Изобретение относится к приборостроению, а именно к механизмам транспортирования носителя информации в аппаратуре магнитной записи.
Цель изобретения - повышение надежности работы механизма при обеспечении стабильности параметров в жестких условиях эксплуатации.
На фиг.1 приведен вариант построения кинематической схемы; на фиг.2 - первое рабочее положение собачек; на фиг.З - второе рабочее положение собачек.
Реверсивный лентопротяжный механизм содержит боковые узлы, включающие катушки 1 и 2 с носителем 3 информации, реверсивный электродвигатель 4, соединенный через редуктор 5 с ведущими колесами 6 и 7, расположенными на общих осях 8 и 9. На этих же осях расположены ведомые храповые колеса 10 и 11, каждое из которых жестко соединено со своей катушкой, и свободно вращающиеся вспомо- гательные переключающие храповые колеса 12 и 13. I
Храповые колеса 10, 12 и П, 13,
расположенные по обе стороны от ведущих колес 6 и 7 соответственно, имеют встречный наклон зубьев. На ведущие колеса 6 и 7 установлены двуплечие поворотные собачки 14 и 15, симметричные осям 16 и 17 поворота, причем оси 16 и 17 поворота параллельны образующим поверхностям зубьев храповых колес 10, 12 и 11, 13 соответственно. Плечи 18, 19, 20 и 21 поворотных собачек 14 и 15 -размещены по обе стороны от ведущих колес 6 и 7 с возможностью поочередного кинематического взаимодействия с храповым колесами 10, 12 и 11, 13 соответственно.
Устройство работает следующим об- 5 вращения ведомых колес 10 и 11 и разом.плавности транспортирования носитеПри подаче напряжений на электро- ля 3 информации.
двигатель 4 крутящий момент через ре- Одновременно собачка 14 аналогич- дуктор 5 передается на ведущие коле50
са 6 и 7. В зависимости от направления вращения электродвигателя 4 крутящий момент посредством двуплечих поворотных собачек 14 или 15, установленных на ведущих колесах, передается одному из ведомых храповых колес 55 ДУ зубьями храпового колеса 10, ко- 10 и 11 соответственно.торое передает вращение катущке 1.
Например, если ведущие колеса 6 При этом происходит наматывание но- и 7 вращаются по направлению часовой сителя 3 информации на катущку I, ко- стрелки (фиг.2), двуплечая поворот- торая становится ведущей.
ным образом выходит из зацепления с храповым колесом 12 и входит в зацепление с храповым колесом 10, а именно плечо 19 собачки 14 выходит из зацепления с храповым колесом 12, а плечо 12 упирается во впадину меж
0
ная собачка 15, закрепленная на ведущем колесе 7, плечом 20 входит в зацепление с храповым колесом 1I и передает вращение катущке 2. Происходит наматывание носителя 3 информации на катушку 2, которая в данный момент является ведущей.
Одновременно двуплечая собачка 14, закрепленная на ведущем колесе 6, плечом 19 входит в зацепление с храповым колесом 12, так как зубья храповых колес 10 и 11 имеют встречный наклон относительно храповых колес 12 и 13 соответственно.
