(54) РЕГУЛЯТОР НАТЯЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор натяжения | 1984 |
|
SU1232621A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УРАБОТКИ ОСНОВЫ НА ТКАЦКОМ СТАНКЕ | 1992 |
|
RU2039136C1 |
| Устройство для регулирования натяжения нитей основы на ткацком станке | 1988 |
|
SU1633036A1 |
| Регулятор натяжения нитей основы на ткацком станке | 1989 |
|
SU1654390A1 |
| Устройство для регулирования натяжения нити на мотальном автомате | 1981 |
|
SU1027127A1 |
| Устройство для контроля продольной жесткости основы в выпускной части шлихтовальной машины | 1991 |
|
SU1802315A1 |
| Устройство для регулирования линейной плотности кромки ткани на бесчелночном ткацком станке | 1983 |
|
SU1131933A1 |
| Устройство для регулирования натяжения нитей на сновальной машине | 1984 |
|
SU1221260A1 |
| Нитеподающее устройство с электронным регулированием натяжения нити | 1987 |
|
SU1727535A3 |
Изобретение относится к текстильной промышленности, конкретнее, к регуляторам натяжения нитей при их намотке на ткацкий навой.
Известен регулятор натяжения, преимущественно для наматьшакия ткацких навоев, содержащий аналоговый датчик натяжения нитей, тиристорный преобразователь частоты, первый вход которого соединен с задатчиком линейной скорости движения нитей, а выход подключен к асинхронному электродвигателю, вал которого кинематически связан с навоем, и аналоговый заддтчик натяжения нитей 11 .
Основной недостаток известного устройства заключается в том, что в нем реализуется статический закон регулирования натяжения с. постоянным козффициентом усиления, . что сопряжено с возникновением достаточно большой ошибки регулирования при больших возмущениях.
Цель изобретения - повышение точности регулирования.
Поставленная цель достигается благодаря тому, что регулятор натяжения имеет последовательно включенные управляемый генератор и цифровой интегратор, при этом выходы аналоговых датчика и задатчика натяжения соответственно связаны с первым и вторым входами управляемого генератора, а выход цифрового интегратора подключен к второму входу тиристорного преобразования частоты.
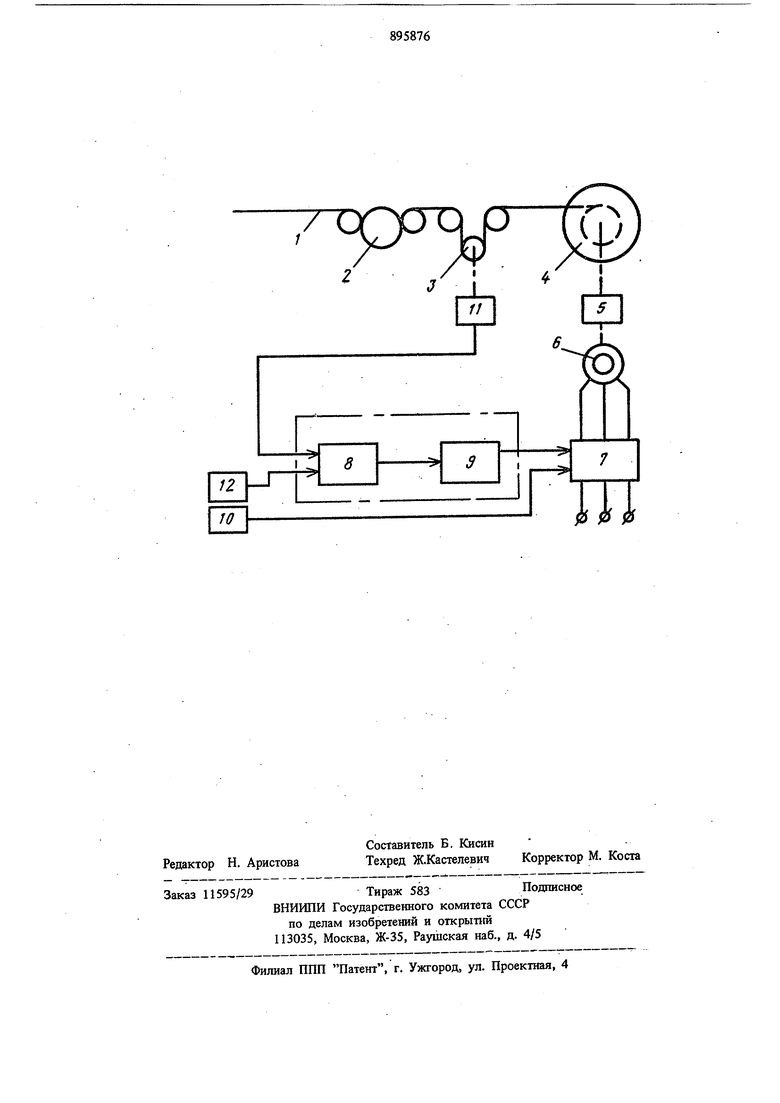
На чертеже показана блок-схема устройства.
