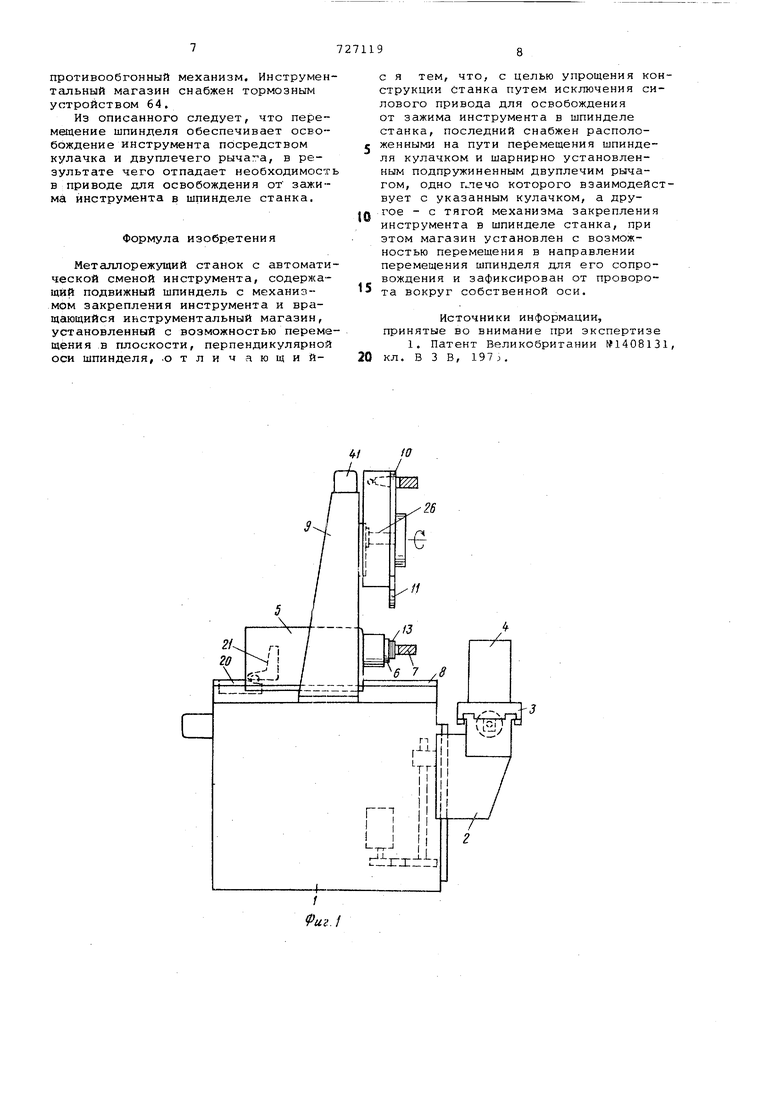
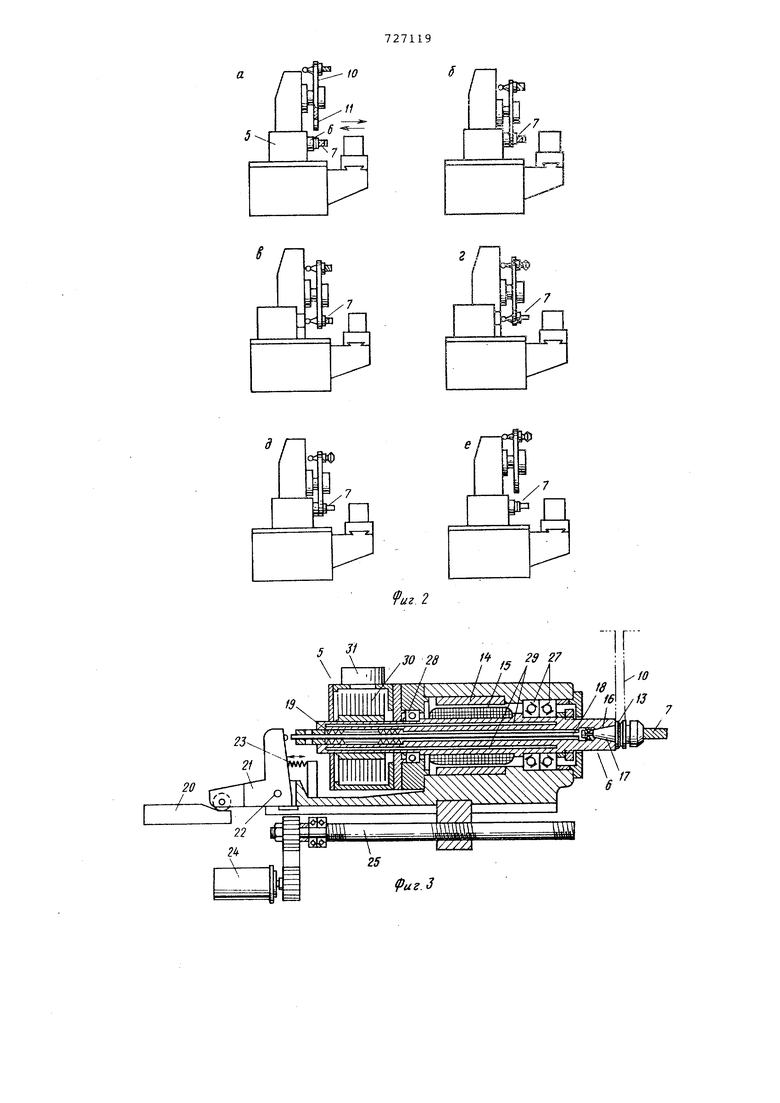
На станине 1 установлена шпиндельная головка 5 со шпинделем 6, подвижная в горизонтальном наггравлении, перпендикулярном направлению перемещения стола 3. На фиг. 1 инструмент 7 показан установленным в шпиндель 6 Шпиндельная головка 5 перемещается по горизонтальным направляющим 8, выполненным на станине 1, в указанном выше направлении.
Кроме того, на станине закреплена стойка Э, на которой смонтирован инструментальный магазин 10 с Kpianкой, закрывающей инструмент. Как будет описано ниже, инструментальный магазин может перемещаться в вертикальном направлении, перпендикулярном направлению оси шпинделя 6, а таже вращаться вокруг собственной оси в направлении, указанном стрелкой А, Инструментальный магазин имеет большое количество гнезд 11 или удерживающих инструменты частей, равномерно расположенных по его окружности. Гнездо 11 снабжено двумя подпружиненными фиксирующими штифтами 12, которые входят во взаимодействие с канавками 13 на инструменте 7, вследствие чего в гнезда можно устанавливать различные типы инструментов с Осью, параллельной оси и.пинделя. На фиг. 1 нижнее гнездо 11 пустое и располагается над инструментом 7, установленным в шпинделе 6.
Рассмотрим теперь процесс смеглы инструмента со ссылками на фиг. 2, где фиг. 2а cooTBevcTByeT фиг. 1.. Процесс выпопняется последовательно со следующими этапами;
1. Инструментальный магазин 10 движется вниз из положения, показанного на рис. 2а, в результате чего инструмент 7 захватывается гнездом 11 магазина (фиг, 2б).
2,- Шпиндельная головка 5 перемещается от магазина, вследствие чего инструмент вынимается из шпинделя и остается в магазине (фиг. 2в) .
3.Инструментальный магазин поворачивается на один или заданное число шагов, в результате чего заранее вь бранный новый инструмент устанавливается соосно со шпинделем 6
{фиг. 2г) .
4.Шпиндельная головка 5 перемещается к магазину, вследствие чего новый инструмент устанавливается в
-шпиндельб (фиг. 2д).
5-. Инструментальный магазин поднимается, оставляя тем самым инструмент в шпинделе и завершая процесс смены инструмента.
