Изобретение относится к автоматизации технологического оборудова- ния и может быть использовано для по- следовательной подачи заготовок к охвату робота.
Цель изобретения - повьппение точности подачи путем исключения перекоса стопы заготовок при перемещении ее с поддона к охвату робота.
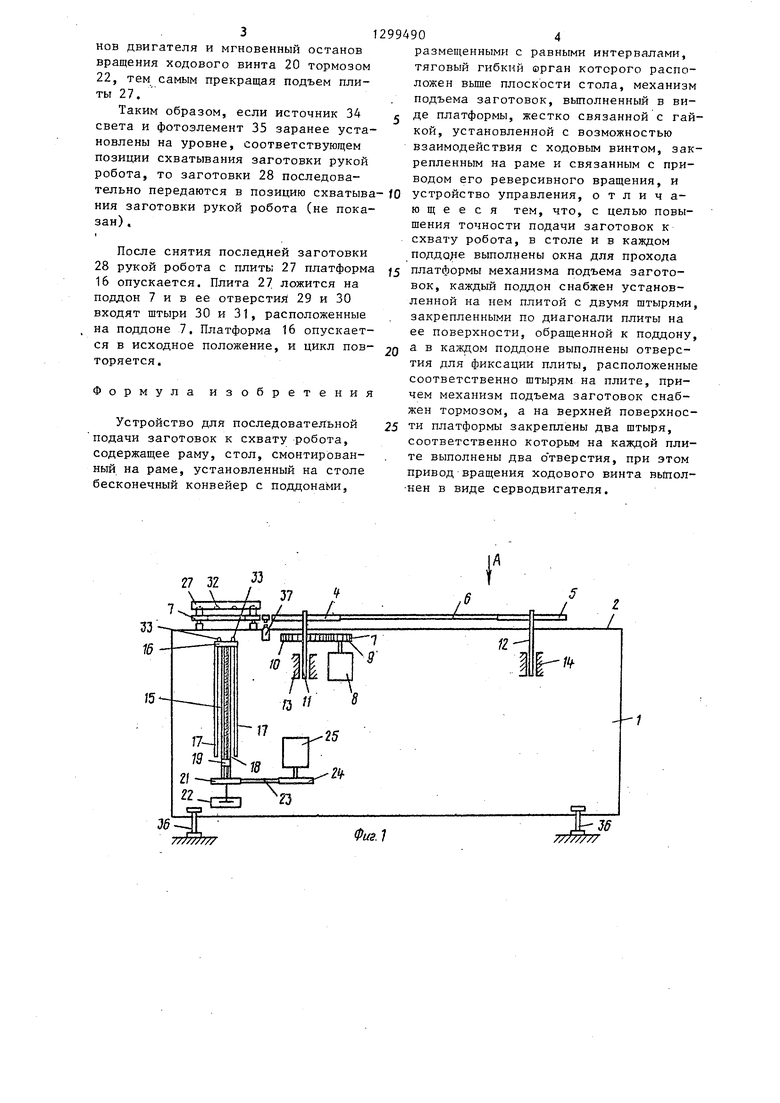
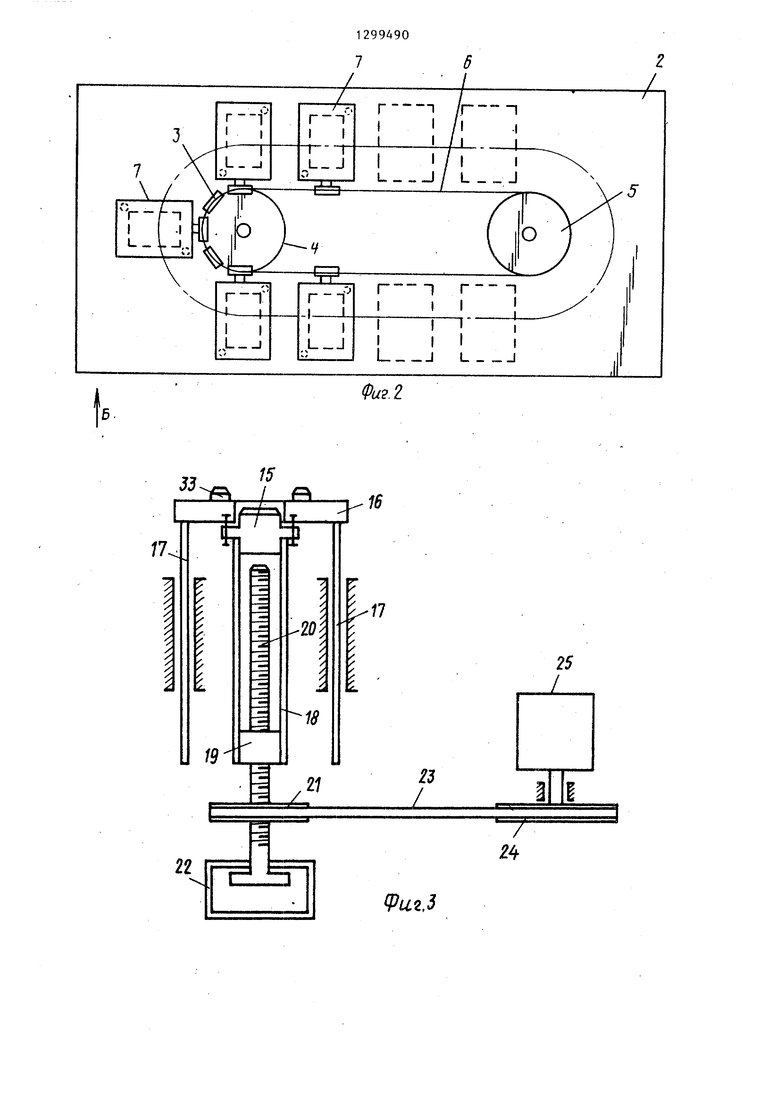
На фиг. 1 изображено устройство для последовательной подачи заготовок к охвату робота, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг.З - механизм подъема заготовок к охвату робота.; на фиг. 4 - плита; на фиг.5- подцон; на фиг. 6 - вид Б на фиг.2.
Устройотво для последовательной подачи заготовок оодержит раму 1, на которой закреплен стол 2, На отоле 2 смонтирован горизонтально замкнутый конвейер 3, огибающий звездочки 4 и
5,закрепленные, с. возможностью вращения на столе 2. Тяговый гибкий орган конвейера вьтолнен в виде цепи
6.На цепи 6 кбнвейера 3 с равномерным шагом друг от друга консольно смонтированы поддоны 7.
Горизонтально замкнутый конвейер 3 приводится в движение злектродвига- телем 8 через зубчатые колеса 9 и 10, причем последние омонтированы на валу 11 звездочки 4.Звездочка,5 омон- тирована на валу 12. Валы 11 и 12 звездочек 4 и 5 установлены в раме 1 в подшипниковых узлах ооответотвен- но 13 и 14. В раме 1 под столом 2 установлен механизм 15 подъема заготовок, содержащий платформу 16 с направляющими стержнями 17, закрепленными с нижней стороны платформы 16 и служащими для предотвращения вращения платформы 16 при ее подъеме и опускании.
