Од СХ) . Изобретение относится к промышленному роботу, конкретно к кисти промышленного робота для улучшения захватывающей функции руки. Известна кисть промышленного робота, содержащая основание, соединенное с подвижным запястьем, плиту, имеющую ладонную поверхност две пары схватывающих пальцев, подвижно установленных на ладонной поверхности плиты, причем схйатьша щие пальцы каждой пары расположены симмёП-рично друг другу относительно центра ладонной поверхности и с возможностью перемещения по направлению друг к другу для смыкания при захвате изделия или их разведения при отпускании изделия, причем направление смыкание и разведения пальцев одной пары перпендикулярно направлению смыкания и разведения пальцев другой пары lj, Недостатком известной кисти является низкая надежность при удержании изделия большой массы и неправильной формы. Цель изобретения т повышение надежности при удержания изделия большой массы и неправильной формы Поставленная цель достигается тем, что в кисти промышленного робота, содержащей основание, соединенное с подвижным запястьем, плит имеющую ладонную поверхность, две пары схватывающих пальцев, подвижно установленных на лодонной поверхности плиты таким образом, что схватывающие пальцы к 1ждой пары расположены симметрично друг другу относительно центра ладонной поверхности и с возможностью перемещения По направлению друг к другу или друг от друга при смыкании или разведении пальцев во взаимно перпендикулярных направлениях, один и схватьтающих пальцев в каждой паре жестко связан со штоком независимого 1 азового цилиндра, установлен ного параллельно оси перемещения схватывающих пальцев в этой паре, другой соединен с первым схватываю щим пальцем посредством дополнител но введенного шатуна. На фиг. 1 показан промышленный робот (перспективный вид), снабжен ный рукой робота, имеющей кисть, соответствующую одному из варианто исполнения изобретения; на фиг. 2 кисть промышленного робота в аксонометрии, на фиг. 3 - схема устройства для приведения в действие кисти; на фиг. 4 - кисть промьш ленного робота, вариант исполнения} на фиг. 5 - временная схема сигналов, подаваемых регулирующим устройством, когда захватывающие пальцы открываются и закрываются. Проньшшенный робот (фиг. 1) имеет неподвижную опору 1, поворотную плиту 2, устаноапенную на неподвижной опоре таким образом, что она может вращаться в.прямом и обратном направлениях, два вертикальных направляющих вала 3 (фиг. 1 показан один вал 3). Валы 3 устанавливаются на поворотной плите 2 для обеспечения подвижности коробки 4 робота в вертикальном направлении. Вертикальный подающий ходовой винт 5 устанавливается параллельно вертикальным направляющим валам 3 и вводится в резьбовое соединение с коробкой 4 робота так, что коробка вертикально перемещается вдоль направляющих валов 3 в соответствии с вращением вертикального подающего ходового винта 5. Коробка 4 робота поддерживает рычаги 6 и 7 