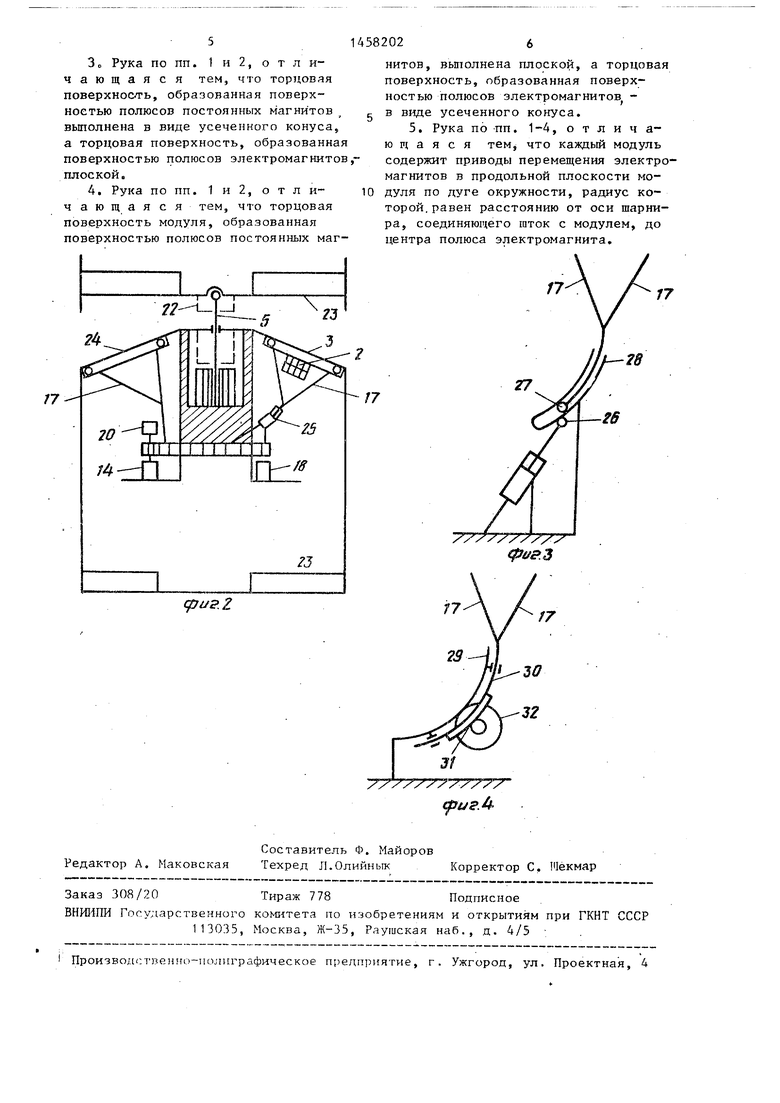
нейного перемещения (сиповой цилинд
шток которого через шарнир 26 толкает ползунок 27, который движется по соответствующим направляющим 28, и обеспечивает движение по упомянутой выгае траектории. Другой вариант привода 25 включает направлякнцую 29, подвижной шток 30 в форме дуги окружности, на котором установлена зубчатая передача 31, приводимая в движение двигателем 32.
Рука работает следующим образом.
В исходном положении модуля 1 руки робота образуют прямую за счет отключения электромагнитов 2 и включения электромагнита 4, который втягивает шток 5. При включении фиксатора 9 пята 8 жестко сцепляется с ним и пружиной 10, исключая тем самы круговое вращение модулей вокруг оси штока 5.
Для того чтобы повернуть модули один относительно другого, выключают фиксатор 18 и включают двигатель 14. Через зубчатые передачи 15 и 16 начинает поворачиваться основание 12 вместе с электромагнитами 2. После того как разворот на нужный угол сделан, двигатель 14 вьпслючают, фиксатор 18 стопорит зубчатое колесо 16 Таким образом, полюса 3 повернуты относительно соседнего модуля на некоторый угол. При включении электромагнитов 2 между их полюсами 3 и полюсами противолежащих магнитов 11 возникает сила магнитного притяжения При выключении электромагнита 4 шток 5 под действием пружины 6 поднимается, модуль поворачивается под действием силы магнитного притяжения в
Аналогично осуществляется поворот модуля в каждое из направлений, определяемое поворотом основания 12, Работа руки робота с постоянно
фиксированным штоком 5 аналогична. Отличие заключается в том, что пружина 22 не позволяет модулю вращаться вокруг оси штока 5, к которому она прикреплена. Различное вьщвиже-.
ние электромагнитов 2 в продольных плоскостях позволяет установить требуемый угол поворота модулей. Формула изобретения
1 . Рука робота, содержаща я последовательно установленные и шарнирно , связанные между собой модули, каждьй из которых имеет электромагниты, поверхности полюсов которых образуют одну из торцовых поверхностей модуля постоянные магниты, поверхности полюсов которых образуют другую торцовую поверхность.модуля, и привод линейного перемещения5 шток которого шарнирно связан с соседним модулем, отличающаяся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны, каждый модуль снабжен приводом поворота электромагнитов вокруг продольной оси модуля и управляемым фиксатором положения электромагнитов относительно модуля, а шток привода линейного перемещения снабжен фиксатором его поворота относительно соседних модулей.
