лельно этим вершинам. Привод поворота модулей в обоих вариантах вьшол- нен в виде электромагнитов и постоянных магнитов, полюса которых образуют грани торцовых поверхностей соседних модулей. Дпя поворота модулей по первому и второму вариантам исполнения руки включают обмотки одного из электромагнитов с полярностью, обес - .
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации основных и вспомогательных операций в различных отраслях машино- и приборостроения.
Цель изобретения - расширение зоны обсл5гживания.
На фиг.1 изображены модули механической руки по первому варианту исполнения; на фиг.2 - механизм шарнирного соединения модулей по первому варианту исполнения; на фиг.З - модули механической руки по второму варианту исполнения; на фиг.4 - механизм шарнирного соединения модулей по второму варианту исполнения.
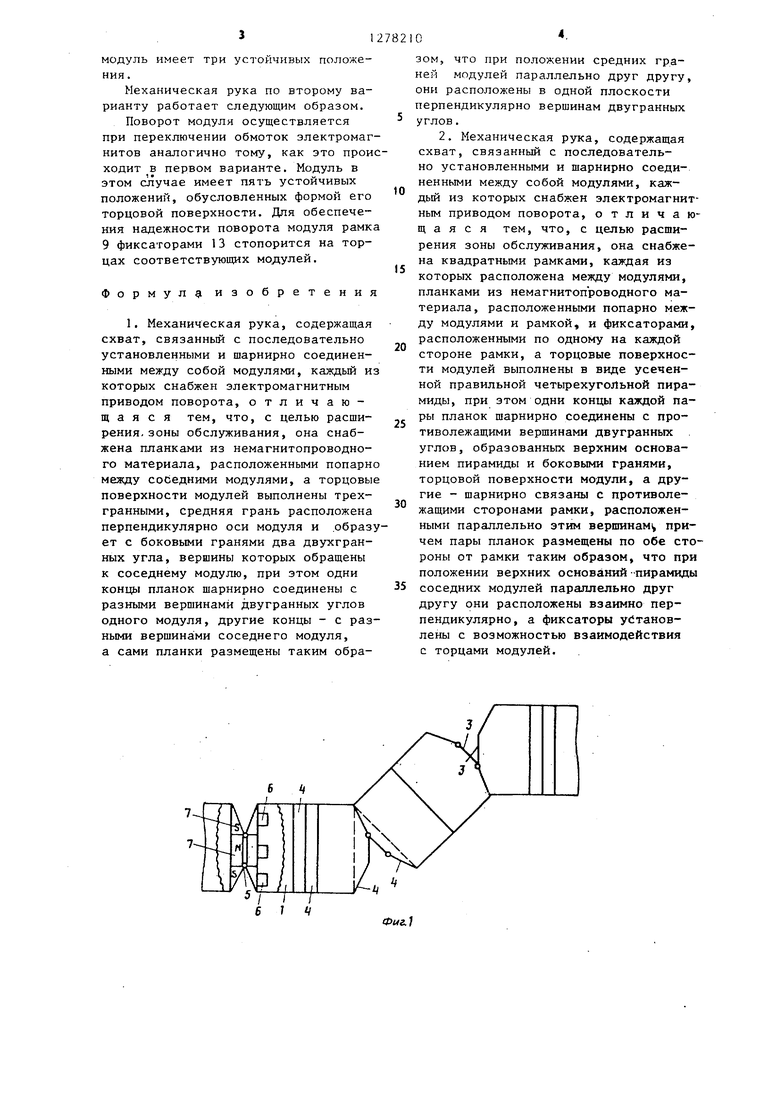
Механическая рука по первом / варианту исполнения содержит последовательно установленные и шарнирно соединенные между собой модули 1, между которыми попарно расположе- ны планки 2. Торцовые поверхности модулей выполнены трехгранными, средняя грань 3 расположена перпендикулярно оси модуля 1 и образует с боковыми гранями 4 два двугранных угла, вершины которых обращены к соседнему модулю. При этом одни концы планок 2 через шарниры 5 соединены с разными вершинами двугранных углов одного модуля, а другие - с разньми вершинами соседнего модуля Сфиг.2). Привод поворота модулей 1 вьшолнен в виде электромагнитов 6 и постоянных магнитов 7, полюса которых образуют грани торцовых поверхностей соседних модулей.
