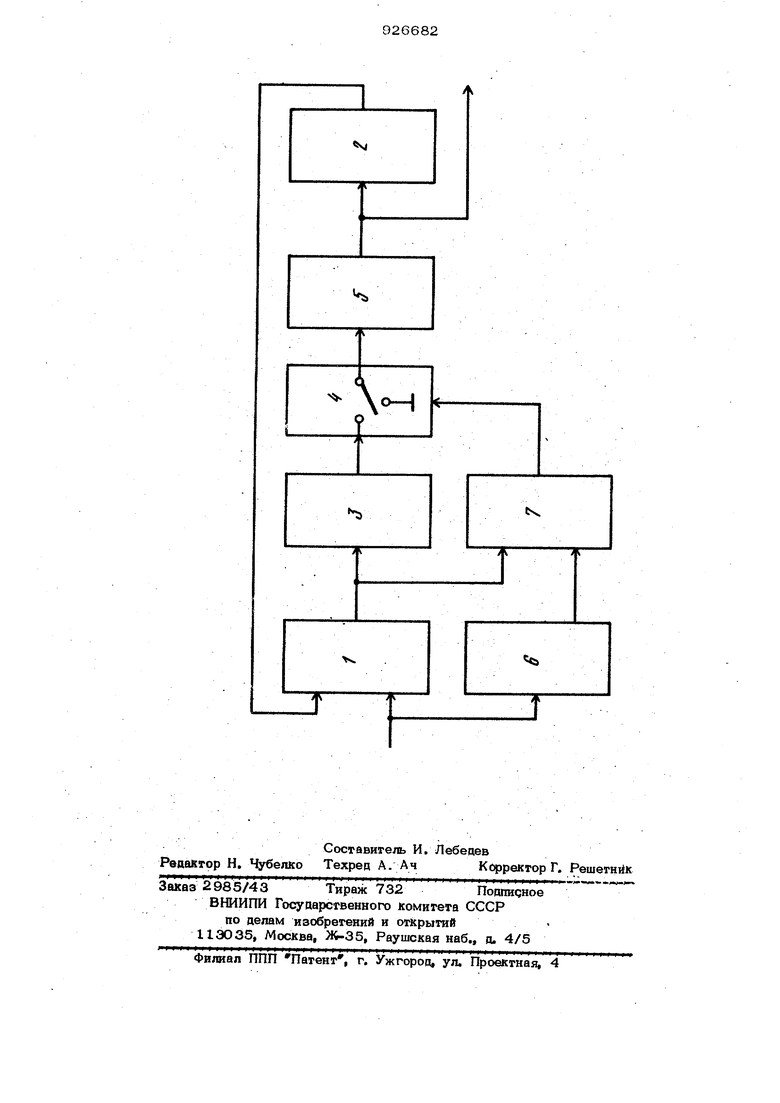
Устройство относится.к автоматизированному управлению и аналоговой вычислитёлыюй технике и гфедназначено для решения линейных интегральных уравнений Вольтерра первого роца. Известно устройство, прецназначенное для получения устойчивогб, приближенного решения ооной некорректной задачи - дифференцирования зашумленного аналогового сигнала. Эта задача является частным случаем интегрального упрсяиения Воль- терра первого рода, когда яаро интегрального уравнения - единичное 1 . Однако указанное устройство не позволяет решить интегральные уравнения первого рода р ядром общего вида. Известно также устройство, содержащее модель интегрального оператора, сум:Матор, нелинейный блок. Однако это устройство позволяет поду чить устойчивое решение интегрального уравнения Вольтерра второго рода, а уравнение первого рода этим устройством реша ться не может. Наиболее близким по технической сущности к предлагаемому является устройство, содержащее обратный сумматор, инвертор, функциональный преобразователь и источник воспроизведения заданной функции 2. Однако это устройство не .учитывает некорректность решаемой задачи, которая . проявляется в отсутствии устойчивости решения и погрешности в исходных данных (если на вход устройства полезный сигнал поступает в смеси с шумом, то решение на выходе может значительно отличаться от точного). Недостатками данного устройства являются также его низкая помехозащищенность и невысокая точность решения интегральных уравнений первого роца. Цель изобретения - -повышение устойчивости и точности моделирования. Указанная цель достигается тем, что в ух:тройство для решения линейных интегральных уравнений, содержащее сумматор, первый вход которого является вхо392дом устройства, и первый функциональный преобразователь, выход которого соедийен со вторым входом сумматора, дополнительно введены второй функциональный преобразователь, коммутатор, интегратор, блок определения дисперсии щумв и коммутатор, причем выход сумматора соединен со входом второго функционального преобразователя, выход которого через коммутатор соединен со входом интегратора, выход которого является выходом устройства и соединен со входом первого функционального преобразователя, сумматора соединен с первым входом коммутатора, второй вход которого подключен к выходу блока определения диоперсии иаума, вход которого связан с пе| вым входом сумматора, а выход коммутатора соединен, с управляющим входом ком мутатора. При решении интегральных урайиёний с разностным ядром модель интегрального оператора моясет быть выполнена в виде активного динамического звена с операционными усилителями (динамического линейного преобразователя). На чертеже изображена блок-схема устройства для решения линейных интегра льных уравнений первого рода. Устройство содержит сумматор I, пер вый функцисмалшый преобразователь 2, второй функциональный преобразователь 3, коммутатор 4, интегратор 5, блок 6 определения дисперсии шума и коммутатор 7. „ Принцип работы устройства основан на даиамическрм методе регуляризации решения некорректно поставленных задач, .