5 I
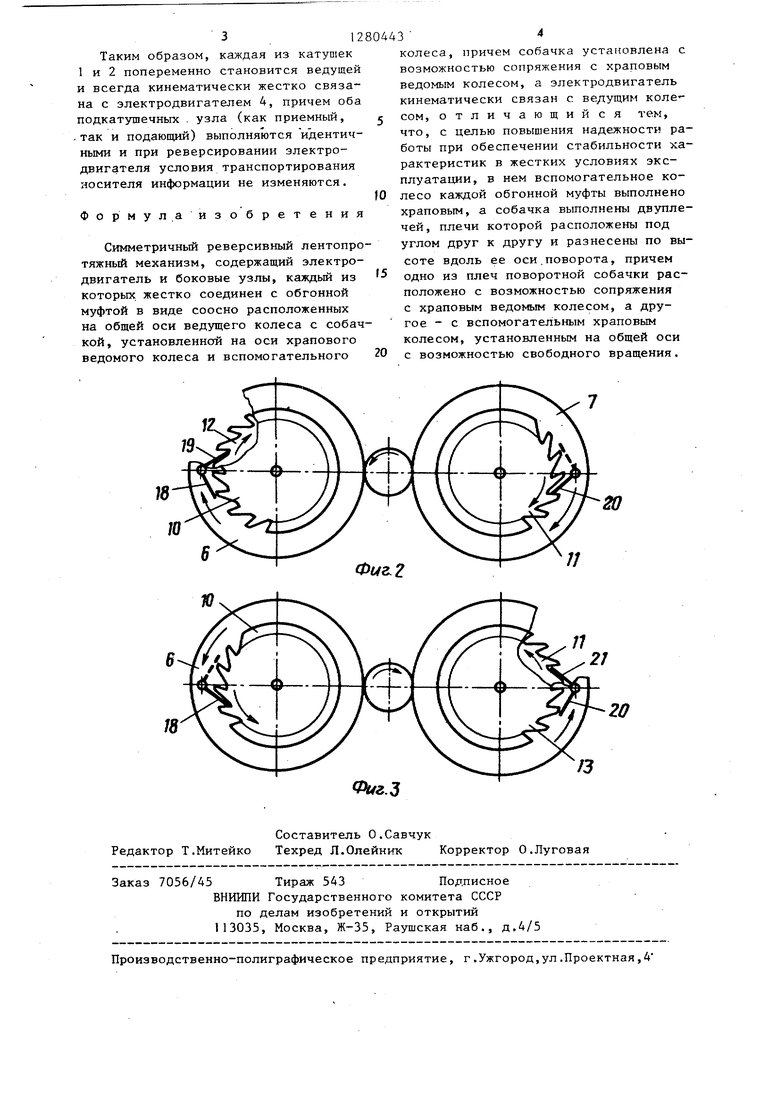
При реверсировании электродвигателя 4 ведущие колеса 6 и 7 начинают вращаться против направления часовой стрелки (фиг.З).
При этом катущки 1 и 2 не вращаются и храповые колеса 10, 11, 12 и 13 остаются неподвижными эа счет сил трения в подщипниках.
Ведущее колесо 7, вращаясь, пере- 5 мещает двуплечую собачку 15 относительно зубьев храповых колес 11 и 13. Плечо 20 собачки 15 начинает скользить по наружной поверхности зуба храпового колеса 11 и выходить из зацепления с ним. Собачка 15 при этом поворачивается вокруг оси 17 качания , вводя плечо 21 в зацепление с храповым колесом 13.
Храповое колесо 11 теряет кинематическую связь с собачкой 15. Размеры двуплечей собачки и место ее установки выбраны таким образом, чтобы, например, плечо 20 собачки 15 полностью вьгашо из соприкосновения с храповым колесом 11, а плечо 21 имело бы еще некоторый ход до упора во впадину между зубьями храпового колеса 13. Целью такого технического ре- щения является обеспечение плавности
0
5
0
Одновременно собачка 14 аналогич-
ДУ зубьями храпового колеса 10, ко- торое передает вращение катущке 1.
ным образом выходит из зацепления с храповым колесом 12 и входит в зацепление с храповым колесом 10, а именно плечо 19 собачки 14 выходит из зацепления с храповым колесом 12, а плечо 12 упирается во впадину межТаким образом, каждая из катушек 1 и 2 попеременно становится ведущей и всегда кинематически жестко связана с электродвигателем 4, причем оба подкатушечных . узла (как приемный, - так и подающий) выполняются идентичными и при реверсировании электродвигателя условия транспортирования носителя информации не изменяются.
Формуя.аизобретения
Симметричный реверсивный лентопротяжный механизм, содержащий электродвигатель и боковые узлы, каждый из которых жестко соединен с обгонной муфтой в виде соосно расположенных на общей оси ведущего колеса с собачкой, установленной на оси храпового
ведомого колеса и вспомогательного
колеса, причем собачка установлена с возможностью сопряжения с храповым ведомым колесом, а электродвигатель кинематически связан с ведущим коле-- сом, отличающий ся тем, что, с целью повышения надежности работы при обеспечении стабильности характеристик в жестких условиях эксплуатации, в нем вспомогательное колесо каждой обгонной муфты выполнено храповым, а собачка выполнены двуплечей, плечи которой расположены под углом друг к другу и разнесены по высоте вдоль ее оси.поворота, причем одно из плеч поворотной собачки расположено с возможностью сопряжения с храповым ведомым колесом, а другое - с вспомогательным храповым колесом, установленным на общей оси с возможностью свободного вращения.