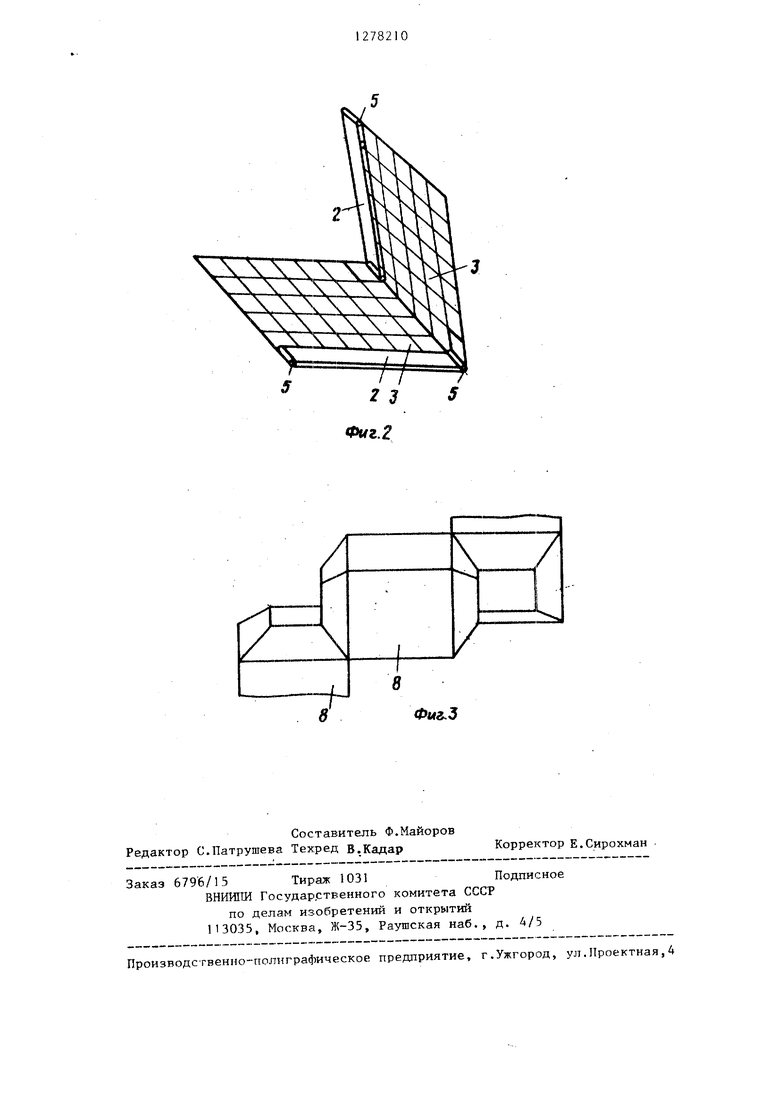
Механическая рука по второму варианту содержит последовательно успечивающей его притяжение к противолежащему постоянному магниту., и одновременно включают другой электромагнит, полюс которого расположен параллельно полюсу пос;тояниого магнита с полярностью,обеспечивающей их взаимное отталкивание При этом происходит noBopot медуля вокруг одной из вершин двухгранного угла.2с.,4 ил.