Устройство решает линейное интеграль ное уравнение Вояьтерра первого рода Jн(t,t)x(г)cft-f(t.) (1) .0 которое йЯя разностного ядра K(1,t) K(t-T) может бы5ъ записано в изобретениях Лапласа следующим образом. K(p)X(p)-F(p) .K(p)f(t), X(p)x(tb -F(p)Hf(t) Согласно динамическому методу регугуляризапии вместо (2) необходимо решать уравнение ГР(Р) с(Р)(Р(р)-МР)Н(Р)) (3). Т0, с р - передаточная функция ко)екгирующего звена, введенного для 2 ликвидации струкчурной неустойчивости cxeмы,tl(P) выбирается так, чтобы обео печить устойчивость моделирующей схемы и апериодический характер переходного процесса. Так, например, передаточную функцию корректирующего звена, удсжлетворяющего этим требованиям, всегда можно взять в виде пробной рацишальной функции ылр)г 1±а± 11-1лл11«к WcV ,..6п в устройстве в качестве корректирую- щего звена используется второй функциональный преобразователь 3. Первый функциональный преобразователь реализует следующее преобразование cLCx(01 UCt,r)xCt)dr , р . где X. ( t) - значение входной переменной, X С ( t )1 - значение выходной переменной, К (t,r) - ядро интегралы ого уравнения. Устройство работает следующим образом. На первый вход сумматора I ncciytiaeT .ВХОДНОЙ сигнал f (t), представляющий собой смесь (толезного сигнала с шумом, а на первый вход коммутатора 7 - сигнал, пропорциональный величине дисперсии щума входного сигнала d , полученный на выходе блока 6. Если в процессе решения абсолютная величина небаланса (невязки) решаемого уравнения t ( t )f ( t ) jK(t ,г) (T)dt на выходе сумматора I оказывается больше S| то коммутатор 4 замыкает цепь и выход второго функционального преобразователя 3 соединения со входом интегратора 5. Ц)и этом (в связи с тем, что схема устойчива) рассогласование отрабатывается с малой постоянной временя, определяемой величиной коэф(}шшента Г в уравнении (3), и велич1ьна навязки на выходе блока 1 уменьшается. Как только невязка становится меньше , коммутатор 4 размыкает цепь, при этом вход интегратора 5 .замыкается на землю, и напряжение на его выходе фиксируется. Таким образом, в процессе решения интегрального уравнения коммутатор 4 то соединяет вход интегратора 5 с выходом преобразователя 3 (если невязка больше б ), то замыкает его на землю (если невязка мааьше d ). При этом весь участок решения разбивается на ряд интервалов в общем случае неравной длительности с постоянным значением решения на каждом интервале, т.