ним концом приводная упругодеформи- руемая рука 3, выполненная в виде двух соединенных между собой металлических листов А с образованием мезвду ними канала 5, имеющего в развертке криволинейную форму. На свободном конце упругодеформируемой руки 3 име
1
Изобретение относится к машиностроению и может быть использовано при автоматизации технологических операций в вакууме.
Цель изобретения - расширение функциональных возможностей за счет обеспечения возможности выбора различной траектории перемещения захватного органа.
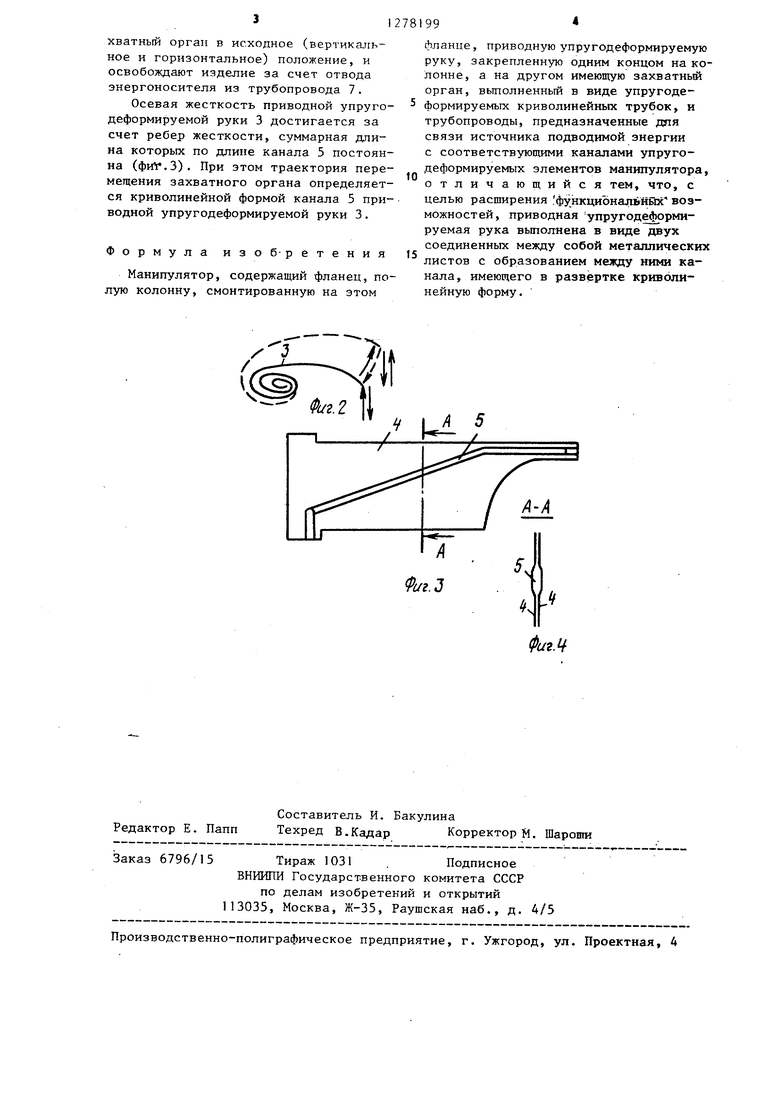
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - схема рабочей зоны манипулятора; на фиг.З - привод- ная упругодеформируемая рука; на фиг ФИГ.4 - разрез А-А на фиг.З.
Манипулятор состоит из фланца 1, прикрепленного к герметичной стенке, разделяющей среду, fe которой работает манипулятор, и среду, где находится источник подводимой энергии (не показано).
В центре фланца 1 жестко смонтирована полая колонна 2, на которой одним концо: закреплена приводная упругофеформируемая рука 3, выполненая в виде двух соединенных между собой металлических листов 4 с образованием между ними канала 5, имеющего, развертке криволинейную форму, при этбм в свернутом виде образуется, наример, канал по спирали Архимеда или по дуге окружности.
