:
со
00 О5
caj
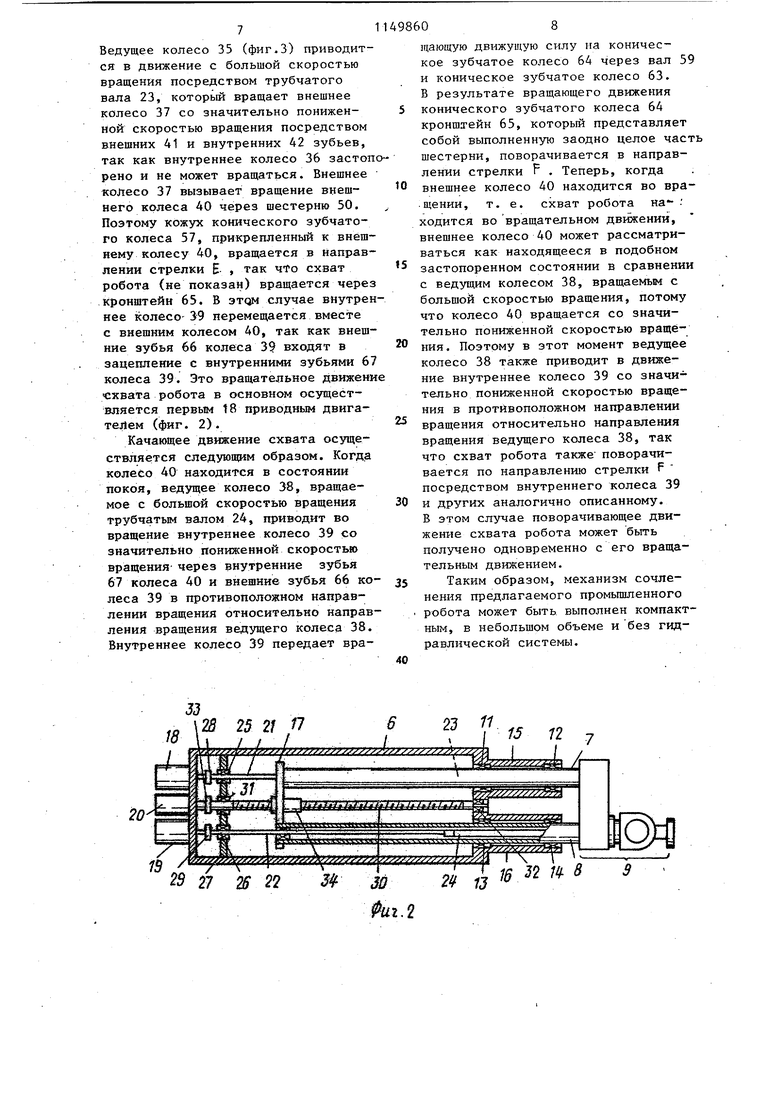
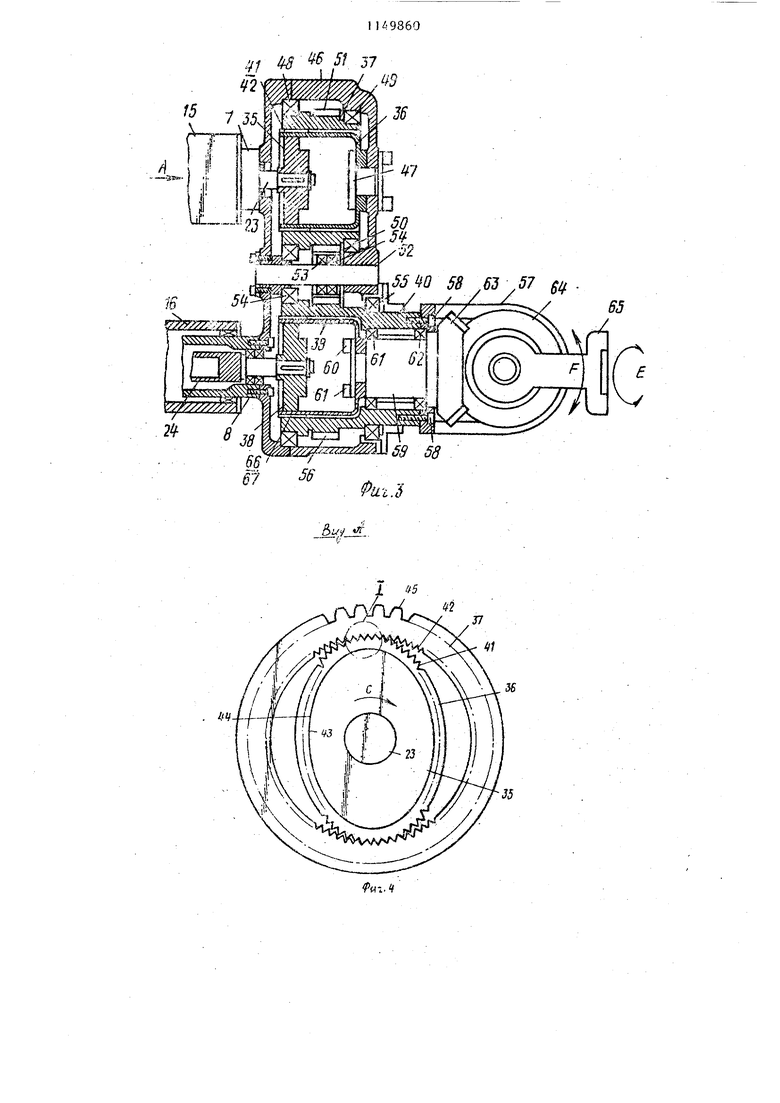
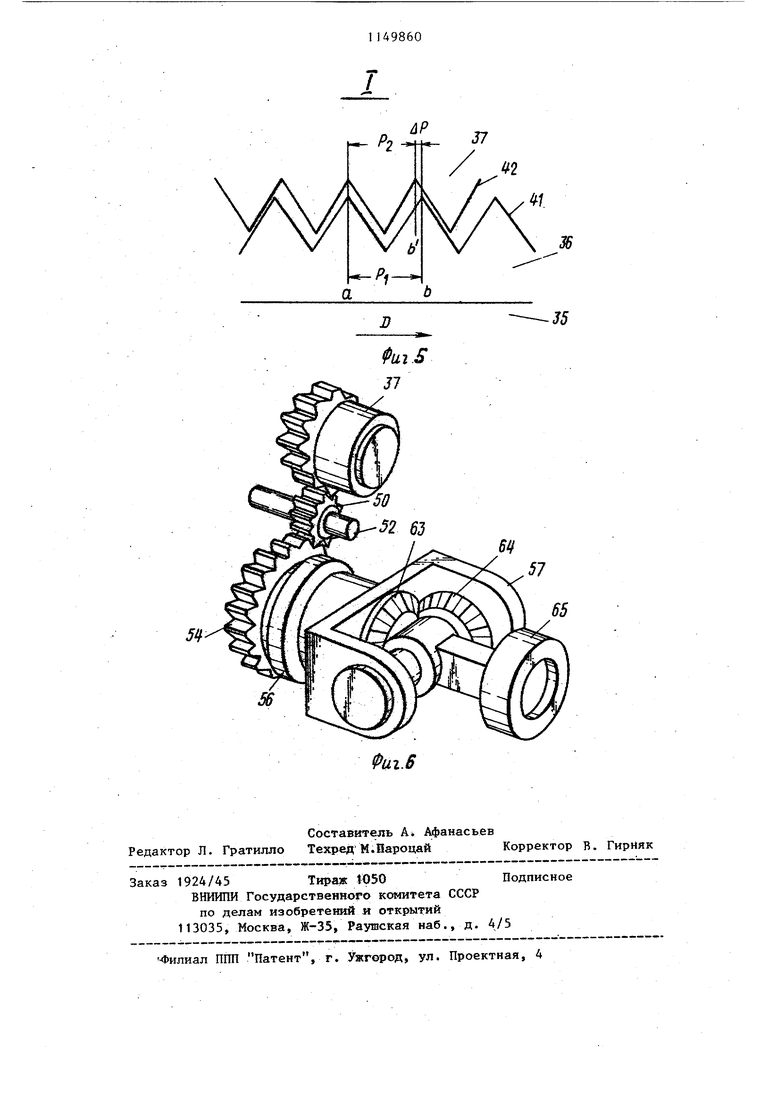
иг. 1 Изобретение относится к промышленному роботу, который снабжен редуцирз щим средством с большим передаточным отношением при редукции и может вызывать одновременно ил поочередно вращательное движение и качакицее движение охвата робота. Известен промьш1ленный робот, содержащий корпус и размещенные в нем два редуцирзпощих привода вращательного и колебательного движений, расположенных параллельно один другому и связанных с исполнительным механизмом JlJ . Недостатками известного устройства являются сложность выполнения, большие габариты и тяжелая конструкция. Целью изобретения является сокращение габаритов. . Цель достигается тем, что в промьшшенном роботе, содержащем корпус и размещенные в нем два редуцирующих привода вращательного и карательного движений, расположенных параллельно один другому и связанных с исполнительным механизмом, оба редуцирующих привода выполнены в виде волново передачи, выходные шестерни которых взаимодействуют с исполнительным механизмом через дополнительно введенное сателлитное зубчатое колесо, ось которого закреплена в корпусе. На фиг. 1 изображена конструкция .промышленного робота с механизмом со ленения, установленным между схватом и руками робота снабженная первой и второй волновыми передачамиJ на фиг. 2 - конструкция механизма сочленения, рук робота и корпус робота, продольный разрез} на фиг. 3 - конструкция механизма сочленения, продольный разрез; на фиг.4 - вид А на фиг. 3J на фиг. 5 узел I на фиг. 4; на фиг. 6 - эацеп ление с первой и второй волновыми передачами (редуктором) и корпусом .конического зубчатого колеса. Промышленный робот (фиг. 1) имее основание 1, прикрепленное к поверх . ности пола, с установленнь1м на нем поворотным столом 2. Последний може вращаться посредством устройства привода (не показан) размещенного на основании 1. К верхней поверхнос ти поворотного стола 2 прикреплены две вертикальные направляющие стойки 3 и 4, а вер тикальный шариковый ходовой винт 5 поддерживается с возможностью вращения на верхней поверхности поворотного стола 2. Нижний конец шарикового ходового винта 5 подсоединен с возможностью вращения к