Как показано на фиг. 3, в шпиндельной головке 5 установлен возбуждающий магнит 14, прикрепленный внутри к ее корпусу, вокруг шпинделя 6 намотана катушка 15 якоря. Магнит 14 и катушка 15 образуют двигатель постоянного тока, приводящий
в действие шпиндель б, который одновременно является валом якоря. На переднем конце шпинделя выполнено коническое отверстие 16, в которое устанавливаются держатели 17 инструмента 7. Через шпиндель 6 подвижно проходит тяга 18, которая под действием тарельчатых пружин 19 отжимается влево ПС фиг. 3.
Тяга 18 приводится в действие с помощью кулачка 20, прикрепленного к станине 1, и двуплечего рычага 21. Рычаг 21 шарнирно прикреплен к корпусу шпиндельной головки 5 на оси 22 и снабжен пружиной 23. Когда шпиндельная головка перемещается назад с помощью двигателя 24 и ходового вала 25, рычаг 21 поворачивается под действием кулачка 20 вокруг оси 22, преодолевая усилие ггружины 23, по часовой стрелке и тем самым смещает задний конец т .ги 18. В результате этого тяга смещается, преодолевая усилие пружин 19, и тем самым освобождает держатель инструмента.
В процессе освобождения инструмента он и инструментальный магазин 10 должны перемещаться вместе со шгшндельной головкой 5 на определенное расстояние. С этой целью магазин имеет крепление плавающего типа на валу 26.
, На фиг. 3 показаны также подшипники 27 и 28, трубки 29, установленные в шпинделе для охлаждения, радиторные пластины 30 и охлаждающий их вентилятор 31.
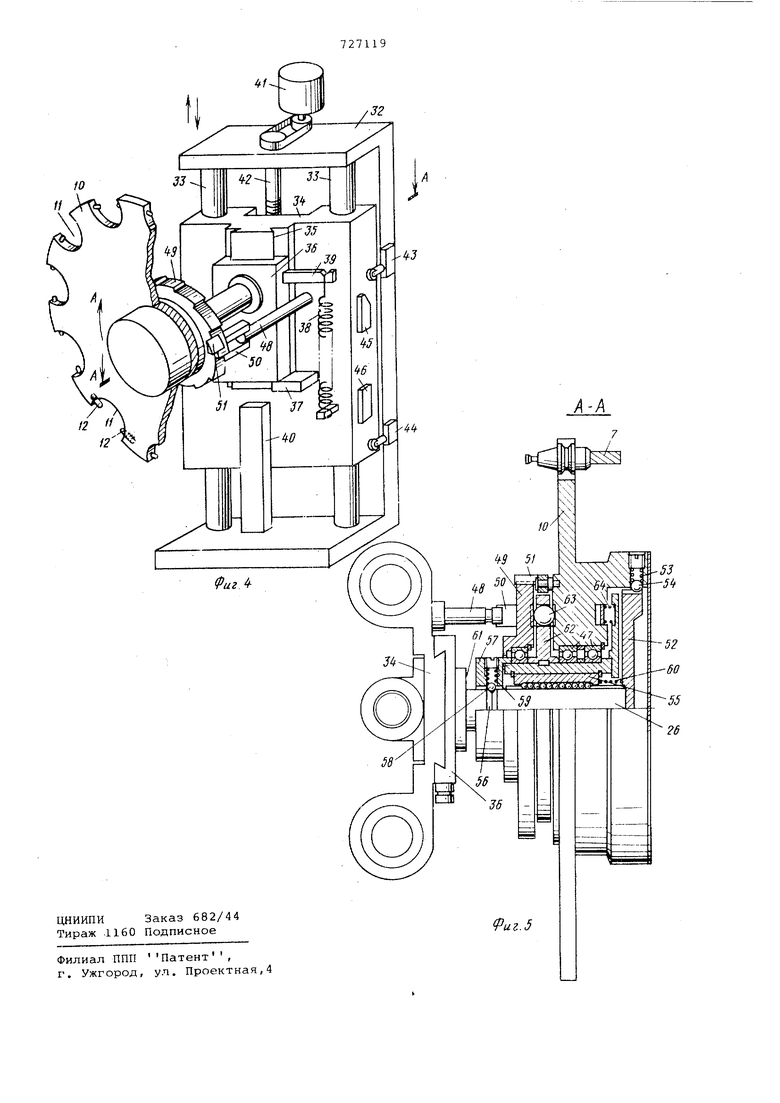
Рассмотрим теперь механизмы перемещения и вращения инструментального магазина со ссылками на фиг. 4 и 5. На стойке 9 имеется опора 32 с двумя направляющими штангами 33. По штангам перемещается каретка 34. На последней выполнена направляющая 35 в форме ласточкиного хвоста, по которой перемещаются салазки 36. Вал 26 прикреплен к салазкам. Каретка 34 снабжена упором 37 и пружиной 38. Следовательно, салазки 36 обычно удерживаются пружиной 38 в положении, в котором их нижний конец упирается в упор 37, как показано на фи г. 4 .