По центру платформы 16 установлен корпус 18, выполненный в виде цилиндра. На нижнем конце корпуса 18 закреплена гайка 19. Ходовой винт 20, ввернутый в гайку 19, проходит вертикально через корпус 18. Звездочка 21 смонтирована на нижней части 50 проходит через окно 38 в столе 2 и ходового винта 20. Нижний конец ходо- окно 26 в поддоне 7, и штыри 33 плат- 20 соединен с тормозом
вого винта 20 соединен с 22. Ходовой винт 20 имеет опоры для осуществления вращения, звездочка 21 огибается цепью 23. Последняя огибает и звездочку 24, одетую на вал серводвигателя 25. В каждом поддоне 7 выполнено окно 26 для прохода- через него платформы 16 механизма 15 подъеформы 16 входят в отверстия 32, выполненные в нижней плоскости плиты 27.
55 Когда верхние поверхности уложенных заготовок 28 достигают уровня светового источника 34 и фотоэлемента 35, световой луч между этими двумя частями прерывается, вызывая остама заготовок. На каждом поддоне свободно уотановлена плита 27, предназначенная для укладки на них заготовок -28. С нияшей плоскости плиты 27, обращенной к поддону 7, по диагонали выполнены отверстия 29 и 30. На поддоне 7 по диагонали расположены штыри 31 соответственно отверстиям 29 и 30.