двигателю вертикальной подачи (не показан), установленному на основании 1. Корпус 6 робота входит в зацепление с возможностью скольжения с направляющими стойками 3 и 4через соответствующее подшипниковое средство, а также в резьбовое зацепление с шариковым ходовым винтом 5. Поэтому корпус 6 робота перемещается вертикально в ответ на вращение шарикового ходового винта 5под управлением -направляющих стоек 3 и 4.К корпусу 6 робота подвижно прикреплены две руки 7 и 8 с возможностью удлинения и сокращения в горизонтальном направлении. Механизм 9 сочленения прикреплен к передним концам рук 7 и 8 робота.Схват 10 робота прикреплен к переднему концу механизма 9 сочленения, который осуществляет его вращательное и качающее движения. Приводные двигатели (фиг. 2) размещены в задней части корпуса 6 робота и механизм 9 сочленения посредством двигателей приводится в движение через приводные валы,установленные внутри корпуса 5 робота. Руки 7 и 8 робота поддерживаются соответственно подшипниками 11 - 14 так, чтобы они могли удлиняться и сокращаться в горизонтальном направлении (фиг. 2). Подигапники 11-14 установлены соответственно в задней и передней частях во внутренней полости передних цилиндрических частей 15 и 16 корпуса 6 робота. К переднему концу рук 7 и В прикреплен механизм 9 сочленения, который перемещается вместе с последними. К заднему концу рук 7 и 8 жестко прикреплена пластина 17, перемещающаяся вместе с обоими руками 7 и 8 и механизмом 9 сочленения. В заднем конце корпуса 6 робота установлены (фиг. 2) первый, второй и третий приводные электродвигатели 18 - 20. Первый 18 и второй 19 приводные электродвигатели используются для приведения в движение соответственно первого и второго редукторов (не показаны), размещенных в механизме 9 сочленения, при помоши шариковых 3 шлицевых валов 21 н 22, подсоединенных соответственно к двигателям 18 и 19j и трубчатых валов 73 и 24 находящихся в зацеплении с возможностью скольжения в направлении оси со iL jf;eBbrMi-i рялами 21 и 22. П и U втп: редукторы содаржаг поогй8ТС7 .гнао рол --овую передачу (pi-ДУКРР), которая имее1 сг ецияль ный редух.диокньй мexaмиз f с очень болыд. передаточные отношением. Шар.5кой.