112
Изобретение относится к измери- тельной технике и может быть использовано в доплеровских измерителях действительной скорости движения наземных транспортных средств, в ча- стиости промьшленных и сельскохозяйственных тракторов.
Целью изобретения является уменьшение погрешности измерения действительной скорости движения,
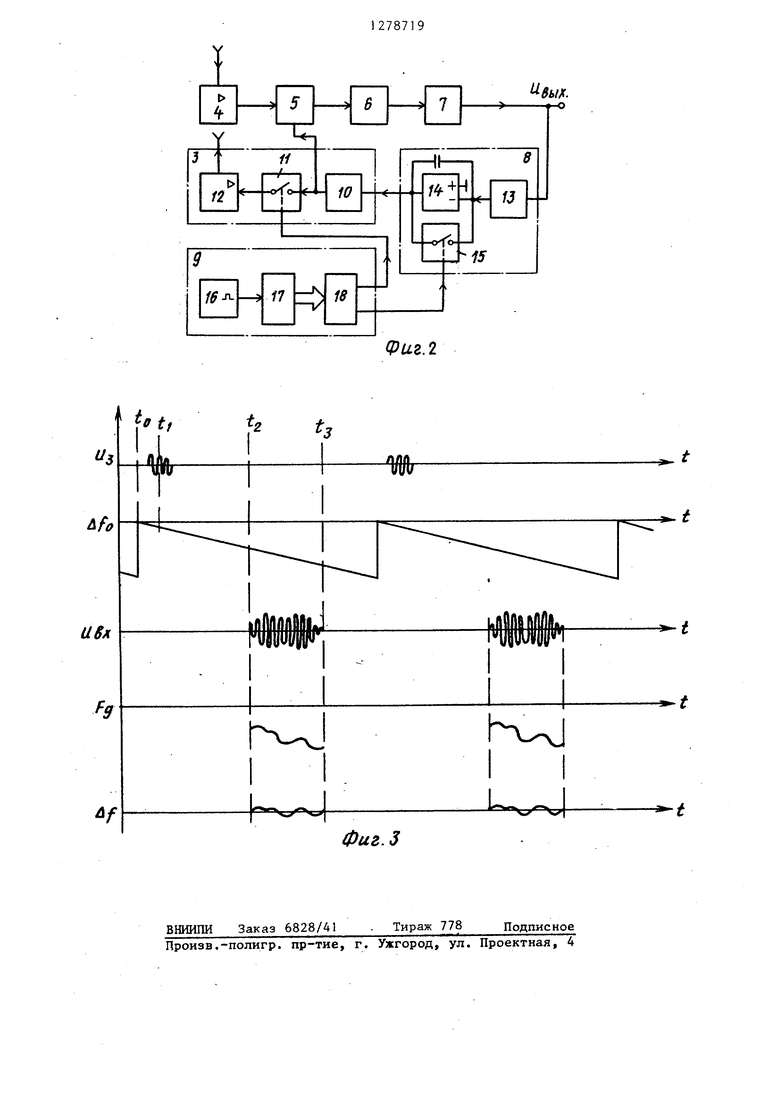
На фиг. 1 схематично показано расположение измерителя действительной скорости на транспортном средстве и возможные направления распространения зондирующего излучения; на фиг, 2 - структурная схема предлагаемого устройства; на фиг, 3 - временная диаграмма, поясняющая его работу.
Устройство 1 для измерения дей- ствительной --скорости движения наземного транспортного средства 2 содержит передатчик 3, входной блок 4, блок 5 определения разности частот или амплитуд, входы которого подключены к выходам передатчика 3 и входного блока 4, а выход через блок 6 преобразования разности частот или периодов в напряжение и выходной блок 7 подключен к выходной шине устройства и первому входу генератора 8 пилообразного напряжения второй вход и выход которого подключены соответственно к первому входу передатчика 3 и первому выходу тактового генератора 9, второй выход которого подключен к второму входу передатчика 3,
Передатчик 3 может быть выполнен на базе управляемого (перестраива- емого) генератора 10, коммутатора (амплитудного модулятора) 11 и усилителя 12 мощности. Генератор 8 пилообразного напряжения может быть выполнен на базе преобразователя 13 напряжения в ток (управляемого источника тока), интегратора 14 и разрядного ключа 15, Тактовый генератор 9 может содержать генератор
16прямоугольных импульсов,счетчик
17и дешифратор 18,
В качестве входного устройства 4 может быть использован избирательный усилитель. При реализации устройства в анлоговой форме блок 5 но жет быть выполнен в виде синхронного детектора (смесителя) при реализации в цифровой форме - в виде двух измерителей длительности пери92
одов входных сигналов и устройства вычитания результатов измерения периодов. Блок 6 преобразования разности частот или периодов в напряжение может быть выполнен в виде частотомера с двухполярным аналоговым выходом или преобразователя кода раности периодов или частот в напряжение .
