Изобретение относится к робототехнике и касается такого робота, который может эффективно работать в условиях строго ограниченной площади
Цель изобретения - повышение компактности конструкции при сохран,ении зоны обслуживания.
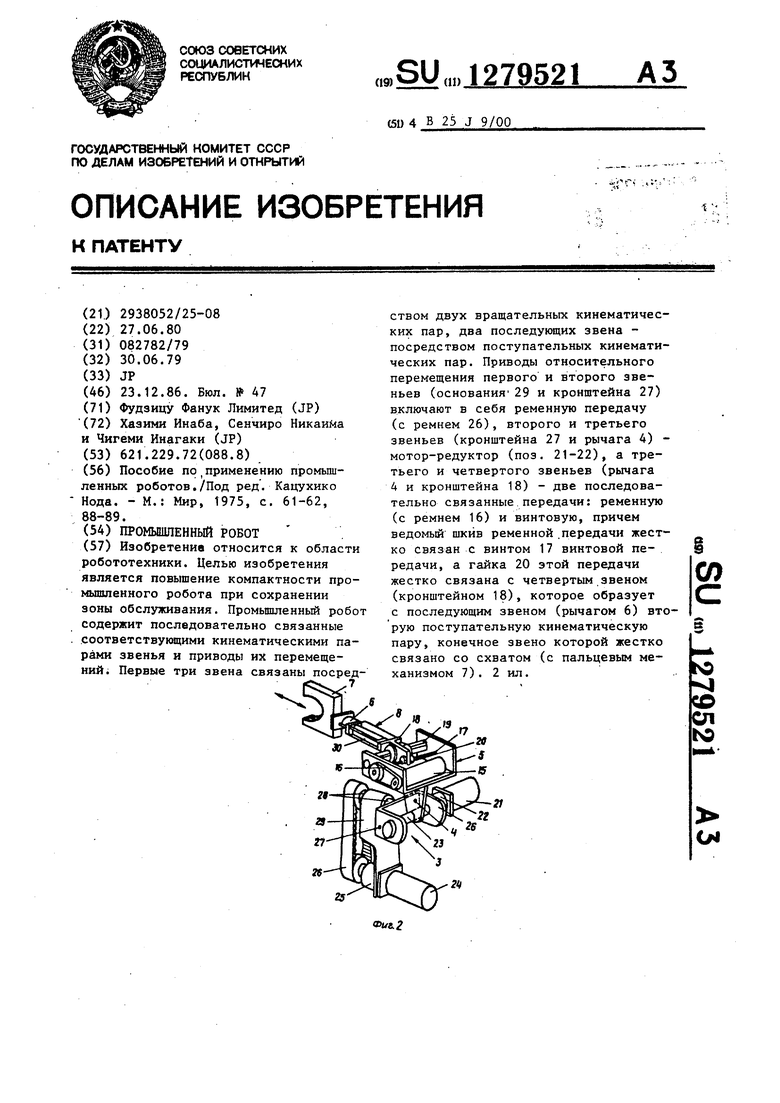
На фиг. 1 изображен внешний вид робота; на фиг. 2 - внутреннее устройство механизма руки робота.
Промышленный робот содержит первьй механизм 1 вращения, который крепится одним концом к основанию 2, второй механизм 3 вращения, соединенный с рычагом 4. Конфигурация рычага 4 такова, что он несколько выступает от второго механизма 3 вращения в положительном направлении оси Х, затем изгибается на небольшое расстояние в положительном направлении оси Z, а основная его длина расположена в положительном направлении оси У, причем этот конец рычага соединен с подвижным в поперечном направлении элементом 5. Подвижный в, поперечном направлении элемент 5 посредством рычага 6 соединяется с пальцевым механизмом 7. Между рычагом 6 и подвижным в поперечном нап.равлёнии элементом 5 расположен удлиняемый вал 8, что позволяет паль-цевому механизму 7 перемещаться вдоль рычага 6. Кроме того, на фиг.1 обозначены металлорежущий станок 9, патрон 10 металлорежущего станка, устройство 11 для подачи обрабатываемой детали и обрабатываемая деталь 1 2.
Робот работает следующим образом. Вначале приводится в действие подвижньй в поперечном направлении элемент 5, которьй приближает пальцевый механизм 7 к патрону 10 так, чтобы этот механизм мог захватить обработанную деталь, закрепленную в патроне. Затем подвижньй в поперечном направлении элемент 5 перемещается в противоположном направлении для извлечения обработанной детал{1 из патрона. ПОсле этого приводится в действие второй механизм 3 вращения для поворота пальцевого механизма 7 и установки его в плоскость, параллельную плоскости X-Z, и перемещения пальцевого механизма 7 в положение 13. Вслед за этим приводится в действие первый механизм 1 вращения для установки пальцевого механизма 7 в плоскости, параллельной плоскости , и перемещения пальцевого элемента и положение 14, после чего приводится в действие удлиняемьй вал 8 для увеличения длины рычага 6. Посредством этой операции пальцевый механизм 7, которьй все еще удерживает деталь, размещается над устройством 11 для подачи деталей, в результате чего деталь 12 может быть помещена в это устройство, если пальцевый механизм 7 ослабит усилие захвата. Установка в патрон необработанной детали может
быть выполнена механизмом путем повторения указанных операций в обратной последовательности.
Подвижньй в поперечном направле.нии элемент 5 содержит двигатель 15,
распределительный ремень 1Ь, шарикоподшипниковый ходовой винт 17, кронщтейн 18 и шарикоподшипниковый шлиц 19. Двигатель 15 приводит во враще. ние ходовой винт через распределительньй ремень 16. Кронштейн 18, служащий для размещения пальцевого механизма 7, установлен на шарикоподшипниковом шлице 19 и зафиксирован для предотвращения поворота. К кронштейну 18 неподвижно крепится гайка 20, которая навинчивается на ходовой винт 17. Для перемещения Кронштейна 18 приводится во вращение от двигателя 15 через распределительный ремень 16 ходовой винт 17. По мере вращения ходового винта 17 гайка 20 перемещается вдоль него, что приво,дит к перемещению вдоль шарикоподшипникового шлица 19 кронштейна 18.
Второй механизм 3 вращения содержит двигатель 21, редуктор 22 и вал 23, соединенный с редуктором. Во время работы двигателя 12 через редуктор 22 приводится.во вращение вал 23i
поворачивающий подвижньй в поперечном направлении элемент 5, который соединен с валом 23 посредством рычага 4.
Первый механизм 1 вращения состоит из двигателя 24, редуктора 25, распределительного ремня 26, кронштейна 27 для удерживания в осевом направлении второго механизма 3 вра-
щения и поворотного вала 28, соединенного с кронштейном 27. Двигатель 24 неподвижно крепится к основанию 29. Во время работы двигателя 24 через редуктор 25 и распределитель

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1981 |
|
SU1149860A3 |
| Управляемая рука промышленного робота | 1981 |
|
SU1087060A3 |
| Промышленный робот | 1982 |
|
SU1087061A3 |
| Кисть промышленного робота | 1982 |
|
SU1168090A3 |
| Промышленный робот | 1982 |
|
SU1331420A3 |
| Устройство для последовательной подачи заготовок к схвату робота | 1982 |
|
SU1299490A3 |
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU727119A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Устройство для останова шпинделя в заданном положении | 1980 |
|
SU1165226A3 |
| Пособие по применению промьшленных роботов,/Под ред | |||
| Кацухико Нода | |||
| - М.: Мир, 1975, с | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