79
/Э
Фиг.
Составитель О.Савчук Редактор Т.Митейко Техред Л.Олейник Корректор О.Луговая
Заказ 7056/45 Тираж 543Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород,ул.Проектная,4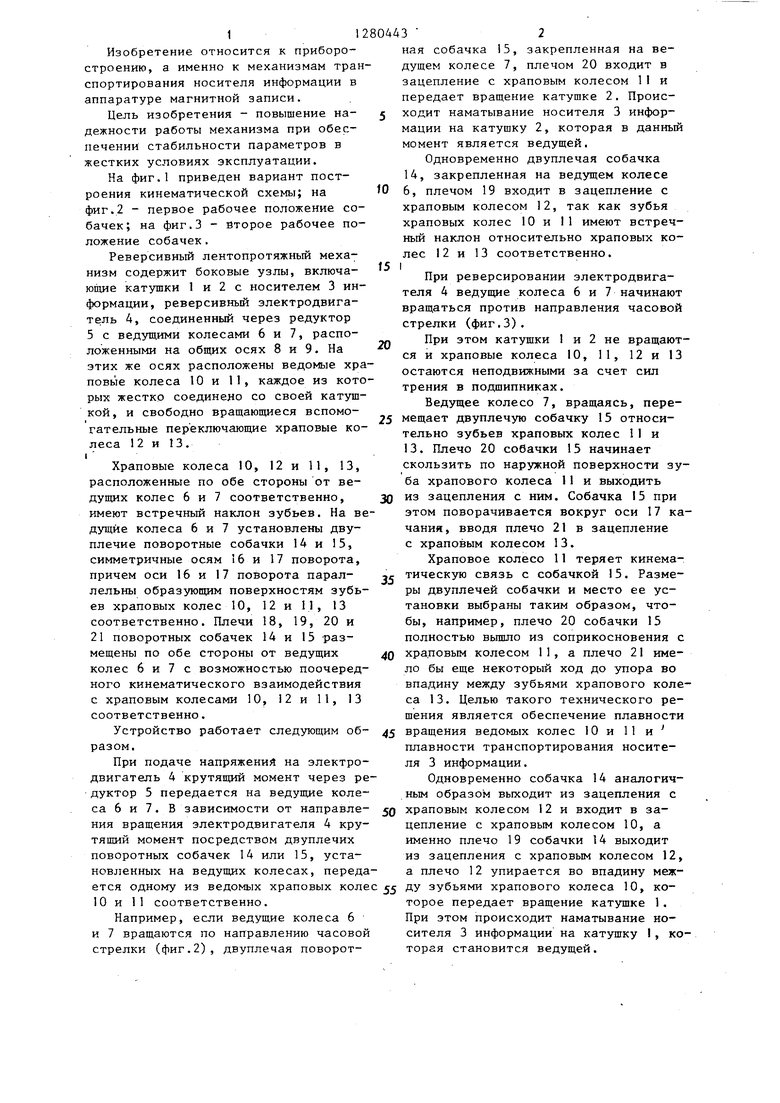
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный храповой механизм | 1985 |
|
SU1499016A1 |
| РЕДУКТОР ХРАПОВОЙ РЕВЕРСИВНЫЙ | 2003 |
|
RU2253780C1 |
| ПОНИЖАЮЩИЙ РЕДУКТОР | 2013 |
|
RU2582747C2 |
| Храповой механизм для преобразования возвратно-поступательного движения в прерывистое вращательное | 1977 |
|
SU682707A1 |
| ВЕРТИКАЛЬНЫЙ КОВШОВЫЙ ЭЛЕВАТОР | 1992 |
|
RU2044683C1 |
| Муфта свободного хода | 1980 |
|
SU1208362A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Коробка передач | 1986 |
|
SU1308793A2 |
| Дифференциал переднего ведущего моста транспортного средства | 1987 |
|
SU1459953A1 |
| Привод стартера-генератора газотурбинного двигателя | 1981 |
|
SU1009146A1 |
Изобретение относится к приборостроению, а именно к механизмам транспортирования носителя информапии в аппаратуре магнитной записи. Цель изобретения - повышение надежности работы при обеспечении