Изобретение относится к машиностроению, преимущественно к промышленным роботам и манипуляторам, предназначенным для захвата и транспортировки деталей типа рессор, амортизаторов, т. е. жестких пружин.
Известно захватное устройство для деталей типа пружин, содержаш,ее корпус, рычажный схват, клиновой механизм разведения губок схвата и фиксируюш.ие упоРы 1.
Недостатком данного устройства является то, что он может захватывать пружины только за отверстие, что сужает его технологические возможности.
Цель изобретения - расширение технологических возможностей и повышение надежности при захвате пружины за витки.
Указанная цель достигается тем, что захватное устройство, содержащее клиновой механизм и фиксирующие упоры, снабжено расположенными в корпусе П-образной рамой и дополнительным рычажным схватом, причем в раме выполнены криволинейные пазы, а фиксирующие упоры расположены в этих пазах с возможностью регулировочного перемещения при этом клиновой механизм связан с П-образной рамой посредством дополнительно введенных направляющих штанг и имеет клиновые элементы, число которых соответствует числу схватов.
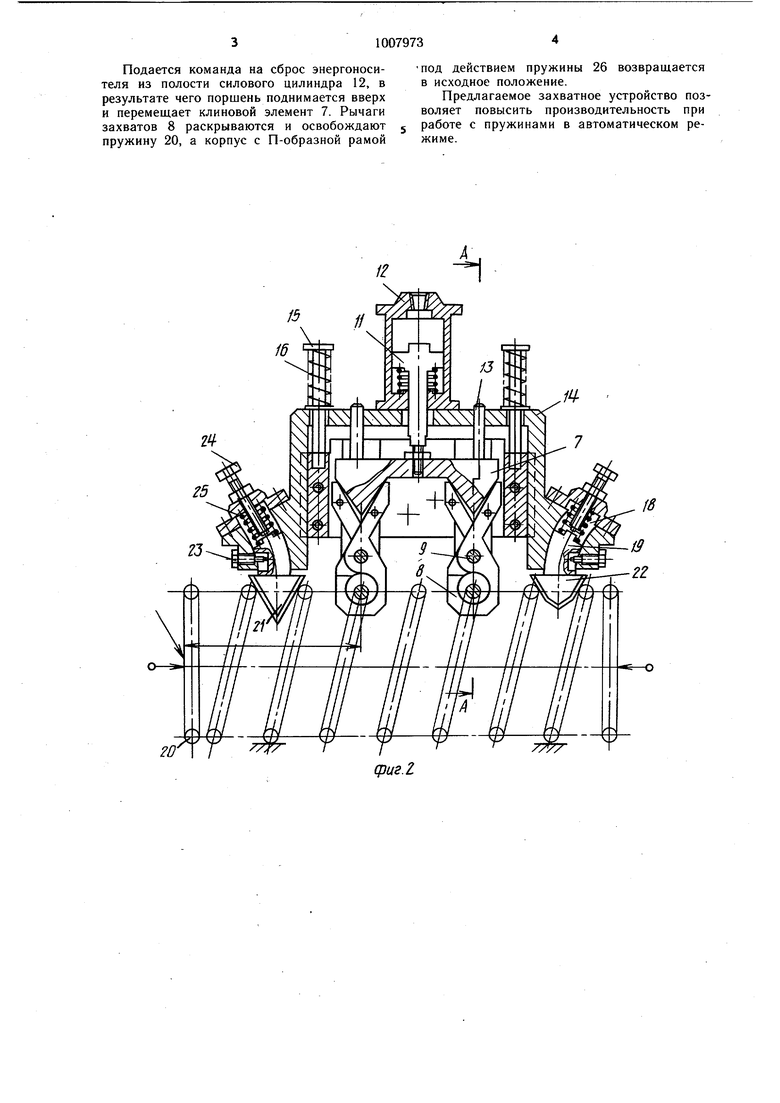
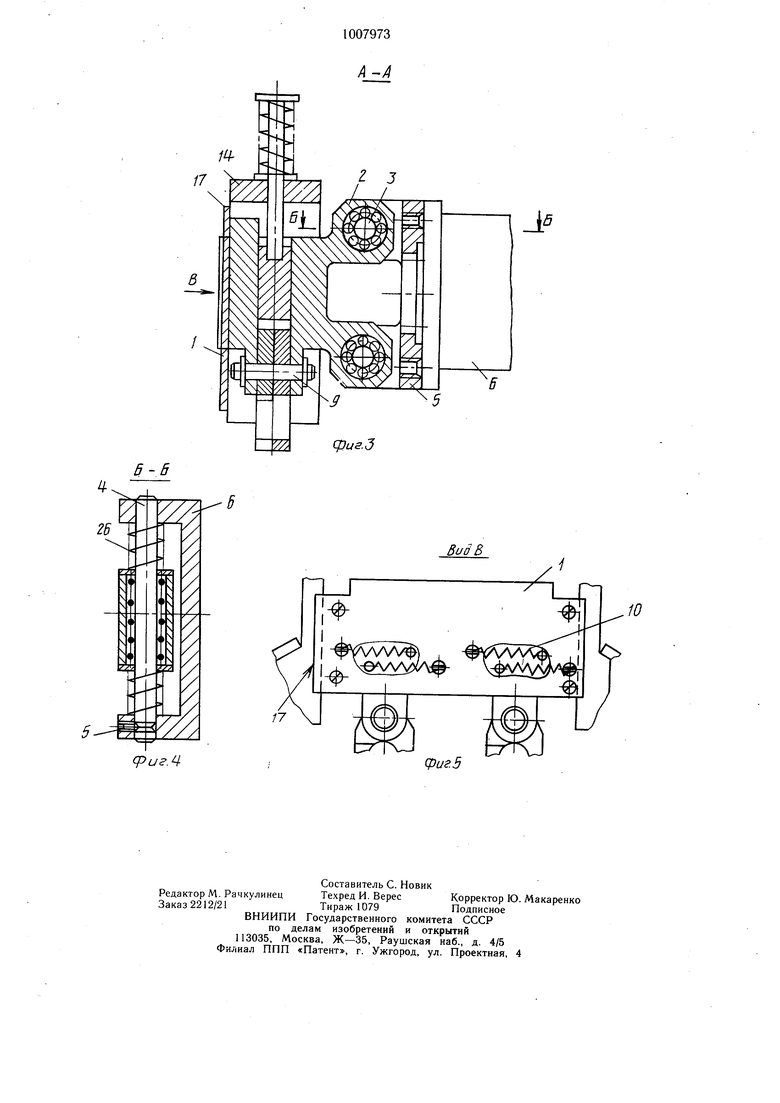
На фиг. 1 изображено захватное устройство в исходном положении, общий вид; на фиг. 2 - то же, в момент захвата пружины; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б (повернуто) на фиг. 3; на фиг. 5 - вид В на фиг. 3. Устройство имеет крышку 1, корпус 2, который через сепараторы 3 и оси 4 связан с переходным фланцем 5, соединяющим, в свою очередь, захватное устройство с рукой 6 робота. Корпус 2 подпружинен относительно руки 6. Между корпусом 2 и крышкой 1 размещен клиновой элемент 7, выполненный в виде двух спаренных клинов, взаимодействующих с рычагами захватов 8, которые шарнирно смонтированы на оси 9, размещены в нижней части корпуса 2 и подпружинены относительно него пружиной 10. На клиновом элементе 7 закреплен щток 11 силового цилиндра 12 привода и направляющие штанги 13, свободно перемещающиеся в отверстиях П-образной рамы 14. Последняя связана с корпусом 2 с помощью винтов 15 и пружин 16 и установлена в ребордах 17 корпуса.