е „1ШН1т« в& е залы 2i г, 22 по дерХчНЕаю(.;я с BOSможг-остью вращения обсжи подшипииками 25 и 26, пГИкреплсншза ш к крона Тйй- 27, жестко закрегшенисму на вк / тренних стенках корпуса б, и подшипниками, понкрепленными к пластине 17, Заднка части шлицавых валов 2) и 22 подсоединекь соответственно к дььгателям 18 и 19 через муфты 28 и 2 а передние части находятся в зацеп лении с возможностью скольжения в направлении осей валов с трубчатыми валами 23 и 24. Шариковый хо вой БИНТ 30 поддерживается с возможностью вращения подшипником 31, прикреш1енк: м к кронштейну 27, и подшипником 32s прикрепленным в положении, противоположном подшипнику 31, к передней стенке корпуса 6 робота. Ходовой винт 30 также подсоединен на его заднем конце к третьему 20 пр иводному двигателю через муфту 33 и находится в резьбовом зацеплении в его средней час ти с шариковой гайкой 34, установленной в пластине 17. В результате механизм 9 сочленения горизонтально перемещается внутрь и наружу под действием вращения шарикового ходового винта 30 посредством шариковой гайки 34, пластины 17 и рук 7 и 8 робота. Первая волновая передача (редук тор) (фиг. 3) содержит ведущее колесо 35 (волнообразователь), под соединенное к трубчатому валу 23 и выполненное в виде эллипса, внут реннее колесо 36 (гибкий шлиц), выполненное из эластичного материа ла и имеющее форму цилиндра, и вне нее колесо 37 (кольцевой шлиц), которым можно достичь большого передаточного отношения при редукции Вторая волновая передача также содержит ведущее 38, внутреннее 39 и внешнее 40 колеса, имеющие такой 604 же механизм, как и в первой волновой передаче, На фтгг. 5 ::3ображены внешние зубья 41 внутреннего колеса 36 н внутренние зубья 42 внешнего колеса 37. Ведущее колесо 35 (фиг. 4) выполнен- в эллипса и скользяще вводится в соприкосновение с внутренней периферийной поверхностью 43 в::утрдннего колеса 36 вдоль его внешней периферийной поверхности 44. Так как внутреннее колесо 36 выполнело из эластичного материала и имеет форму тонкого цилиндра, то его часть, соприкасающаяся с ведущим колесом 35, сохраняется деформированной в виде эллипса, если смотреть в направлении их осей, вдоль внеш-. ней периферийной поверхности ведущего колеса 35. Если ведущее колесо 35 вращается в направлении стрелки С и его внешняя периферийная поверхность 44 скользит по внутренней периферийной поверхности 43 внутреннего колеса 36, то часть внутреннего колеса 36, соприкасающаяся с ведущим колесом 35, непрерывно деформируется вдоль внешней периферийной поверхности 44 ведущего колеса 35, т.