Изобретение относится к машино- строитель71ой и другим металлообра- бат1,1ваю1цим областям промышленности, использующим вибрационные установки для очистки и отделки поверхностей деталей.
Цель изобретения - расширение технологических возможностей устройства путем обеспечения возможности управления величиной и направлением резул тирующей возмущающих сил дебалансных валов.
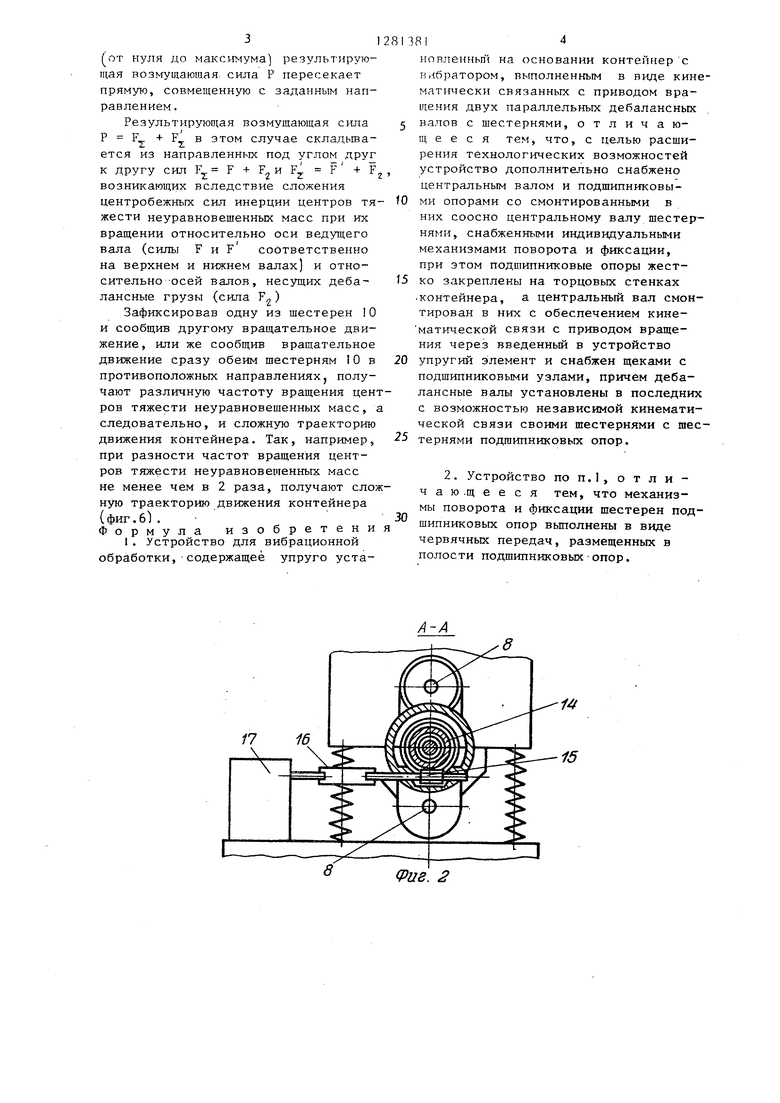
На фиг.1 изображено устройство, общий видJпоперечный разрез; на фиг.2 - разрез А-А на фиг,1; на фиг.3 - положение и движение центров тяжес.ти неуравновешенных масс, обеспечивающее максимальную возмущающую силу,направленную вверх по вертикали на фиг.4 - то же, но соответствую- щее нулевой возмущающей силе; на фиг.5 - то же, но соответствующее одному из промежуточных значений возмущающей силы; на фиг.6 - общий ха- рактер сложной траектории движения контейнера.
Устройство для вибрационной обработки состоит из основания 1 с амортзаторами 2, имеющими линейную характеристику жесткости. На основании 1 закреплен привод 3, соединенный гибкой муфтой 4 с центральным валом 5. На ведутцем валу 5 укреплены щеки 6, между которыми подвижно установлены несущие дебалансные грузы 7, дебалансные валы 8, снабженные щестернями 9, находящимися попарно в зацеплении с центральными шестернями 10, смонтированными в подшипниковых опорах вала 5 и кинематически связанными с закрепленными на контейнере II механизмами 12 их поворота и фиксации.
Механизм поворота и фиксации выполнен в виде сочлененной с шестерп ней 10 втулки 13, снабженной червячным колесом I4, находящимся в зацеплении с червяком 15, кинематически связанным посредством гибкой муфты 16 с приводом 17 управления.