Поясним-суть предложенного способа на примере работы устройства. Передатчик 3 измерителя 1 действительной скорости, расположенного на транспортном средстве 2, генерирует зондирующее излучение, которое излучается передающей антенной в направлении поверхности грунта (фиг,1 После отражения от поверхности грунта зондирующее излучение принимается приемной антенной, также расположенной на транспортном средстве 2, В этом случае величина доплеров- ского сдвига частоты определяется по известной формуле
тг - 2V t Т
где Fq - величина доплеровского
° сдвига частоты; V - действительная скорость
движения транспортного срства; А - длина волны зондирующего
излучения;
об - угол падения зондирующего излучения на поверхность грунта (фиг, 1), Из этой формулы следует, что
v. ,
2coso6
Для точного измерения действительной скорости необходимо иметь точные значения величин Рл , и угла «6 , Длина волны зондирующего излучения, как правило, известна заранее. Величина доплеровского сдвига частоты может быть измерена известными методами с высокой точностью, Позтому точность измерения дествительной скорости в решающей степени зависит от изменений реального направления распространения зодирующего излучения, т,е. изменений угла об , Величина угла падения зондирующего излучения на поверхность грунта не всегда совпадает с положением максимума диаграмм правленности антенн и не поддается
прямому измерению. Если, например, положение максимума диаграммы направленности антенны соответствует приему отраженного сигнала от точки а грунтовой поверхности (фиг. 1), то в действительности при отражении от статической шероховатой поверхности коэффициент отражения (обратного рассеяния) зондирующего излучения в точке а, может быть близок к нулю и основная часть принимаемой энергии достигнет приемной антенны после отраж.ения от некоторой точки Ъ (участка поверхности), находящейся в пределах главного или одного из боковых лепестков диаграммы направленности этой антенны (фиг. IT). Нетрудно определить, что при отклонении угла падения на угол Лоб 5 (что лежит в пределах основного .лепестка диаграмм направленности антенн, устанавливаемых на транспортных средствах) от предполагаемого направления приема отраженного излучения oi. 45 приводит к возникновению ошибки измерения действительной скорости величиной 9%.
Суть предложенного способа заключается в обеспечении независимости результатов измерения действительной скорости транспортного средства от положения эффективной точки отражения зондирующего излучения от статически шероховатой грунтовой поверхности в направлении вектора скорости транспортного средства. Управляемый генератор 10. передатчика 3 (фиг. 2) работает в режиме непрерывной генерации высокочастотных колебаний фиксированной -амплитуды. Частота этих колебаний f (фиг.З) изменяется по линейному закону в зависимости от выходного сигнала генератора 8 пилообразного напряжения.
В момент времени t| (фиг.З) тактовый генератор 9, построенный по принципу распределителя импульсов, формирует короткий импульс управления разрядным ключом 15 интегратора 14. Выходной сигнал генератора 8 пилообразного напряжения становится равн ым нулю и в дальнейшем i возрастает по линейному закону. В момент времени t, тактовьй генератор 9 формирует короткий прямоугольный импульс, управляющий коммутатором П. На вход усилителя 12 мощности подключается выходной сигнал управляемого генератора 10 и передатчик 3
78719
при помощи передающей антенны излучает короткий зондирующий импульс (фиг. 3, Uj). Этот импульс распространяется во всех направлениях, соот- 5 ветствующих углам раскрыва главного и боковых лепестков диаграммы направленности антенны, т.е. во всех направлениях в пределах угла Acyi (фиг. 1).
10 В момент времени t зондирующее излучение,отраженное от точки а грунтовой поверхности (фиг. 1, U ), достигает приемной антенны. В этот момент времени принимается только 15 сигнал, отраженный от точки а, так как более близкие к транспортному средству 2 участки грунтовой поверх- ности лежат вне главного и боковых лепестков диаграммы направленности 20 антенны, а прием от более дальних участков поверхности соответствует большему-времени распространения излучения. Величина доплеровского сдвига частоты в этот момент времени 25 пропорциональна cosot,.
Если предположить, что длительность зондирующего импульса значительно меньше разности времени распространения излучения от транспорт- 30 ного средства 2 до точки Ъ и обратно и от транспортного средства 2 до точки а и обратно, то в момент времени t- будет осуществляться прием излучения, отраженного от точки Ъ. Величина доплеровского сдвига частоты в этом случае будет пропорциональна COStsiy.
в любой промежуток времени между tj и tg будет осуществляться прием Q излучения от некоторой поверхности точки, расположенной между точками а и Ъ и соответственно величина доплеровского сдвига частоты будет иметь промежуточное значение. : Cos oi, cos поэтому величина доплеровского сдвига частоты принимаемого сигнала будет с течением времени монотонно возрастать (фиг.З, FO. ). Отклонения закона изменения до- to плеровского сдвига частоты во времени от линейного связаны с шероховатостью грунтовой поверхности, вызывающей нелинейные изменения времени распространения зондирующего излучения при смещении точки отраже35
55
ния по курсу движения транспортного средства 2.
В предложенном способе измерения и реализации его устройства величи5 12
на действительной скорости транс- портнот о средства определяется не по значению доплеровского сдвига частоты в какой-либо фиксированный момент времени, а по спектру доплеров- ского сигнала с учетом его изменения во времени в модуляпионном интерва- ле.