е. при условии если ось большого диаметра эллипса вращается в направлении стрелки С , и в этом случае точки зацепления между внешней поверхностью (внешними эубьями 41) внутреннего колеса 36 и внутренней поверхностью (внутренними зубьями 42) внешнего колеса .37 перемещаются в направлении стрелки С по внутренней стороне внешнего колеса 37. Последнее снабжено внешними зубьями 45 на его внешней периферийной поверхности. Внутренние зубья 42 на внутренней периферийной поверхности внешнего колеса 37 входят в зацепление с внешними зубьями 41 на обеих концевых частях оси большего диаметра эллиптической формы. Точки зацепления между внешними 41 и. внутренними 42 зубьями непрерывно перемещаются вдоль последних (зубья 42) в результате вращения ведущего колеса 35. В такой волновой передаче (редукторе) внутреннее колесо 36 обычно снабжается внешними зубьями 41 в количестве, меньшем вдвое, чем внутренние зубья 42 внешнего колеса 37. Например, внутреннее колесо 36 имеет 198 внешних зубьев 41, тогда как внешнее колесо 37 имеет 200 внутренних зубьев 42. Поэтому шаг Р| внешних зубьев 41 несколько больше шага внутренних зубьев на величину йР (фиг. 5). Если внутреннее колесо 36 стопорится так что не может вращаться, а внешнее колесо 37 находится в положении. в котором оно может свободно вращат ся, вращение ведущего колеса 35 в направлении стрелки (или по часовой стрелке) вызывает перемещение точки зацепления между внешними 41 и внутренними 42 зубьями из положения q в положение b , так что внешнее колесо 37 вращается в направлении часовой стрелки на величину Д по отношению к внутреннему колесу 3 Когда внешнее колесо 37 стопорится так, что не может вращаться, а внут реннее колесо 36 находится в положении, при котором оно может свобод но вращаться, вра,щение ведущего колеса 35 в направлении стрелки (по часовой стрелке) вызывает перемещение точки зацепления между внеш ними 41 и внутренними 42 зубьями из положения q в положение Ь, , так что внутреннее колесо 36 поворачивается против часовой стрелки на величи ну и Р по отношению к внешнему колесу 37. Таким образом, если ведуще колесо 35 вращается против часовой стрелки, внешнее 35 и внутреннее 36 колеса вращаются соответственно в противоположных напр.