2. Рука по п. 1, отличающаяся тем, что.один из фиксаторов штока выполнен управляемым.
(puff.l
17
Z7
1/.3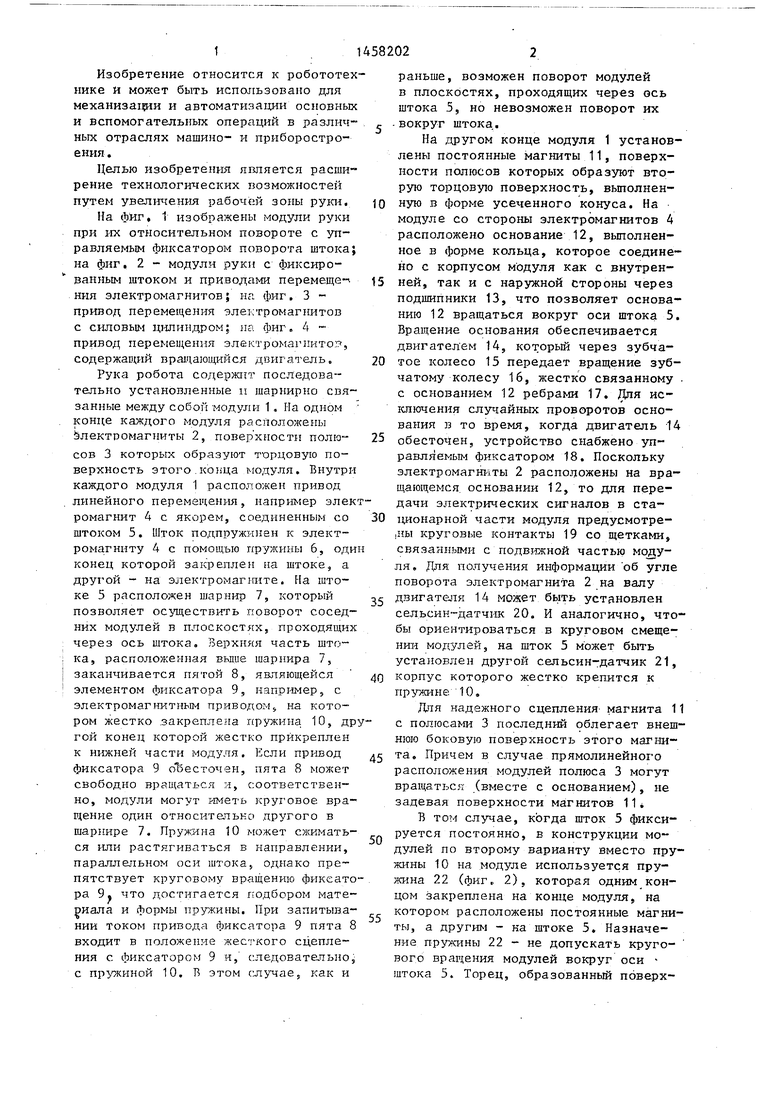

| название | год | авторы | номер документа |
|---|---|---|---|
| Рука робота | 1985 |
|
SU1284819A1 |
| Механическая рука | 1987 |
|
SU1451010A2 |
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| Привод поворота кинематических звеньев | 1990 |
|
SU1757865A1 |
| Механическая рука | 1981 |
|
SU1096093A1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ | 2010 |
|
RU2525740C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ, ВКЛЮЧАЮЩИЙ ПУСКАТЕЛЬ С МАГНИТНЫМИ ЭЛЕМЕНТАМИ | 2010 |
|
RU2526463C2 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
Изобретение относится к робототехнике и может быть использовано для механизагдии и автоматизации основных и вспомогательных операций в различных отраслях машино- и приборостроения. Целью изобретения является .расширение технологических возможностей за счет увеличения рабочей зоны руки. Рука робота состоит из последовательно установленных и шарнирно связанных между собой модулей, торцовые поверхности каждого из которых образованы соответственно торцовыми поверхностями полюсов электромагнитов 2 и постоянных магнитов 1i, Поворот модулей вокруг шарнира 7 происходит при выключении электромагнита 4 привода штока 5 и взаимодействии постоянных магнитов 11 одного из модулей с электромагнитами 2 соседнего модуля. Дпя осуществления поворота вокруг продольной оси модуля включается двигатель 14, вращающий в подшипниках 13 основание 12, на котором расположены электромагниты 2. Кроме того, электромагниты т акже могут перемещаться по дуге окружности с центром, совпадаюппгм с шарниром 7, для регулирования угла относительного поворота модулей. 4 з.п.ф-лы. 4 ил. to О)
| Рука робота | 1985 |
|
SU1284819A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
