Изобретение относится к машиностроению, а именно к неперепрограмми руемым автоматическим манипуляторам, и может быть использовано для автоматизации операций загрузки-выгрузки технологического оборудования.
Цель изобретения - упрощение конструкции за счет сокращения числа приводов для обеспечения Г-образной траектории перемещения захватного ор гана (типовой траектории для загрузочных операций).
На фиг.1 изображена кинематическа схема автооператора на фиг.2 - то же, первьлй вариант выполнения ; на фиг.З - то же, второй вариант выполнения .
Автооператор (фиг.1 и 2) состоит из поворотного основания - звена 1, двух поворотных рычагов 2 и 3, ша- туна 4, механической руки 5 с захватным органом 6 и дополнительного звена 7. Элементы 1-5 и 7 связаны между собой шарнирно. Поворотный рычаг 2 кинематически связан с приводом. Дополнительное звено 7 одним концом связано с механической 5, а другим - с неприводньм (фиг.1) или приводным (фиг.2) рычагом. В автооператоре, показанном на фиг.З, помимо основного многозвенника и механической руки 5 имеются симметрично расположенные относительно оси вращения поворотной стойки 1 дополнительные многозвенник со звеньями 8, 9, 10 и механическая рука 11 с захватным органом 12, причем звенья 1 и 8 кинематически связаны между собой зубчатыми колесами 13 и 14, а механически руки 5 и 11 - поступательный парой 15. На фиг.1 также показаны обслуживаемое оборудование 16, транспортируемое изделие 17, транспортер 18 и характерные точки 19-24 траектории перемещения захватного осгана 6.
Автооператор работает следующим образом.
В исходном положении (фиг.1) захватный орган находится в точке 19. 0 После окончания операции на оборудовании 16 включается привод и начинает вращаться рычаг 2. При этом захватный
5
0 5
5
0
0
5
0
орган из точки 19 перемещается последовательно в точки 20 и 21, далее захватывается изделие 17, поднимается в точку 21 и отводится от обору-, дования в точку 19. Затем осуществляется вращение поворотной стойки 1, в результате чего изделие перемещается в точку 22. При дальнейшем вращении рычага 2 изделие перемещается через точки 23 и 24 траектории перемещения захватного органа и укладьшается на транспортер. Захватный орган 6 освобождает изделие и возвращается по обратной траектории в исходное положение .
Формула изобретения
1.Автооператор, содержащий поворотную стойку, основной шарнирно-ры- чажньй многозвенник, два рычага которого шарнирно связаны со стойкой, а один жестко связан с основной механической рукой, которая шарнирно связана посредством шатуна с указанными двумя рычагами, и привод, отличающийся тем, что, с ЦЕЛЬ упрощения конструкции за счет сокращения числа приводов для обеспечения Г-образной траектории перемещения захватного органа, один из двух указанных рычагов многозвенника кинема- тически связан с приводом с возможностью вращения относительно стойки,
а сам многозвенник снабжен дрполни- тельным звеном, шарнирно связанным одним концом с механической рукой, а другим - с приводным или с непри- водньм рычагом.