авленйях отно сительно направления вращения в упомянутых случаях. Когда внутреннее 36 и внешнее 37 кояеса имеют соответственно 198 внешних и 200 внутренних зубьев, волновая передача обладает большим передаточным отношением при редукции. Если внутреннее колесо 36 стопорится так, что не может вращаться, хотя внешнее колесо 37 может свободно вращат ся, последнее вращается в направлении вращения ведущего колеса 35 с 2/200 числом оборотов на один его оборот. Если внешнее колесо 37 стопорится, так что не может вращаться, хотя внутреннее колесо 36 может свободно вращаться, последнее враща ется в противоположном направлении вращению ведущего колеса 35 с 2/198 оборотов на один его оборот. Такая волновая передача (редуктор) может быть выполнена компактной в результате простого механизма, обеспечивает большое передаточное отношение при редукции в малом объеме и получает отдачу с пониженным числом оборотов и с высоким крутящим моментом. Внутреннее колесо 36 (фиг.З) прикрепляется к корпусу 46. сочленения посредством фиксирующего элемента 47. Внешнее, колесо 37 поддерживается с возможностью вращения подшипниками 48 и 49, прикрепленными к внутренней стороне корпуса . 46 сочленения, и входит в зацепление с шестерней 50 посредством его внешних зубьев 51. Шестерня 50 поддерживается с возможностью вращения валом 52, жестко закрепленным в корпусе 46 сочленения посредством подшипников 53. Внешнее колесо 40 второй волновой передачи (редуктора) поддерживается с возможностью вращения подшипниками 54 и 55,прикрепленными к корпусу 46 сочленения, и также входит в зацепление с шестерней 50 посредством его внешних зубьев 56. К переднему концу внешнего колеса 40 жестко прикреплен кожух конического зубчатого колеса 57 посредством фиксирующего элемента 58. Трубчатый вал 24 в его передней части закрепляется шпонкой для передачи вращающей движущей силы второго приводного двигателя (фиг. 2) на ведущее колесо 38 второй волновой передачи. Внутреннее колесо 39 в его передней части жестко прикреплено к заднему концу вала 59 посредством фиксируюшлх элементов 60. Вал 59 