робота так, что они вытягиваются и втягиваются в осевом направлении, а рука 8 робота крепится к концам . рычагов 6 и 7 робота через цапфовый механизм 9. Рука 8 имеет плиту 10 с ладонной поверхностью 11, а противоположная поверхность плиты 10 назьшается тыльной поверхностью 12. Схватывающне пальцы 13 устанавливаются так, что они вытянуты в направлении, перпендикулярном ладонной поверхности опорной плиты 10 руки 8, образуют две пары, установленные симметрично одна другой относительно центра ладонной поверхности. Эти пальцы перемещаются по направлению к центру ладонной поверхности синхронно друг с другом для осуществления операции смыкания пальцев при захвате изделия или их разведения один или другого для раскрытия пальцев при отпускании изделия. При этом пальцы подходят под обрабатываемое изделие. Вторая пара пальцев устроена так же,, как и первая, за исключением того, что их направление открывания и закрывания пересекает
3
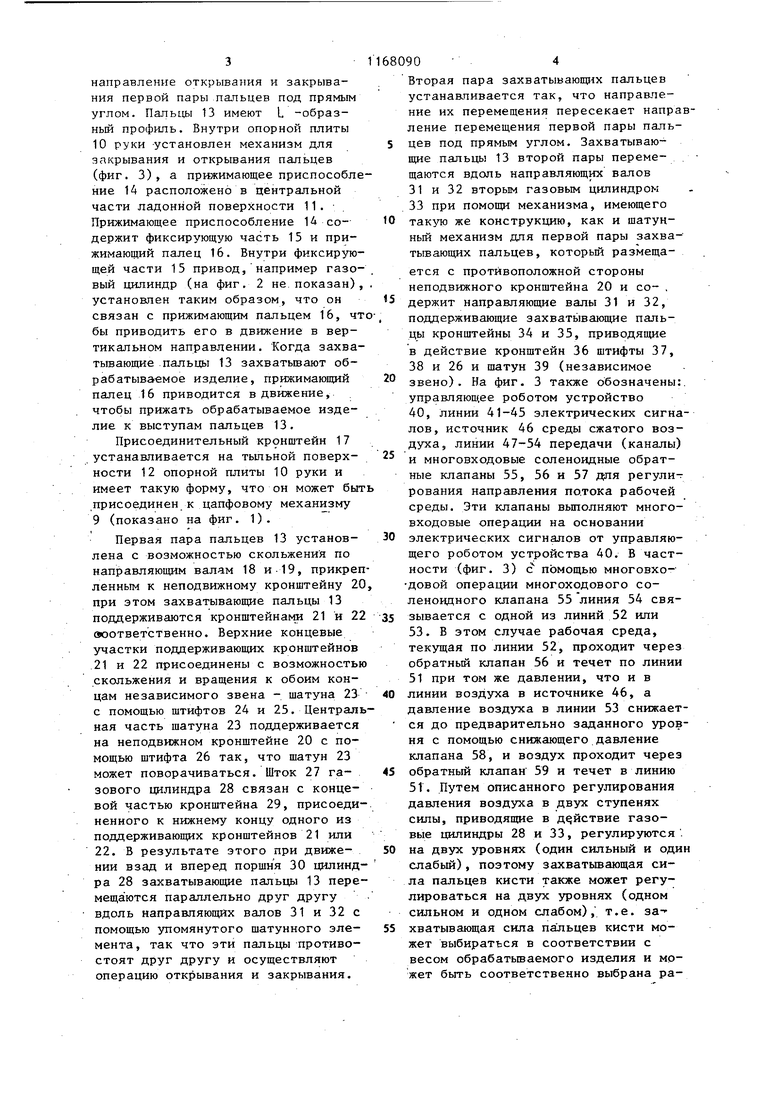
направление открывания и закрывания первой пары пальцев под прямым углом. Пaлы)I 13 имеют L -образный профиль. Внутри опорной плиты 10 руки установлен механизм для закрывания и открывания пальцев (фиг. 3), а прижимающее приспособление 14 расположено в центральной части ладонной поверхности 11. Прижимающее приспособление 14 содержит фиксирующую часть 15 и прижимающий палец 16. Внутри фиксирующей части 15 привод, например газовый цилиндр (на фиг. 2 не показан), установлен таким образом, что он связан с прижимающим пальцем 16, чтбы приводить его в движение в вертикальном направлении. Когда захватывающие пальцы 13 захватьшают обрабатываемое изделие, прижимающий палец 16 приводится в движение, чтобы прижать обрабатываемое изделие к выступам пальцев 13.
Присоединительный кронштейн 17 устанавливается на тьтьной поверхности 12 опорной плиты 10 руки и имеет такую форму, что он может быт .присоединен к цапфовому механизму 9 (показано на фиг. 1).
Первая пара пальцев 13 установлена с возможностью скольжений по направляющим валам 18 и-19, прикрепленным к неподвижному кронштейну 20 при этом захватывающие пальцы 13 поддерживаются кронштейнами 21 и 22 аоответственно. Верхние концевые участки поддерживающих кронштейнов 21 и 22 присоединены с возможностью скольжения и вращения к обоим концам независимого звена - шатуна 23 с помощью штифтов 24 и 25. Центральная часть щатуна 23 поддерживается на неподвижном кронштейне 20 с помощью щтифта 26 так, что шатун 23 может поворачиваться. Шток 27 газового цилиндра 28 связан с концевой частью кронштейна 29, присоединенного к нижнему концу одного из поддерживающих кронштейнов 21 или 22. В результате этого при движении взад и вперед поршня 30 цилиндра 28 захватывающие пальцы 13 перемещаются параллельно друг другу вдоль направляющих валов 31 и 32 с помощью упомянутого шатунного элемента, так что эти пальцы противостоят друг другу и осуществляют операцию открывания и закрывания.