2.Автооп€ ратор по п.1, отличаю, щ и и с я тем, что, с целью повышения производительности, он снабжен дополнительными механической рукой и шарнирно-рычажным многозвен- ником, расположенными симметрично основным механической руке и шарнир- но - рычажному многозвеннику относительно оси вращения поворотной стойки, причем приводные звенья обоих многозвенников кинематически связаны между собой, а механические руки связаны между собой поступательной парой.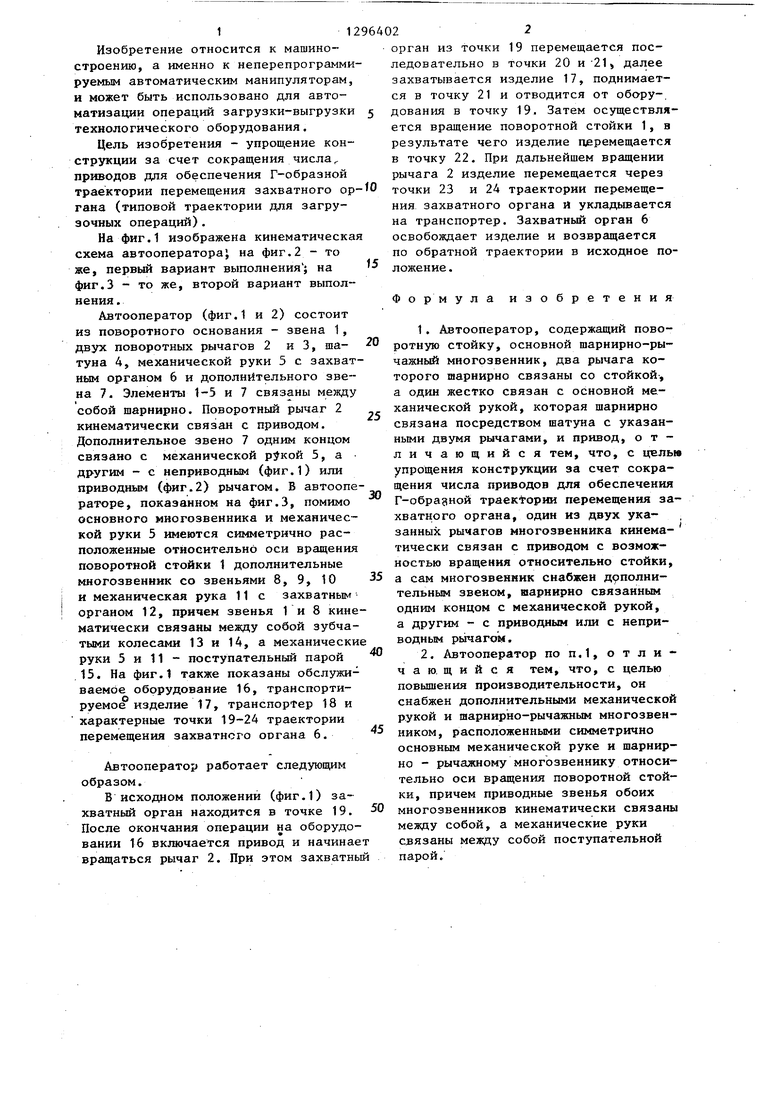
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ГИБРИДНОЙ КИНЕМАТИКОЙ | 2013 |
|
RU2572112C2 |
| Автооператор для подачи плоских заготовок в обрабатывающую машину | 1988 |
|
SU1539082A1 |
| Захват | 1972 |
|
SU440249A1 |
| АВТООПЕРАТОР | 1972 |
|
SU331878A1 |
| Манипулятор | 1986 |
|
SU1454687A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| Захватное устройство для цилиндрических длинномерных изделий | 1986 |
|
SU1440842A1 |
| Манипулятор | 1984 |
|
SU1263522A1 |
Изобретение относится к машиностроению, а именно к неперепрограмми- руемым автоматическим манипуляторам, и может быть использовано для автоматизации загрузки-выгрузки технологического оборудования. Цель изобретения - упрощение конструкции за счет сокращения числа приводов для обеспечения Г-образной траектории перемещения захватного органа - типовой траектории для загрузочных операций. Автооператор состоит из поворотного основания 1, двух поворотных рычагов 2 и 3, щатуна 4, механической руки 5 с захватным органом 6 и дополнительного звена 7. Элементы 1-5 и 7 связаны между собой шарнирно. Поворотный рычаг 2 кинематически связан с приводом. Его вращение обеспечивает перемещение захватного органа 6 по траектории с характерными точками 19-21 и после поворота стойки по траектории с характерными точками 22-24. 1 з.п. ф-лы, 3 ил. о S (Л п 1лу // фигЛ
Редактор Е.Копча
Составитель Ю.Вильчинский Техред Л.Олейник
Заказ 708/20Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор Л.Пилипенко
| Промышленный робот | 1977 |
|
SU1083900A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