Кроме того, опора 32 снабжена упором 40 для салазок 36. Упор расположен так, что, когда салазки упираются в него, магазин 10 находится в положении, показанном на фиг. 2б-2д, в котором выбранное гнездо или инструмент в инсрументальном магазине располагается соосно со шпинделем 6.
Каретка 34 перемещается по вертикали с помо1ью приводного механизма, включающего двигатель 41 и ходовой винт 42, Величина перемещения каретки определяется механизмом управления, включающим конечные выключатели 43 i: 44, прикрепленные к опоре 32, которые срабатывают под действием собачек 45 и 46 соответс венно, прикрепленных к каретке 34. Как показано на фиг. 5, инструментальный магазин вращ-ательно зак лен на валу 26 с помощью шариковых подшипников 47, Механизм вращения магазина включает рычаг 48, храповое колесо 49, соединение 50 и соб ку 51. Одним концом рычаг 48 прикреплен к каретке 34. Храповое коле со 49 установлено на валу 26 с пом щью шарикового подшипника, в резул тате чего оно может вращаться неза висимо от инструментального магази на 10. Соединение 50, прикрепленно сбоку к храповому колесу 49, состо ит из двух пластин, между которыми установлен свободный конец рычага 48. Собачка 51 шарнирно прикреплен сбоку к магазину и взаимодействует с храповым колесом. Механизм перемещения и вращения инструментального магазина работает следующим образом. Когда двигатель 41 работает для перемещения каретки 34 вниз с помощью ходового винта 42, салазки 36 вместе с кареткой движутся вниз в том же направлении до тех пор, пока их нижний конец не достигнет упора 40. В результате такого перемещения либо выбранное гнездо 11 мага зина 10 подводится для захвата инструмента, находящегося в шпинделе, либо выбранный из магазина инструмент устанавливается соосно со шпинделем. При последующем включении двигателя 41 с тем же направлением вращения дальше вниз перемещается толь ко каретка 34, преодолевая усилие пружины 38. Затем рычаг 48 через соединение 50 поворачивает храповое колесо 49 на заданный угол по стрел ке. А на фиг. 4. В результате вращения храпового колеса и взаимодейс вия с ним собачки 51 в этом же направлении вращается магазин 10. После взаимодействия конечного выключателя 44 с собачкой 46 двигатель 41 останавливается. Таким образом, магазин 10 поворачивается на один шаг-инструмент, вследствие чего сле дующий выбранный инструмент устава ливается соосно со шпинделем 6. После установки в шпиндель нового инструмента в результате перемещ ния вперед шпиндельной головки двиг тель 41 реверсируется, вследствие чего каретка 34 движется вверх до тех пор, пока нижний конец салазок 36 не достигнет упора 37. Во время этого процесса рычаг 48 и соединение 50 вращают храповое колесо 49 назад против стрел си Л; тем самым собачка 51 вводится в зацепление с продвинувшимся на один инструментал ный шаг храповым кол .сом 49. После взаимодействия упора 37 с салазками 36 каретка 34 вместе с салазками 36 перемещается вверх до тех пор, пока конечный выключатель 43 не сработает под действием собачки 45 и двигатель 41 не остановится, В этом случае магазин 10 оставляет инструмент в шпинделе. Как показано на фиг. 5, на свобоцном конце вала 26 закреплена индексирующая плита 52 Сосевыми углублениями по окружности с таким же шагом, что шаг инструментов, в которые под действием пружины 53 входит фиксирующий шарик 54, Следовательно, при вращении с помощью храпового колеса 49 и собачки 51 инструментальный магазин 10 останавливается точно в заданном положении. Инструментальный магазин 10 установлен на валу 26 с помощью шариковой танкетки 55 с возможностью свободного