10
Нити 1 основы проходят через выпускной вал 2, валик 3, установленный с возможностью перемещения, и наматываются на ткацкий навой 4, который через механическую передачу 5 связан с валом асинхронного электродвига15теля 6, подключенного к тирнсторному преобразователю 7 частоты. Регулятор имеет управляемый генератор 8, который через цифровой интегратор 9 связан с первым входом преобразователя 7, второй вход которого ПОДКЛЮ
20
чен к выходу задатчика 10 линейной скорости гшижения нитей. Аналоговый датчик 11 натяжения нитей механически связан с валиком 3 и электрически - с первым входом управляемого
генератора 8, второй вход которого соединен с аналоговым задатчиком 12 натяжения нитей. Регулятор работает следзоощим образом, С увеличением радиуса паковки ткацкого навоя 4 увеличивается натяжение нитей. 1, что вызьюает появление положительного напряжекия рассогласования на входе управляемого генератора 8, так как етгнал датчика И натяжения оказывается большим сигнала задания натяжения, поступающего с эадатчика 12. При этом генератор 8 открьшается и положительные .импульсы его начинают ступенчато увеличивать напряжение на выходе цифрового интегратора 9. Последнее вычитаясь из напряжения задатчика 10 линейной скорости движения Нитей, уменьшает частоту тока тиристорного преобразователя 7 частоты, и частоты вращения приводного двигателя 6 и навоя 4. Натяжение нитей 1 при этом также будет уменьшаться. Как только натяжение нитей 1 достигнет первоначального значения, сигналы с задатчика 12 и датчика И натяжения сравниваются, генератор 8 закрывается, а напряжение на выходе цифрового интегратора 9 зафиксируется постоянным, но большим на величину, обратно пропорциональную увеличению радиуса паковки, т.е. величину, определяющую частоту вращения навоя при увеличенном радиусе с целью получения заданного натяжения нитей 1.
При случайном уменьшении натяжения нитей 1 процесс установления его происходит аналогичным образом, только при этом сигнал задатчика 12 оказывается большим сигнала датчика 11 натяжения, генератор- вьщает отрицательные импульсы, а выходное напряжение цифрового интегратора 9 начинает падать. Последнее увеличивает частоту тока преобразователя 7, частоты вращения двигателя 6 и навоя 4 и, следовательно, натяжение нитей на участке выпускной вал - ткацкий навой.
Характерной особенностью работы управляемого генератора является то, что с увеличением сигнала, рассогласования на его входе увеличивается частота импульсов на его выходе, а с уменьшением сигнала рассогласования уменьцшется. Благодаря этому улучшаются динамические характеристики регулятора, J taK как снижается вероятность перерегулирования.
Экономический эффект от использования данного регулятора определяется повышением точности регулирования натяжения основных нитей.
Формул.а изобретения
Регулятор натяжения, преимущественно для наматьтания ткацких навоев, содержацщй аналоговый датчик натяжения нитей, тиристорный преобразователь частоты, первый вход которого соединен с задатчиком линейной скорости движения нитей, а выход подключен к а жнхронному электродвигателю, вал которого кинематически связан с навоем, и аналоговый задатчик натяжения нитей, о тличающийся тем, что, с целью повышения точности регулирования, он имеет последовательно включенные управляемый генератор и цифровой интегратор, при этом выходы аналоговых датчика и задатчика натяжения соответственно связаны с первьпи и вторым входами управляемого генератора, а выход цифрового интегратора подключен к второму входу тиристорного преобразова5 теля частоты.
ИсточниХЬ информации, принятые во внимание при экспертизе
/ лСГ
//
2/ «
«7 1