68090 4
Вторая пара захватывающих пальцев устанавливается так, что направление их перемещения пересекает направление перемещения первой пары пальцев под прямым углом. Захватывающие пальцы 13 второй пары перемещаются вдоль направляющих валов 31 и 32 вторым газовьм цилиндром 33 при помощи механизма, имеющего 10 так-то же конструкцию, как и шатунный механизм для первой пары захватывающих пальцев, который размещается с противоположной стороны неподвижного кронштейна 20 и со- , 5 держит направляющие валы 31 и 32,
поддерживающие захватывающие пальцы кронштейны 34 и 35, приводящие в действие кронштейн 36 штифты 37, 38 и 26 и шатун 39 (независимое
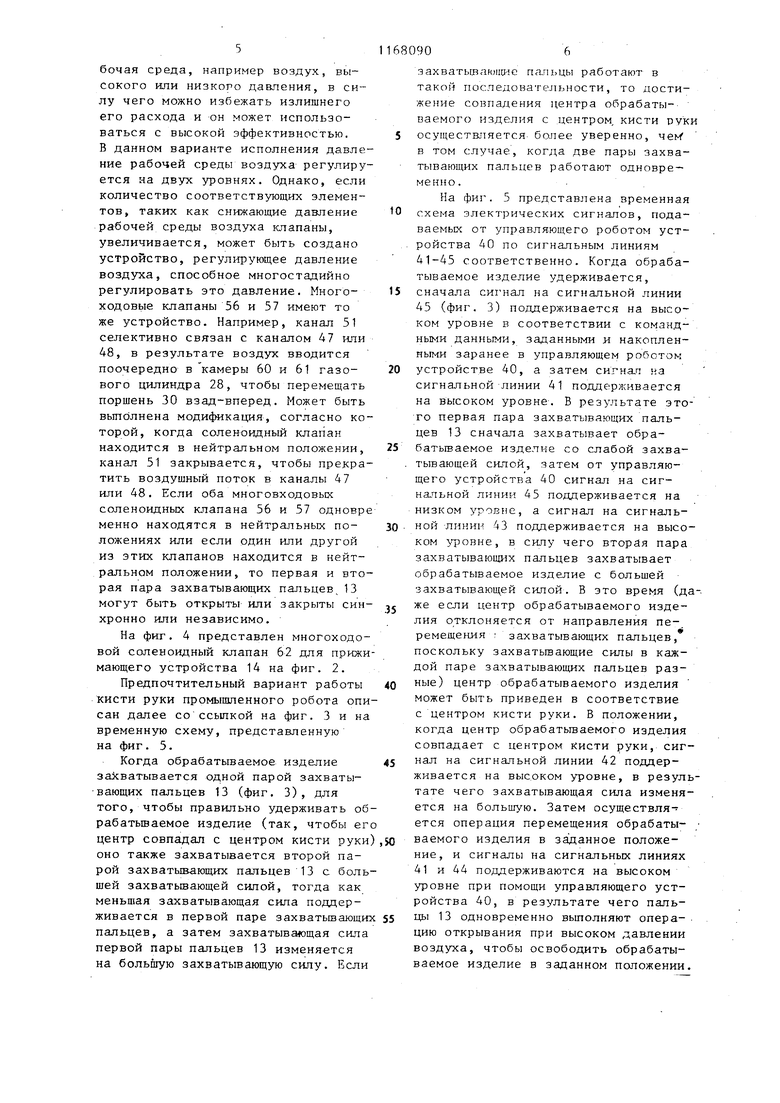
звено). На фиг. 3 также обозначены:, управляющее роботом устройство 40, линии 41-45 электрических сигналов, источник 46 среды сжатого воздуха, линии 47-54 передачи (каналы)
5 , и многовходовые соленоидные обратные клапаны 55, 56 и 57 для регулирования направления потока рабочей среды. Эти клапаны выполняют многовходовые операции на основании
0 электрических сигналов от управляющего роботом устройства 40. В частности (фиг. 3) с помощью многовходовой операции многоходового соленоидного клапана 55 линия 54 связывается с одной из линий 52 или 53. В этом случае рабочая среда, текущая по линии 52, проходит через обратный клапан 56 и течет по линии 51 при том же давлении, что и в
0 ЛИНИИ воздуха в источнике 46, а
давление воздуха в линии 53 снижается до предварительно заданного уровня с помощью снижающего давление клапана 58, и воздух проходит через
S обратный клапан 59 и течет в линию 51. Путем описанного регулирования давления воздуха в двух ступенях силы, приводящие в действие газовые цилиндры 28 и 33, регулируются.
0 на двух уровнях (один сильный и один слабый), поэтому захватывающая сила пальцев кисти также может регулироваться на двух уровнях (одном сильном и одном слабом), т.е. за-
5 хватывающая сила пальцев кисти может выбираться в соответствии с весом обрабатьшаемого изделия и мржет быть соответственно выбрана ра5
бочая среда, например воздух, высокого или низкого давления, в силу чего можно избежать излишнего его расхода и он может использоваться с высокой эффективностью. В данном варианте исполнения давление рабочей среды воздуха регулируется на двух уровнях. Однако, если количество соответствующих элементов, таких как снижающие давление рабочей среды воздуха клапаны, увеличивается, может быть создано устройство, регулирующее давление воздуха, способное многостадийно регулировать это давление. Многоходовые клапаны 56 и 57 имеют то же устройство. Например, канал 51 селективно связан с каналом 47 или 48, в результате воздух вводится поочередно в камеры 60 и 61 газового цилиндра 28, чтобы перемещать поршень 30 взад-вперед. Может быть выполнена модификация, согласно которой, когда соленоидный клапан находится в нейтральном положении, канал 51 закрывается, чтобы прекратить воздушный поток в каналы 47 или 48. Если оба многовходовых соленоидных клапана 56 и 57 одновре менно находятся в нейтральных положениях или если один или другой из этих клапанов находится в нейтральном положении, то первая и вторая пара захватывающих пальцев 13 могут быть открыты или закрыты синхронно или независимо.