стабильности характеристик в жестких условиях эксплуатации. Обгонные муфты механизма вьшолнены в виде соосно расположенных на общей оси ведущих колес 6 и 7, на которых установлены поворотные собачки 14 и 15, и вспомогательных колес 12 и 13 Выполнение каждой собачки двуплечей, причем плечи, установленные под углом друг к другу, разнесены по высоте вдоль ее оси поворота, обеспечивает плавность вращения ведомых колес 10 и 11 и плавность транспортирования носителя 3 информации. В момент, когда плечо 20 собачки 15 полностью выходит из контакта с колесом II, а плечо 21 имеет некоторый ход до упора во впадину между зубьями колеса I3, плечо 19 собачки 14 выйдет из зацепления с колесом 12, а плечо 18 упрется во впадину между зубьями колеса 10, передающего вращение катушке I. 3 ил. § (Л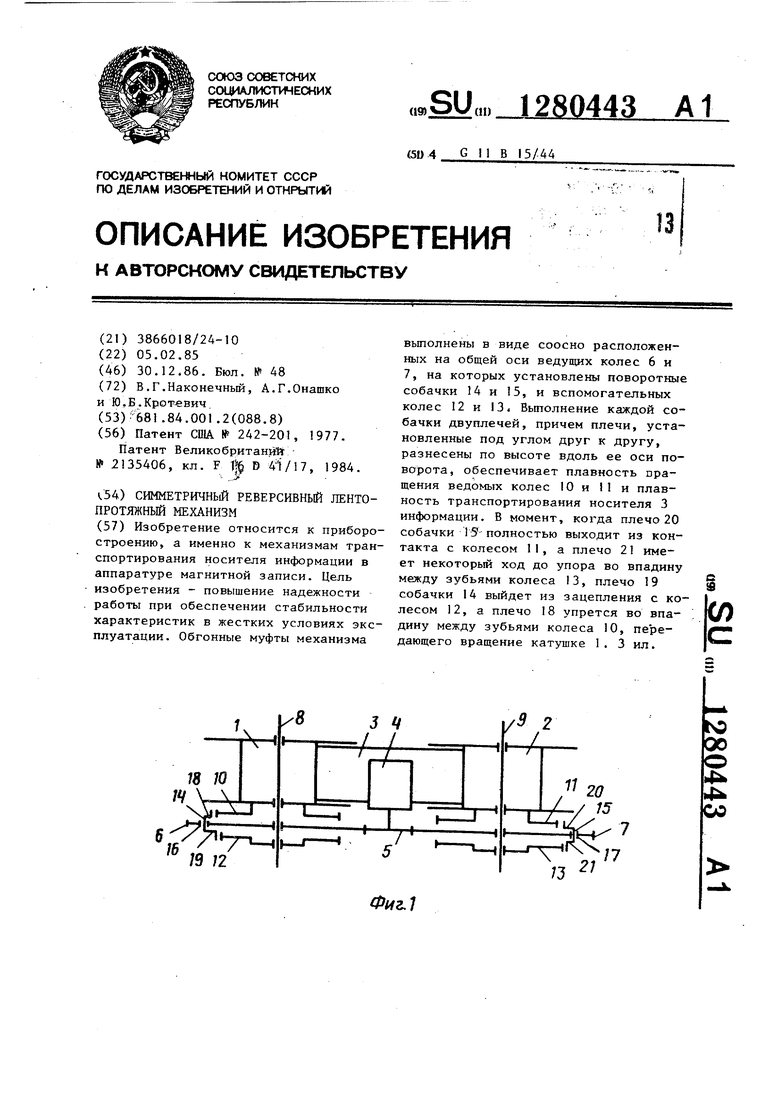
| Металлические подъемные леса | 1921 |
|
SU242A1 |
| СПОСОБ ПОЛУЧЕНИЯ БРОМИДОВ ЩЕЛОЧНЫХ МЕТАЛЛОВ, КАЛЬЦИЯ И АММОНИЯ | 1997 |
|
RU2135406C1 |
| Механический грохот | 1922 |
|
SU41A1 |
| - ., (.54) СИММЕТРИЧНЬЙ РЕВЕРСИВНЫЙ ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ | |||