В центре нижней плоскости плиты 27 выполнены два отверстия 32, а на платформе 16 механизма 15 подъема установлены штыри 33, расположенные соответственно отверотиям 32. На уровне соответствующей позиции схватывания заготовки 28 рукой робота установлен источник 34 света и фото- злемент 35.
Источник 34 света и фотоэлемент 35, т.е. фотодатчик, не являются отдельно присоединяемыми блоками, а могут присоединятьо.я к руке робота не- посредственно.
Рама 1 установлена на опорных ножках 36, а на столе 2 смонтирХ)ван конечный выключатель 37, который определяет позицию остановки поддона 7,.
В отоле 2 выполнено окно 38 для прохода механизма 15 подъема. Устройство работает следующим образом.
. Цепь 6 горизонтально замкнутого конвейера 3 с закрепленными на ней
пордонами 7 приводится в движение электродвигателем 8 и останавливается в заданной позиции в результате срабатывания конечного выключателя 37, задающего положение поддона 7. Затем включается серводвигатель 25 механизма 15 подъема. Вращение серводвигателя 25 передается на ходовой винт 20 через звездочки 24 и 21, огибаемые цепью 23. Поворот ходового винта 20 приводит к подъему гайки 19j навернутой на ходовой винт 20. Корпус 18, на нижнем конце которого смонтирована гайка 19, таким образом тоже поднимается вместе с платформой 16. В результате платформа 16
50 проходит через окно 38 в столе 2 и окно 26 в поддоне 7, и штыри 33 плат-
формы 16 входят в отверстия 32, выполненные в нижней плоскости плиты 27.
55 Когда верхние поверхности уложенных заготовок 28 достигают уровня светового источника 34 и фотоэлемента 35, световой луч между этими двумя частями прерывается, вызывая оста3
нов двигателя и мгновенный останов вращения ходового винта 20 тормозом 22, тем самым прекращая подъем плиты 27.
Таким образом, если источник 34 света и фотоэлемент 35 заранее установлены на уровне, соответствующем позиции схватывания заготовки рукой робота, то заготовки 28 последовательно передаются в позицию схватыва ния заготовки рукой робота (не показан) .
После снятия последней заготовки 28 рукой робота с плиты 27 платформа 16 опускается. Плита 27 ложится на поддон 7 и в ее отверстия 29 и 30 входят штыри 30 и 31, расположенные на поддоне 7, Платформа 16 опускается в исходное положение, и цикл повторяется.
Формула изобретения
Устройство для последовательной подачи заготовок к схвату робота, содержащее раму, стол, смонтированный на раме, установленный на столе бесконечный конвейер с поддонами.
33
16
15994904
размещенными с равными интервалами, тяговый гибкий орган которого расположен вьщ1е плоскости стола, механизм подъема заготовок, выполненный в ви- е де платформы, жестко связанной с гайкой, установленной с возможностью взаимодействия с ходовым винтом, закрепленным на раме и связанным с приводом его реверсивного вращения, и
to устройство управления, отличающееся тем, что, с целью повышения точности подачи заготовок к схвату робота, в столе и в каждом поддо 1е выполнены окна для прохода }5 платформы механизма подъема заготовок, каждый поддон снабжен установленной на нем плитой с двумя штырями, закрепленными по диагонали плиты на ее поверхности, обращенной к поддону, а в каждом поддоне выполнены отверстия для фиксации плиты, расположенные соответственно штырям на плите, причем механизм подъема заготовок снабжен тормозом, а на верхней поверхнос- 25 ти платформы закреплены два штыря, соответственно которым на каждой плите выполнены два о тверстия, при этом привод вращения ходового винта выпол- нен в виде серводвигателя.
20
z
7
ГТ
S
1 I
JJ
/5 /Q
1
22
fe.2
Z
fPu2,3
Фиг.