На обоих концах рамы выполнены криволинейные пазы 18, в которых с возможностью перемещения расположены фиксаторы 19 захватываемой пружины 20, имеющие криволинейную форму, оканчивающуюся клиновыми наконечниками 21 и 22, причем клиновый наконечник 22 короче наконечника 21 на некоторую величину 6. Эта
разность предусмотрена для предотвращения попадания клина 22 в зазор между витками пружины таким образом, что происходит растяжение пружины 20. В боковой части фиксаторов имеются прорези, в которые вставлены болты 23, предохраняющие от выпадания фиксаторы 19, регулируемые с помощью болтов 24 и пружины 25. Жесткость пружин 16 выбрана заведомо больщей, чем жесткость пружин 25 и 26. Захватное устройство работает следующим образом.
В исходном положении рычаги захватов 8 раскрыты под действием пружины 10. На руку 6 робота поступает команда на опускание ее вместе со схватом к захватываемой пружине 20. При этом в идеальном случае фиксаторы 19 располагаются точно между витками пружины 20 и при перемещении руки вниз на заданный ход П-образная рама представляет собой балку на двух
0 опорах. Ход руки выбирается таким образом, что в его конце ось симметрии окна, образованного захватными рычагами, совпадает с осью сечения витка пружины 20. После этого подается команда на привод,
5 в порщневую полость силового цилиндра 12 поступает энергоноситель, и клиновой элемент 7, опускаясь закрывает рычаги схвата. Схват готов к переносу пружин.
В большинстве случаев захватываемые витки пружины 20, подготовленной к переносу, располагается произвольным образом по отношению к фиксаторам 19, поэтому в экстремальном варианте, когда при опускании схвата фиксатор упирается в сам виток, они занимают положение, указанное на фиг. 1, имея между собой и болтами 24
зазор А . Поскольку жесткость пружин 16 выбрана гораздо большей, чем у пружин 25 и 26, то при дальнейшем опускании схвата происходит деформация пружин 25 и перемещение фиксатора 19 с более длинным клиновым наконечником 21 по криволинейной траектории паза 18. При этом точка контакта этого фиксатора с витком пружины смещается вправо, и фиксатор занимает положение между двумя витками. Фиксатор с укороченным клиновым наконеч5 НИКОМ 22 вступает в контакт с пружиной несколько позже, когда его расположение между витками уже определено фиксатором с наконечником 21. Фиксаторы, устанавливаясь между витками и преодолевая сопротивление пружины 26, сдвигают вправо П-образ0 ную раму 14, которая совместно с корпусом 2 перемещается относительно присоединительного фланца до тех пор, пока фиксаторы не займут положение, указанное на фиг. 2. Далее процесс протекает так же, как указано выше.
Высвобождение детали происходит следующим образом.
3 10079734
Подается команда на сброс энергоноси--под действием пружины 26 возвращается
теля из полости силового цилиндра 12, вв исходное положение.
результате чего поршень поднимается вверхПредлагаемое захватное устройство пози перемещает клиновой элемент 7. Рычагиволяет повысить производительность при захватов 8 раскрываются и освобождают работе с пружинами в автоматическом репружину 20, а корпус с П-образной рамойжиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1988 |
|
SU1650432A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват | 1986 |
|
SU1315303A1 |
| Схват робота | 1981 |
|
SU994256A1 |
ЗАХВАТНОЕ УСТРОЙСТВО для деталей типа пружин, содержащее корпус, рычажный схват, клино.вой механизм разведения губок схвата и фиксирующие упоры, отличающееся тем, что, с целью расщирения технологических возможностей путем захватывания пружины за витки и повышения надежности, оно снабжено расположенными в корпусе П-образной рамой и дополнительным рычажным охватом, причем в раме выполнены криволинейные пазы, а фиксирующие упоры расположены в этих пазах с возможностью регулировочного перемещения, при этом клиновой механизм связан с П-образной рамой посредством дополнительно введенных направляющих щтанг и имеет клиновые элементы, число которых соответствует числу схватов. W ;о со
17
сригЯ
Вид В
СригВ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3292972/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