тановленные и шарнирно соединенные между собой модули 8, между .которыми установлены квадратные рамки 9, а между рамками 9 и модулями 8 расположены попарно планки 10. Торцовая поверхность модулей 8 вьшолнена в ви- виде правильной усеченной пирамиды, при этом одни конц1э1 каждой пары планок 10 соединены с помощью шарниров
11 с противолежащими вершинами двугранных углов, образованных верхним основанием пирамрщы и боковыми гранями, а другие с помощью шарниров 12 связаны с противолежащими сторонами
рамки 9, расположенными параллельно этим верп1инам. На каждой стороне рамки 9 установлены фиксаторы 13 с возможностью их взаимодействия с торцами модулей 8. Привод поворота модулей 8 вьшолнен в виде электромагни тов и постоянных магнитов (не показаны) , полюса которых образуют грани торцовых поверхностей соседних модулей.
Механическая рука по первому варианту работает следующим образом.
При включении обмотки одного из электромагнитов 6 с полярностью
обеспечивающей его притяжение к противолежащему постоянному магниту 7, и включение другого электромагнита, полюс которого расположен параллельно полюсу постоянного магнита, с
полярностью, обеспечивающей их взаимное отталкивание, происходит поворот модуля 1 в шарнирах 5 вокруг одной из верщин его двугра ного- угла. Дпя поворота в другую сторону, полярность включения электромагнитов меняется на обратную. Каждый
модуль имеет три устойчивых положения.
Механическая рука по второму варианту работает следующим образом.
Поворот модуля осуществляется при переключении обмоток электромагнитов аналогично тому, как это происходит в первом варианте. Модуль в этом случае имеет пять устойчивых положений, обусловленных формой его торцовой поверхности. Дпя обеспечения надежности поворота модуля рамка 9 фиксаторами 13 стопорится на торцах соответствующих модулей.
Формулу изобретения
