1
Изобретение относится к робототехнике и может быть использовано дл механизации и автоматизации основных и вспомогательных операций в различ- ных сэтраслях машино- и приборостроения .
Цель изобретения - расширение рабочей зоны.
На фиг. 1 изображены модули механической руки; на фиг.2 - механизм шарнирного соединения модулей.
Механическая рука содержит после- довател но установленные и шарнирно соединенные между собой модули 1, между которыми попарно расположены планки 2. Торцовые поверхности модулей выполнены трехгранными. Средняя грань 3 расположена перпендикулярно оси модуля 1 и образует с боковыми гранями 4 два двугранных угла, вершины которых обращены к соседнему модулю, Пр и этом одни концы планок 2 через шарниры 5 соединены с разными вершинами двугранных углов одного модуля, а другие - с разными вершинами соседнего модуля (фиг. 2). Привод поворота модулей 1 выполнен в виде электромагнитов 6 и постоянных магнитов 7, полюса которых образуют грани торцовых поверхностей соседних моделей.
Каждый из модулей 1 выполнен состоящим из нескольких частей с приводами их относительного перемещения. Для регулирования угла поворота модулей он разделяется на части так, что на двух частях 8 и 9 находятся боковые грани двугранных углов
5
0
5
0
5
одной из торцовых поверхностей модуля и эти части установлены с возможностью поворота вокруг осей 10, совпадающих с вершинами этих углов. Поворот частей 8 и 9 осуществляется с помощью привода 11, шток 12 которого через шарнирно связаннь1е звенья 13 соединен с этими частями. Кроме того, для изменения длины модуля 1 он может содержать части 14 и 15, на каждой из которых расположена противоположная торцовая поверхность модуля, а привод взаимного перемещения этих частей выполнен в виде линейного привода 16, расположенного вдоль оси модуля.
Механическая рука работает следующим ообразом.
При включетдаи обмотки одного из электромагнитов 6 с полярностью, обеспечивающей его притяжение к противолежащему постоянному магниту 7, и включении другого электромагнита, полюс которого расположен параллельно полюсу постоянного момента, с полярностью, обеспечивающей их взаимное отталкивание, происходит поворот модуля 1 в шарнирах 5 вокруг одной из верщин его двугранного угла. Для поворот а в другую сторону полярность включения электромагнитов меняется на обратную. Каждый модуль имеет три устойчивых положения при фиксированных углах наклона частей 8 и 9. При выдвижении штока 12 посредством звеньев 13 происходит поворот частей 8 и 9 с магнитами 7 вокруг осей 10. Тем самым меняется угол
расположения магнитов и, следовательно, угол поворота модулей. Для обеспечения линейного удлинения модуля обеспечивается вьщвнжение штока 12, перемещаюп;его части 14 и 15 одну относительно другой в продольном направлении. Формула изобретения
. Механическая рука по авт. св. № 1278210, отличающаяся тем, что, с целью расширения рабочей зоны, каждый модуль выполнен из нескольких частей и снабжен приводами перемещения этих частей одна относительно другой.
Д51010
2. Рука по п. 1,отли ча- ю щ а я с я тем, что боковые грани двугранных углов находятся соответ- ственно на двух частях модуля, которые установлены с возможностью пово- рота вокруг оси совпадающей с вершиной соответствующего двугранного угла.
3. Рука по пп. 1 и 2, отличающаяся тем, что торцовые поверхности модуля находятся соответственно на двух частях, а привод g относительного перемещения этих частей вьтолнен в виде линейного привода, установленного вдоль оси модуля.

| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| Рука робота | 1985 |
|
SU1284819A1 |
| Механическая рука | 1987 |
|
SU1451009A2 |
| Рука робота | 1987 |
|
SU1458202A1 |
| Механическая рука | 1981 |
|
SU1096093A1 |
| Рука манипулятора | 1986 |
|
SU1315289A1 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Манипулятор | 1986 |
|
SU1323363A1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ | 2010 |
|
RU2525740C2 |
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации основных и вспомогательных операций в различных отраслях маиино- и приборостроения. Целью изобретения является расширение рабочей зоны. Механическая рука содержит последовательно установленные и шарнирно связанные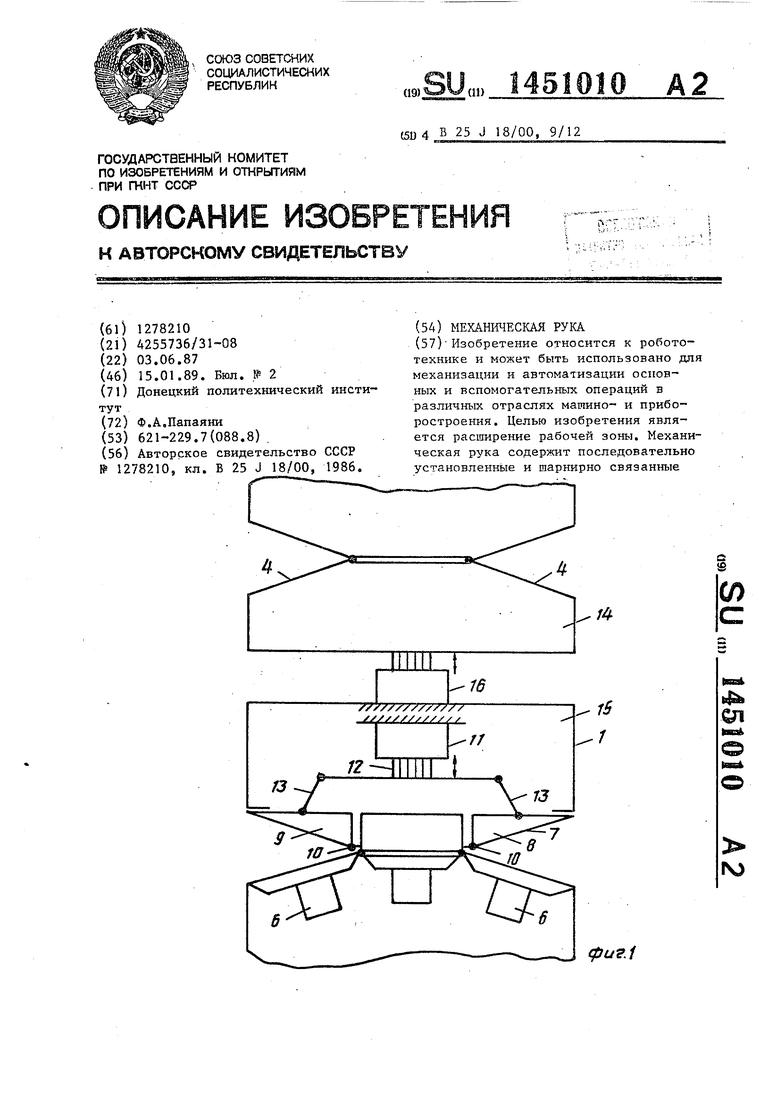
Ч ч ч у-у
чЧЧЧчХХ.
;
ч
.Z
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