поддерживается с возможностью вращения подшипниками 61 и 62, прикрепленными к внутренней стороне удлиняющейся передней части внешнего колеса 40, В передней части вала 59 вьтолнено за одно целое с валом 59 коническое зубчатое колесо 63, входящее в зацепление с другим коническим зубчатым колесом 64, которое выполнено заодно целое с кронштейном 65 для закрепления на нем схвата робота. Коническое зубчатое колесо 64 с кронштейном 65 поддерживаются с возможностью вращения кожухом конического зубчатого колеса 57 через соответствующее подшипниковое средство. Вращательное движение схвата осуществляется следуюш;им образом. 7 Ведущее колесо 35 (фиг.З) приводится в движение с большой скоростью вращения посредством трубчатого вала 23, который вращает внешнее колесо 37 со значительно пониженной скоростью вращения посредством внешних 41 и внутренних 42 зубьев, так как внутреннее колесо 36 застоп рено и не может вращаться. Внешнее колесо 37 вызывает вращение внешнего колеса 40 через шестерню 50. Поэтому кожух конического зубчатого колеса 57, прикрепленный к внешнему колесу 40, вращается в направлении стрелки Е. , так что охват робота (не показан) вращается чере кронштейн 65. В этом случае внутрен нее колесо- 39 перемещается вместе с внешним колесом 40, так как внешние зубья 66 колеса 39 входят в зацепление с внутренними зубьями 6 колеса 39. Это вращательное движени «ехвата робота в основном осуществляется первым 18 приводным двигателем (фиг. 2). Качающее движение схвата осуществляется следующим образом. Когда колесо 40 находится в состоянии покоя, ведущее колесо 38, вращаемое с большой скоростью вращения трубчатым валом 24, приводит во вращение внутреннее колесо 39 со значительно пониженной скоростью вращения через внутренние 67 колеса 40 и внешние зубья 66 ко леса 39 в противоположном направлении вращения относительно направ ления вращения ведущего колеса 38. Внутреннее колесо 39 передает вра0щаюигую движущую силу на коническое зубчатое колесо 64 через вал 59 и коническое зубчатое колесо 63. В результате вращающего движения конического зубчатого колеса 64 кронштейн 65, который представляет собой выполненную заодно целое часть шестерни, поворачивается в направлении стрелки F . Теперь, когда внешнее колесо 40 находится во