1. Механическая рука, содержащая схват, связанный с последовательно установленными и шарнирно соединенными между собой модулями, каждый из которых снабжен электромагнитным приводом поворота, отличающаяся тем, что, с целью расширения, зоны обслуживания, она снабжена планками из немагнитопроводно- го материала, расположенными попарно между соседними модулями, а торцовые поверхности модулей выполнены трехгранными, средняя грань расположена перпендикулярно оси модуля и .образует с боковыми гранями два двухгранных угла, вершины которых обращены к соседнему модулю, при этом одни концы планок шарнирно соединены с разными вершинами двугранных углов одного модуля, другие концы - с разными вершинами соседнего модуля, а сами планки размещены таким обра
0
5
0
5
зом, что при положении средних граней модулей параллельно друг другу, они расположены в одной плоскости перпендикулярно вершинам двугранных углов.
2. Механическая рука, содержащая схват, связанный с последовательно установленными и шарнирно соединенными между собой модулями, каждый из которых снабжен электромагнитным приводом поворота, отличающаяся тем, что, с целью расширения зоны обслуживания, она снабжена квадратными рамками, каждая из которых расположена между модулями, планками из немагнитоп роводного материала, расположенными попарно между модулями и рамкой, и фиксаторами, расположенными по одному на каждой стороне рамки, а торцовые поверхности модулей выполнены в виде усеченной правильной четьфехугоЛьной пирамиды, при этом одни концы каждой пары планок шарнирно соединены с противолежащими вершинами двугранных углов, образованных верхиим основанием пирамиды и боковыми гранями, торцовой поверхности модули, а другие - щарнирно связаны с противолежащими сторонами рамки, расположенными параллельно этим вершинам, причем пары планок размещены по обе стороны от рамки таким образом, что при положении верхних оснований-пирамиды соседних модулей параллельно друг другу они расположены взаимно перпендикулярно , а фиксаторы установлены с возможностью взаимодействия с торцами модулей.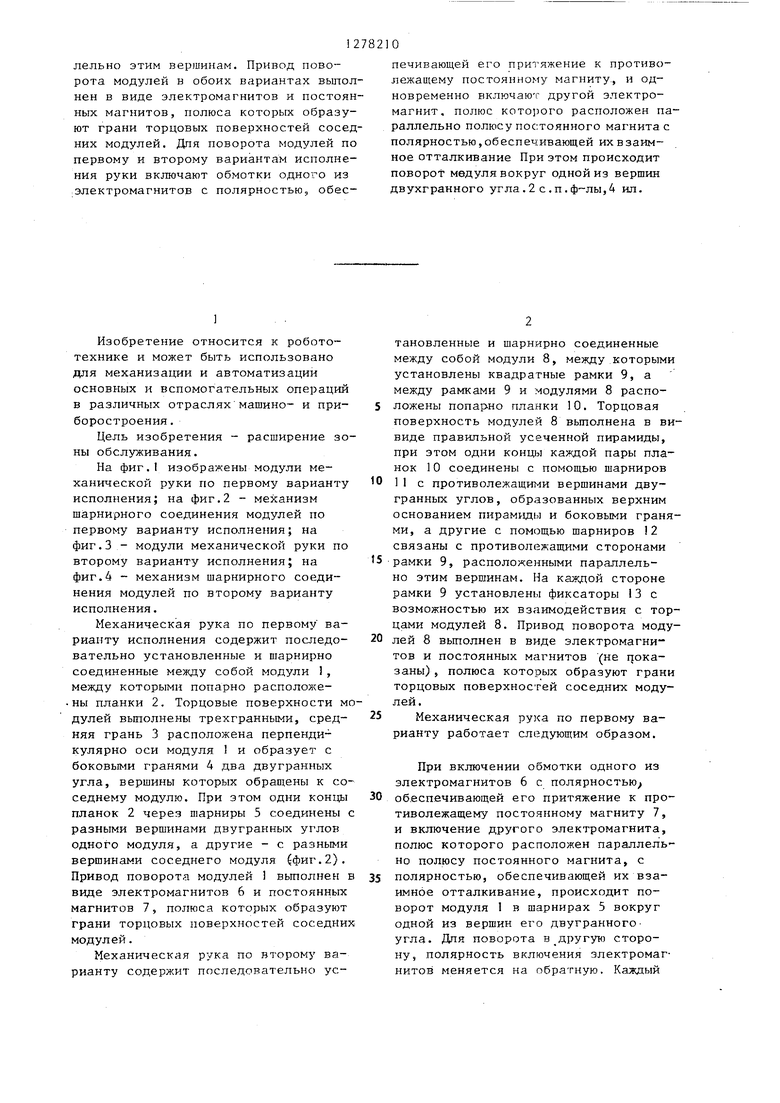
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1987 |
|
SU1451010A2 |
| Рука робота | 1985 |
|
SU1284819A1 |