На фиг. 4 представлен многоходовой соленоидный клапан 62 для прижимающего устройства 14 на фиг. 2.
Предпочтительный вариант работы кисти руки промышленного робота описан далее соссылкой на фиг. 3 и на временную схему, представленную на фиг. 5.
Когда обрабатываемое изделие захватывается одной парой захватывающих пальцев 13 (фиг. 3), для того, чтобы правильно удерживать обрабатьшаемое изделие (так, чтобы ег центр совпадал с центром кисти руки оно также захватывается второй парой захватывающих пальцев 13 с большей захватьшающей силой, тогда как меньшая захватывающая сила поддерживается в первой паре захватьшающи пальцев, а затем захватывающая сила первой пары пальцев 13 изменяется на больгоую захватывающую силу. Если
0906
захватьшлклцис пальцы работают в такой последовательности, то достижение совпадения центра обрабатываемого изделия с центром, кисти руки осуществляется более уверенно, 4eNf в том случае, когда две пары захватывающих пальцев работают одновременно.
На фиг. 5 представлена временная
схема электрических сигналов, подаваемых от управляющего роботом устройства 40 по сигнальным линиям 41-45 соответственно. Когда обрабатываемое изделие удерживается,
сначала ситнал на сигнальной линии 45 (фиг. 3) поддерживается на высоком уровне в соответствии с командными данными, заданными и накопленными заранее в управляющем роботом
устройстве 40, а затем сигна.а на сигнальной линии 41 поддерживается на высоком уровне. В результате этого первая пара захватывающих пальцев 13 сначала захватывает обрабатываемое изделие со слабой захватывающей силой, затем от управляющего устройства 40 сигнал на сигнальной линии 45 поддерживается на низком уровне, а сигнал на сигнапьной линин 43 поддерживается на высоком ypojiHe, в силу чего вторая пара захватывающих пальцев захватывает обрабатываемое изделие с большей захватывающей силой. В это время (даже если центр обрабатываемого изделия отклоняется от направления перемещения захватывающих пальцев, поскольку захватьшающие силы в каждой паре захватывающих пальцев разные) центр обрабатываемого изделия может быть приведен в соответствие с центром кисти руки. В положении, когда центр обрабатьшаемого изделия совпадает с центром Кисти руки, сигнал на сигнальной линии 42 поддерживается на высоком уровне, в результате чего захватывающая сила изменяется на большую. Затем осуществляется операция перемещения обрабаты-
ваемого изделия в заданное положение, и сигналы на сигнальных линиях 41 и 44 поддерживаются на высоком уровне при помощи управляющего устройства 40, в результате чего пальцы 13 одновременно выполняют операцию открывания при высоком давлении воздуха, чтобы освободить обрабатываемое изделие в заданном положении.
12
10
73
/4
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемая рука промышленного робота | 1981 |
|
SU1087060A3 |
| Кисть механической руки | 1982 |
|
SU1179913A3 |
| Промышленный робот | 1982 |
|
SU1331420A3 |
| Промышленный робот | 1981 |
|
SU1149860A3 |
| Устройство для последовательной подачи заготовок к схвату робота | 1982 |
|
SU1299490A3 |
| Промышленный робот | 1982 |
|
SU1087061A3 |
| Автоматическое устройство (его варианты) | 1979 |
|
SU1165227A3 |
| Промышленный робот | 1980 |
|
SU1279521A3 |
| Узел манипулятора | 1982 |
|
SU1138010A3 |
| Кисть манипулятора со стыковочным устройством | 1982 |
|
SU1304742A3 |




КИСТЬПРОМЬШШЕННОГО РОБОТА для схвата изделия, содержащая основание, соединенное с подвижным запястьем, плиту, имекицую ладонную поверхность, две пары схватьтающих пальцев, подвижно установленных на ладонной поверхности плиты таким образом, что схватывающие пальцы каждой пары расположены симметрично друг другу относительно центра ладонной поверхности и с возможностью перемещения по направлению друг к другу при сьрлкании и разведении пальцев одной пары, отличающаяся тем, что, с целью повьшения надежности при удержании изделия большой массы и неправильной формы, один из схватьтающих пальцев в каждой паре жестко связан со штоком независимого газового цилиндра, установлен(Л ного параллельно оси перемещения схватывающих пальцев в этой паре, а другой соединен с первым схватывающим пальцем посредством допол,нительно введенного шатуна.
4/
Фиг 5
4/
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