перемещенияf вследствие чего он может пepe teщaтьcя в осевом направлении (плавающее , сопровождающее движение). Танкетка 55 может свободно перемещаться по отношению к валу 26 в осевом направлении, но не вращаться. Кроме того, вал 26 имеет кольцевую канавку 56, а втулка 57 содержит стальной фиксирующий шарик 58, смещающийся под действием пружины 59. Кроме того, между танкеткой 55 и индексирующей плитой 52 установлена пружина 60 так, что магазин 10 обычно находится в осевом положении, при котором фиксирующий шарик 58 входит в канавку 56. В процессе, в котором шпиндельная головка 5 перемещается от инструментального магазина, причем инструмент, находящийся в шпинделе, удер):;:;вается магазином, магазин смещается налево по фиг, 5 до тех пор, пока тяга 3.8 под действием рычага 21 не освободит инструмент. В этом случае фиксирующий шарик 58 выходит из канавки 56 и располагается на поверхности вала 26 г обеспечивая тем самым магазину 10 возможность смещаться в осевом направлении до тех пор, пока втулка 57 не упрется во фланец 61 вала 26. При последующем цикле, при котором шпиндельная головка 5 возвращается к инструментальному магазину с тем, чтобы в шпиндель установить новый инструмент, магазин 10 смещается вправо по фиг. 5, а фиксирующий шарик 58 входит в канавку 56. Как показано на фиг 5, к шариковой танкетке 55 Гтрикреплен диск 62, расположенный между магазином 10 и храповым колесом 49. В диске 62 установлены стальные шарики 63, диаметр которых чуть больше, чем толщина диска. Шарик 63 вместе с окружными канавками, выполненными на противоположных сторонах магазина 10, и храповым колесом 49 образует известный
противообгонный механизм. Инструментальный магазин снабжен тормозным устройством 64.
Из описанного следует, что перемещение шпинделя обеспечивает ОСЕЮбождение инструмента посредством кулачка и двуплечего рычага, в результате чего отпадает необходимость в приводе для освобождения от зажима инструмента в шпинделе станка.
Формула изобретения
Металлорежущий станок с автоматической сменой инструмента, содержащий подвижный шпиндель с механизмом закрепления инструмента и вращающийся инструментальный магазин, установленный с возможностью перемещения в плоскости, перпендикулярной оси шпинделя, .отличающийс я тем, что, с целью упрощения конструкции станка путем исключения силового привода для освобождения от зажима инструмента в шпинделе станка, последний снабжен расположенными на пути перемещения шпинделя кулачком и шарнирно установленным подпружиненным двуплечим рычагом, одно которого взаимодействует с указанным кулачком, а другое - с тягой механизма закрепления инструмента в шпинделе станка, при этом магазин установлен с возможностью перемещения в направлении перемещения шпинделя для его сопровождения и зафиксирован от проворота вокруг собственной оси.
Источники информации, принятые во внимание при экспертизе
1. Патент Великобритании №1408131, 20 кл. В 3 В, 19 7 J ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство автоматической смены инструментов сверлильно-фрезерного станка | 1982 |
|
SU1047649A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Полуавтоматическая круглоделительная машина | 1983 |
|
SU1146176A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Устройство для автоматической смены инструментов на металлорежущем станке | 1978 |
|
SU1036238A3 |
| Полуавтомат для заточки многолезвийного инструмента с прямыми и винтовыми стружечными канавками | 1968 |
|
SU300047A1 |
| Автомат для заточки сверл | 1955 |
|
SU117642A1 |
| Устройство для подачи деталей | 1984 |
|
SU1229016A1 |
Wte
/
Я