Редактор О. Бугир
Составитель И. Щивьев
Техред Л. Сердюков а Корректор А. Обручар
Заказ 904/63 Тираж 787 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
VtiZ.5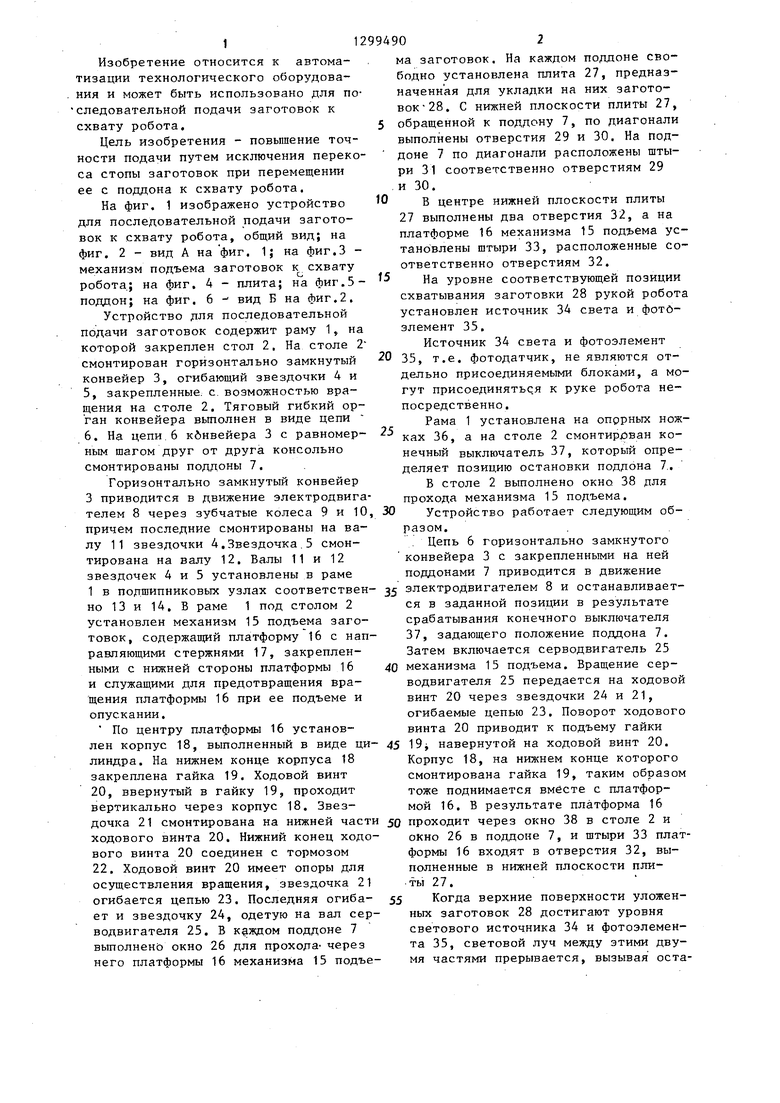
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1981 |
|
SU1149860A3 |
| Кисть механической руки | 1982 |
|
SU1179913A3 |
| Кисть промышленного робота | 1982 |
|
SU1168090A3 |
| Промышленный робот | 1982 |
|
SU1331420A3 |
| Промышленный робот | 1980 |
|
SU1279521A3 |
| Управляемая рука промышленного робота | 1981 |
|
SU1087060A3 |
| УСТРОЙСТВО ДЛЯ ПОСЛЕДОВАТЕЛЬНОЙ ПОДАЧИ ЗАГОТОВОК К СХВАТУ РОБОТА | 1998 |
|
RU2145274C1 |
| Промышленный робот | 1982 |
|
SU1087061A3 |
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Автоматическое устройство (его варианты) | 1979 |
|
SU1165227A3 |
Изобретение относится к автоматической загрузке технологического оборудования штучными заготовками. Целью изобретения является повьшение точности подачи заготовок к схвату 34 7-н и ОЙ а. ие 28 робота. Для этого заготовки 28 укладываются стопками на плиты 27, фик сируемые относительно поддонов 7 горизонтально замкнутого конвейера посредством штырей 33 на поддоне 7 и соответствующих отверстий на плитах. При перемещении вверх .платформы 16 механизма подъема заготовок 28 посредством привода, выполненного в виде гайки 19, жестко связанной с платформой и взаимодействующей с ходовым винтом 20, кинематически связанным через цепную передачу 23 с серводвигателем 25, платформа 16 стыкуется с . плито} 27 и поднимает стопку заготовок 28 на плите 27 до уровня источника 34 света и фотоэлемента 35 для захвата верхней заготовки 28 в стопке схватом робота. 6 ил. Biuj Б J § СО -13 -аС 33 П О го ,гу CN 36 Фчй.6
| Автоматическая переналаживаемая ли-Ния | 1979 |
|
SU837771A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