вращении, т. е. схват робота на- . ходится во вращательном двюкении, внешнее колесо 40 может рассматриваться как находящееся в подобном застопоренном состоянии в сравнении с ведущим колесом 38, вращаемым с большой скоростью вращения, потому что колесо 40 вращается со значительно пониженной скоростью вращения. Поэтому в этот момент ведущее колесо 38 также приводит в движение внутреннее колесо 39 со значительно пониженной скоростью вращения в противоположном направлении вращения относительно направления вращения ведущего колеса 38, так что схват робота также поворачивается по направлению стрелки F посредством внутреннего колеса 39 и других аналогично описанному. В этом случае поворачивающее движение схвата робота может быть получено одновременно с его вращательным движением. Таким образом, механизм сочленения предлагаемого промьшшенного робота может быть выполнен компактным, в небольшом объеме и без гидравлической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1982 |
|
SU1331420A3 |
| Устройство для последовательной подачи заготовок к схвату робота | 1982 |
|
SU1299490A3 |
| Управляемая рука промышленного робота | 1981 |
|
SU1087060A3 |
| Кисть механической руки | 1982 |
|
SU1179913A3 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU727119A3 |
| Кисть промышленного робота | 1982 |
|
SU1168090A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Автоматическое устройство (его варианты) | 1979 |
|
SU1165227A3 |
| Промышленный робот | 1980 |
|
SU1279521A3 |
| Кисть манипулятора со стыковочным устройством | 1982 |
|
SU1304742A3 |
ПРОМЬШШЕННЫЙ РОБОТ, содержащий корпус и размещенные в нем два редуцирующих привода вращательного и качательного движений, расположенных параллельно один другому и связанных с исполнительным механизмом, отличающийся тем, ЧТО, с целью сокращения габаритов, оба редуцирующих привода выполнены в виде волновой передачи, выходные .шестерни которых взаимодействуют С исполнительным механизмом через дополнительно введенное сателлитное зубчатое колесо, ось которого закреплена в корпусе. (Л гт b4t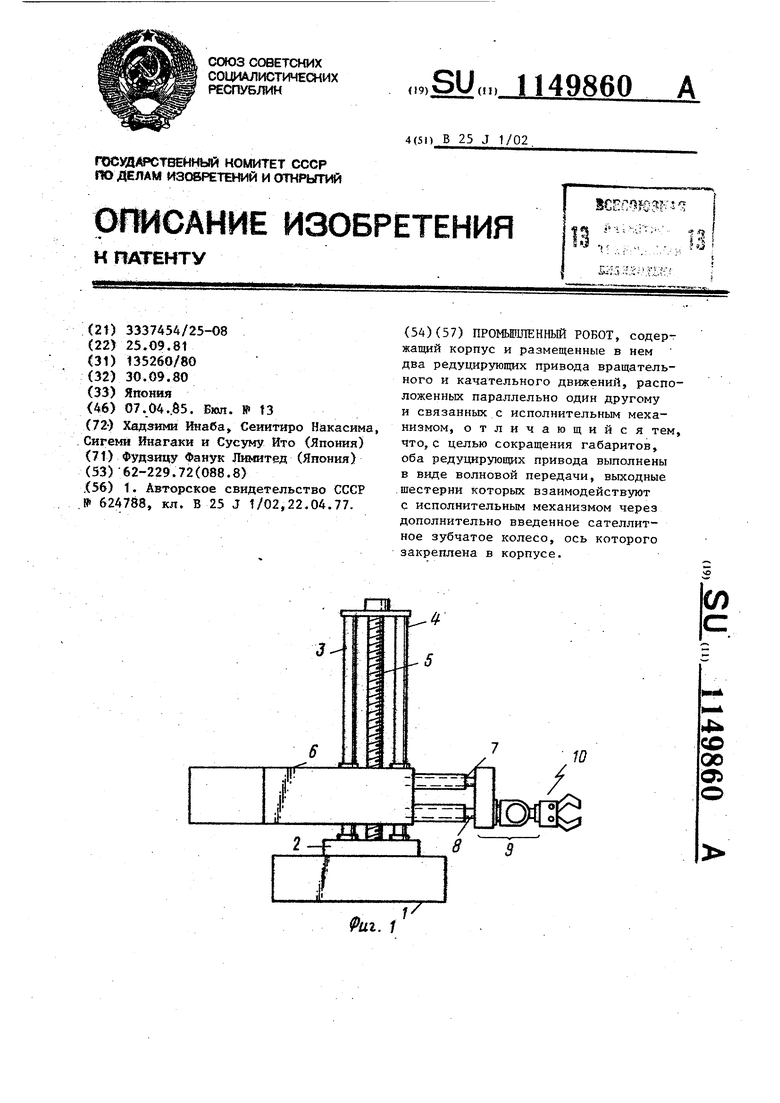
./ l / J7 .: nr
.
if5
«
J7
«/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод робота | 1977 |
|
SU624788A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
