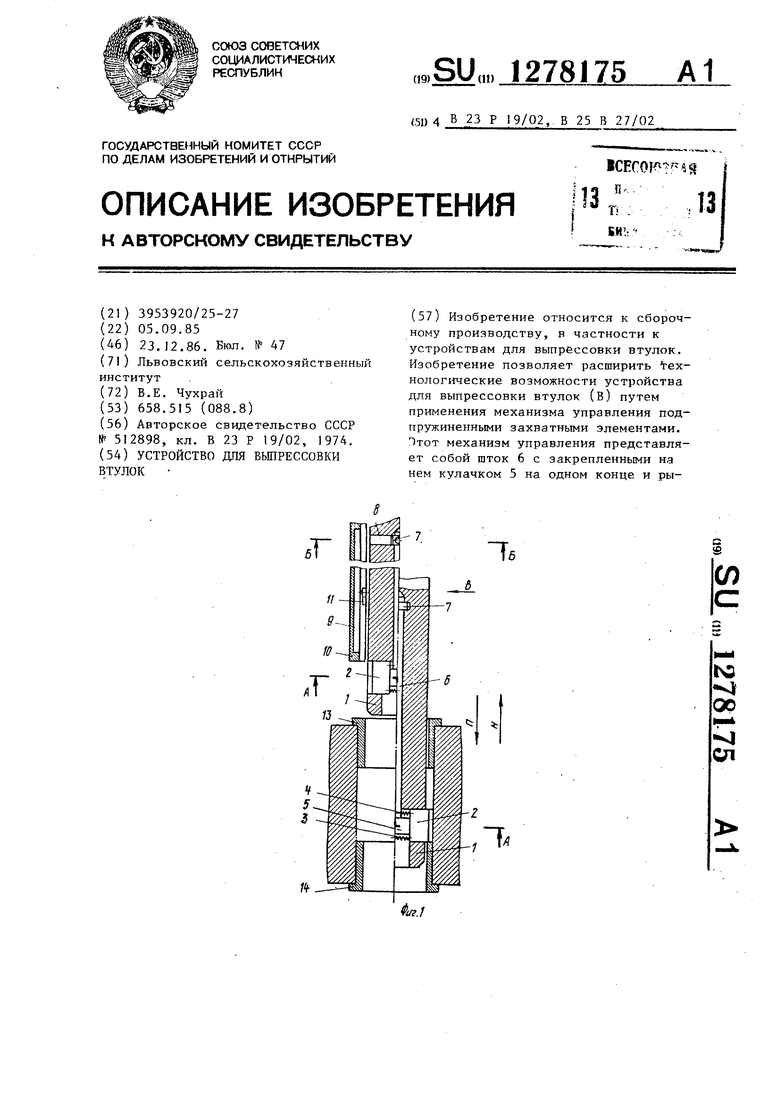
| Устройство для разборки прессовых соединений | 1974 |
|
SU512898A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