е. решение получается в шае кусочно-ttooгоянной функции времени. Сигнал ошибки на выхоае сумматора в процессе решения все время близок к нулю. При отсутствии шумов во входном сиг нале с О коммутатор 4 все время находится в замкнутом состоянии, усгройст во моцелирует уравнение (3), и при (Р) I на его выхоае образуется решение интегрального уравнения Вольтерра. первого роца (если Г аостаjro4Ho мало). .. При наличии шума во входном сигна- ле не имеет смысла на выхоае первого функционального преобразователя 2 огслеживать этот сигнал с точностью, превышающей аисперсию шума, так как иначе этот шум (вследствие некорректности решаемой задачи) будет усиливаться и может полностью по давить-точное решение задачи. Поэтому устройство работает так, чтобы иевязка на выхоае сумматора I не превышала величины - дисперсии ма входного скгаала , Иначе гсжоря, сигнал на выходе {феобразователя 2 (на выходе следящей системы) отличается от входного сигнала не более/чек на величину , т.е. эти сигналы совпадают с точностью задания исходных данных. При этом решение линейного интегрального уравнения Вольтерра первого роца на выходе интегратора 5 является устойчивым и приближенным, не содержит, значительной высокочастотной шумшой составляющей. Таким образом, устройство для модели рования линейных интегральных уравнений позволяет получить на выходе устойчнвое I приближенное решение при наличии зашум ленного сигнала на входе. Формула изобретения Устройство для решения линейтгых интегральных уравнений, содержащее сумматор, первый вход которого 5юляется входом устройства, и первый функциональный преобразователь, выход соединен со вторым входом сумматора, отличающееся тем, что с целью повышения устойчивости и точности, в него дополнительно введены второй функциональный преобразователь, коммутатор, интегратор, блок определения дисперсии шума и коммутатор, причем выход сумм тора соединш с входом второго 4(Увкцис нального преобразователя, выход которого через коммутатор соедини с входом интегратора, выход которого является Bbixt дом устройства и соединен с входом первого функционального преобразовател51, вьг ход сумматора соединен с первым входом коммутатора, второй вход которого попключен к выходу блока о сфеделения дисперсии шума, вход которого связан с входом сумматора, а выход коммутатора соединз с управляющим входом коммутатора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке М« 2601768/18-24. кл. G Об а 7/36, 1978. 2.Авторское свидетельство СССР N 188163, G 06 G 7/38, 1966 (прототип).
Чь
оЧ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения линейных интегральных уравнений (его варианты) | 1985 |
|
SU1278899A2 |
| Устройство для решения интегральных уравнений | 1982 |
|
SU1092530A1 |
| АНАЛОГО-ДИСКРЕТНАЯ МОДЕЛЬ ДЛЯ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ | 1966 |
|
SU188163A1 |
| Устройство для решения интегральных уравнений Вольтерра первого рода | 1989 |
|
SU1725236A1 |
| Устройство для решения линейных интегральных уравнений Вольтерры | 1983 |
|
SU1124322A1 |
| Регуляризованный фильтр Калмана | 1985 |
|
SU1317652A1 |
| Генератор случайных процессов | 1983 |
|
SU1141409A1 |
| Устройство для решения интегральных уравнений Вольтерра первого рода | 1988 |
|
SU1585807A1 |
| Регуляризованный фильтр Калмана | 1989 |
|
SU1651355A1 |
| Дифференцирующее устройство | 1983 |
|
SU1101845A1 |
I