Если выходное напряжение устройства соответствует действительной скорости движения, то величина выходного напряжения генератора 8 пи- лоббразного напряжения, а следовательно, отк лонение частоты перестраиваемого генератора 10 от исходной величины и интервале времени соответствует доплеровскому сдвигу частоти (фиг, 3 Ufд, РЛ ). Выходной сигнал блока 5 измерения разности частот или периодов близок к нулю (фиг. 3, uf). Незначительные флуктуации частоты, преобразованные блоком 6 в напряжение с нулевым сред- ним значением, сглаживаются блоком 7 интегрирования и не оказывают вли- яния на величину выходного напряжения устройства.
При изменении скорости движения транспортного средства происходит пропорциональное изменение доплеров- ского сдвига частоты всех составляющих принимаемого сигнала и среднее значение разности частот и.яи периодов, а следовательно, и выходного напряжения блока 7 интегрирования становится отличным от нуля. В результате этого выходное напряжение блока 7 интегрирования, а следовательно, и выходное напряжение уст- .ройства начинает изменяться до моме та согласования крутизны пилообразного на.пряженИя и соответственно девиации частоты перестраиваемого генератора 10 с новыми значениями до- плеровских сдвигов частоты всех сое тавляющих принимаемого сигнала.
После достижения этого соответствия среднее значение величины (фиг. 3) равно нулю, соответственно равно нулю среднее значение входно- то напряжения интегратора 7 и на выходе устройства сохраняется напряжение, соответствующее новому значению действительной скорости движени транспортного средства.
Формула изобретени
1, Способ измерения действительной скорости движения наземных
96
транспортных средств путем формирования зондирующего излучения с линейной частотой модуляции, его передачи в направлении поверхности грунта, приема на транспортном средстве отраженного сигнала, выявления разности частот или периодов переданного и принятого сигналов и последующего формирования выходного сигнала измерителя в зависимости от амплитуды промежуточного сигнала, о т- личающийся тем, что, с. целью уменьшения погрешности, дополнительно воздействуют на глубину ча-, стотных модуляций в зависимости от величины выходного сигнала измерителя, а промежуточный сигнал получают путем преобразования указанной разности частот или периодов в напряжении .
2. Устройство для измерения действительной скорости движения наземных транспортных средств, содержащее передатчик, входной блок, генератор пилообразного напряжения, выходной блок, тактовый генератор и блок определения разности частот или периодов, первый и второй входы которого подключены соответственно к выходам блока и передатчика, пер- вьй вход которого подключен к выходу генератора пилообразного напряжения, а первый выход тактового генератора соединен с первым входом ге- нератора пилообразного напряжения, отличающееся тем, что, в него дополнительно введен блок преобразования разности частот или периодов в напряжение, вход и выход которого подключены соответственно к выходу блока определения разности частей или периодов и к входу выходного блока, выход которого соединен с вторым входом генератора пилообразного напряжения, а второй выход тактового генератора соединен с вторым входом передатчика.
3,Способ по п. 1, отличающийся тем, что формирование выходного сигнала измерителя осуществляют путем интегрирования напряжения, соответствующего амплитуде промежуточного сигнала.
4.Устройство по п. 2, отличающееся тем, что выходной блок выполнен в виде интегратора.
/5 f7 -f 18
Фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения действительной скорости движения наземных транспортных средств и устройство для его осуществления | 1989 |
|
SU1835528A1 |
| Способ измерения рабочей скорости почвообрабатывающих и землеройно-транспортных машин | 1990 |
|
SU1723267A1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2022 |
|
RU2793338C1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО ГОМОДИННОГО РАДИОЛОКАТОРА | 2000 |
|
RU2189055C2 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| РАДИОЛОКАТОР | 2000 |
|
RU2178185C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ И УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ПОЛНОГО ВЕКТОРА СКОРОСТИ МЕТЕОРОЛОГИЧЕСКОГО ОБЪЕКТА | 2014 |
|
RU2602274C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
Изобретение относится к измерительной технике и позволяет уменьшить погрешности измерений действительной скорости движения. Для этого обеспечивается независимость результатов измерения действительной скорости транспортного средства 2 (тс) от положения эффективной точки отражения зондирующего излучения и от статически шероховатой грунтовой поверхности в направлении вектора скорости транспортного средства. Величина действительной скорости ТС 2 определяется по спектру доплеров- ского сигнала с учетом его изменения во времени в модуляционном интервале, При изменении скорости движения происходит пропорциональное изменение доплеровского сдвига частоты принимаемого сигнала и среднее значение разности частот, в результате выходное напряжение изменяется до момента согласования крутизны пилообразного напряжения и соответственно девиации частоты и генератора с новыми значениями до- плеровских сдвигов частоты всех сос- тавлякицих принимаемого сигнала. 2 с.п. ф-лы, 2 з.п. ф-лы, 3 ил. с SS (Л Фиг. I
ибл
f9
hv
hx
f
Фиг.З
I
| Патент CUIA № 3898052, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СУПРАСТРУКТУРА ДЛЯ ПРОТЕЗИРОВАНИЯ НА ИМПЛАНТАТАХ | 1998 |
|
RU2126663C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