| Рука робота | 1987 |
|
SU1458202A1 |
| Механическая рука | 1987 |
|
SU1451009A2 |
| МАГНИТНЫЙ СТИМУЛЯТОР БИОПОЛЯ ЧЕЛОВЕКА | 1995 |
|
RU2099104C1 |
| "Сборная пространственная головоломка "Ребристый еж" | 1990 |
|
SU1747112A1 |
| ПРИЗМЕННЫЙ УГОЛКОВЫЙ ОТРАЖАТЕЛЬ | 1991 |
|
RU2101739C1 |
| Поляризационное устройство для измерения углов скручивания | 1991 |
|
SU1825971A1 |
| МНОГОПОЗИЦИОННАЯ ВРАЩАЮЩАЯСЯ УСТАНОВКА ДЛЯ ДЕМОНСТРАЦИИ ИНФОРМАЦИОННЫХ МАТЕРИАЛОВ | 2007 |
|
RU2336575C1 |
| Призменный уголковый отражатель | 1991 |
|
SU1774304A1 |
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации основных и вспомогательных операций в различных отраслях машино- и приборостроения . Целью изобретения является расширение рабочей зоны руки. Механическая рука по первому и второму вариантам содержит последовательно установленные и шарнирно связанные между собой модули, несущие охват. Модули по первому варианту исполнения руки имеют трехгранную торцовую поверхность, средняя грань которой расположена перпендикулярно оси модуля и образует с боковыми гранями.двугранные углы. Модули связаны между собой планками, одни концы которых через шарниры гсоедине- ны с разными вершинами двугранных углов одного модуля, а другие - с разными вершинами соседнего модуля. Модули по второму варианту имеют торцовую поверхность в виде правильной усеченной пирамиды, и между, модулями расположена рамка 9, шарнирно связанная с модулями через планки 10, одни концы которых соединены через шарниры 11 с противолежащими вершинами двугранных углов, образованных верхним основанием пирамиды и боковыми гранями, а другие через шарниры 12 связаны с противолежащими сторонами рамки 9, расположенными паралг- с 9 (Л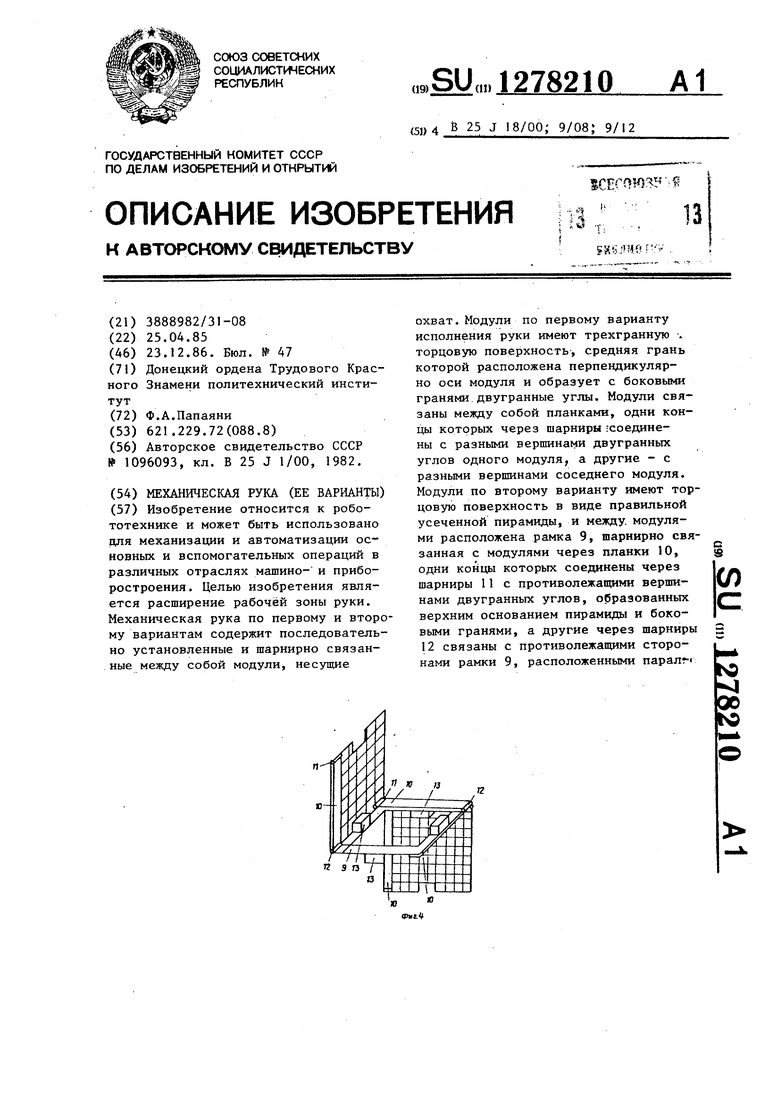
Фиг.1
Фмг.З
Составитель Ф.Майоров Редактор С.Патрушева Техред В.Кадар
Заказ 6796/15 Тираж 1031Подписное
ВНИИПИ Государ,стЕ1енного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Е.Сирохман .
| Механическая рука | 1981 |
|
SU1096093A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