В полости колонны 2 расположены трубопроводы 6-8, предназначенные для соединения источника подводимой энергии с соответствующими каналами. Трубопровод 8 герметично соединен с каналом 5 приводной упругодеформируемой руки 3. трубопроводы 6 и 7 герметично соединены соответственно с компенсаторными трубками 9 и 10. На свободном, конце приводной упругодеформиется захватный орган, выполненный из упругодеформируемых криволинейных трубок 14. Полости упругодеформируе- мых элементов манипулятора соединены трубопроводами с источником подводимой энергии. 4 ил.
0
5
0
руемой руки 3 закреплен тройник 1, герметично связанный с симметрично расположенными относительно него- упругодеформируемыми криволинейными трубками 12 с одной стороны и с компенсационной трубкой 9 - с другой.
Свободные концы упругодеформируе- мых криволинейных трубок 12 жестко соединены с коллектором 13, который с одной стороны герметично соединен с компенсационной трубкой 10, ас другой стороны - с захватным органом, выполненным в виде упругодеф ормируе- мых криволинейных трубок 14.
Манипулятор работает следующим образом.
По трубопроводу 8 подводится энергоноситель от источника (не показан) в канал 5 приводной упругодеформируемой руки 3, перемеп;ая захватньш орган в горизонтальной плоскости в заданное положение.
Через трубопровод 6 и компенсат-ор- ную трубку 9 обеспечивается свобод- 5 ное перемещение захватного органа в горизонтальной плоскости, кроме того, энергоноситель поступает в тройник 11 и симметрично расположенные относительно него упругодеформируемые криволинейные трубки 12, свободные концы которых жестко соединены с коллектором 13, и вызывает вертикальное перемещение захватного органа.
В тот момент, когда захватный орган достигает заданного положения, по трубопроводу 7, компенсаторной трубке 10 и коллектору 13 энергоноситель поступает в упругодеформируемые криволинейные трубки 14 захватного органа и зажимает изделие.
После этого энергоноситель отводят из трубопроводов 6 и 8, возвращая за0
5
хватный орган в исходное (вертикальное и горизонтальное) положение, и освобозкдают изделие за счет отвода энергоносителя из трубопровода 7.
Осевая жесткость приводной упруго- деформируемой руки 3 достигается за счет ребер жесткости, суммарная длина которых по длине канала 5 постоянна (фиУ.З), При этом траектория перемещения захватного органа определяется криволинейной формой канала 5 приводной упругодеформируемой руки 3,
Формула изоб-ретения
Манипулятор, содержащий фланец, полую колонну, смонтированную на этом
фланце, приводную упругодеформируемую руку, закрепленную одним концом на колонне, а на другом имеющую захватный орган, вьтолненный в виде упругоде- 5 формируемых криволинейных трубок, и трубопроводы, предназначенные для связи источника подводимой энергии с соответствующими каналами упруго- деформируемых элементов манипулятора, отличающийся тем, что, с целью расширения . функциональных возможностей, приводная упругодефррми- руемая рука вьтолнена в виде двух соединенных между собой металлических листов с образованием между ними канала, имеющего в развертке криволинейную форму.
10
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1313686A1 |
| ВАКУУМНЫЙ ЗАТВОР | 1996 |
|
RU2114354C1 |
| Автооператор | 1985 |
|
SU1296402A1 |
| Кисть манипулятора со стыковочным устройством | 1982 |
|
SU1304742A3 |
| Натекатель | 1988 |
|
SU1566155A1 |
| УСТАНОВКА ИМИТАЦИИ ДОЖДЯ | 2024 |
|
RU2838377C1 |
| Сверхвысоковакуумный затвор | 1981 |
|
SU983370A1 |
| Прямоточный стерилизуемый побудитель расхода культуральной жидкости | 1989 |
|
SU1687601A1 |
| Захватное устройство | 1982 |
|
SU1007973A1 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ И ПРИВОД ВРАЩЕНИЯ ДЛЯ НЕГО | 2001 |
|
RU2206913C2 |
Изобретение относится к области машиностроения и может быть использовано при автоматизации технологических операций в вакууме. Целью изобретения является расширение функциональных возможностей за счет обеспечения во.зможности выбора различной траектории перемещения захватного органа. На фланце 1 смонтирована полая колонна 2, на которой закреплена од(Л
V
/ ЦА
Редактор Е. Папп
Составитель И. Бакулина
Техред В.Кадар Корректор М. Шароти
Заказ 6796/15 Тираж 1031 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1981, с.379. |