Устройство для вибрационной обработки работает следующим образом.
Центральный вал 5 устройства получает крутящий момент от привода 3 через гибкую муфту 4 и посредством щек 6 передает его несущим дебалансные грузы 7 дебалансным валам 8 и укрепленным на них шестерням 9. Шее
0
0
5
0
5
0
5
терни 9, совершая сложное движение, обкатываются вокруг шестерен 10 и вращаются вокруг собственной оси. При этом любая точка шестерен 9 будет иметь так назьтаемое эпициклическое движение. Такое же движение будет совершать и центр тяжести неуравновешенной массы дебалансных грузов 7, создавая центробежную силу. Эта центробежная сила одинакова на различных участках эпициклической траектории движения центра тяжести неуравновешенной массы и отличается лишь направлением.Взаимное положение центров тяжести неуравновешенных масс на траекто-, рии их движения меняют поворотом шестерен 10 посредством механизмов 12 их поворота и фиксации. Привод 17 управления по заданной программе сообщает самотормозящейся передаче, включающей червяк 15 и червячное колесо 14, крутящий момент, необходимый для поворота или вращения шестерен 10.
На фиг.З показано положение и движение центров тяжести неуравновешенных масс, обеспечивающее максимальную результирующую силу, направленную вверх по вертикали. -В этом случае шестерни 10 зафиксированы в положениях, при которых центр тяжести одной неуравновешенной массы пересекает вертикаль, проходящую через оси вращения валов 8, на максимальном удалении от оси вала 5, а центр тяжести другой неуравновешенной массы - на максимальном приближении, при этом кардиоиды верхнего и нижнего валов совмещены между собой.
На фиг.4 - то же, но соответствующее нулевой возмущающей силе. В этом случае шестерни 10 зафиксированы в положениях, при которых центры тяжести обеих неуравновешенных масс пересекают прямую, проходящую через оси вращения валов В, на одинаковом удалении от оси вала 5, при этом кардиоида нижнего вала повернута на 180 относительно эпициклоиды верхнего вала.
На фиг.З - то же, но соответствующее одному из промежуточных значений, возмущающей силы, когда кардиоида нижнего вала повернута на 90 относительно кардиоиды верхнего вала. В этом случае шестерни 10 зафиксиро-; ваны в положениях, при которых выбранная в пределах возможной величины
от нуля до максимума) результирующая воз гущаюгадя сила Р пересекает прямую, совмещенную с заданным направлением.
Результируюп ая возмущающая сила Р F + F в этом случае складьша- ется из направленных под углом друг к другу сил F F F и Fj. F возникающих вследствие сложения центробежных сил инерции центров тя жести неуравновещенных масс при их вращении относительно оси ведущего вала (силы F и F соответственно на верхнем и нижнем валах) и относительно -осей валов, несущих деба- лансные грузы (сила F)
Зафиксировав одну из щестерен 10 и сообщив другому вращательное движение, или же сообщив вращательное движение сразу обеим шестерням 10 в противоположных направлениях, получают различную частоту вращения ценров тяжести неуравновешенных масс, следовательно, и сложную траекторию движения контейнера. Так, например, при разности частот вращения центров тяжести неуравновешенных масс не менее чем в 2 раза, получают слоную траекторию движения контейнера (фиг.6) .
Формул
1
мула изобретени Устройство для вибрационной
обработки, содержащее упруго уста
Ш 5
20 30
25
новленньп на основании контейнер с Kii6paTopOM, выполненным в виде кинематически связанных с приводом вращения двух параллельных дебалансных валов с щестернями, отличающееся тем, что, с целью расщи- рения технологических возможностей устройство дополнительно снабжено центральным валом и подшипниковыми опорами со смонтированными в них соосно центральному валу шестернями, снабженными индивидуальными механизмами поворота и фиксации, при этом подшипниковые опоры жестко закреплены на торцовых стенках .контейнера, а центральный вал смонтирован в них с обеспечением кине- матической связи с приводом вращения через введенный в устройство упругий элемент и снабжен щеками с подшипниковыми узлами, причем деба- лансные налы установлены в последних с возможностью независимой кинематической связи своими шестернями с шестернями подшипниковых опор.
2. Устройство по п.1, отличаю.щееся тем, что механизмы поворота и фиксации шестерен подшипниковых опор выполиены в виде червячных передач, размещенных в полости подшипниковыхопор.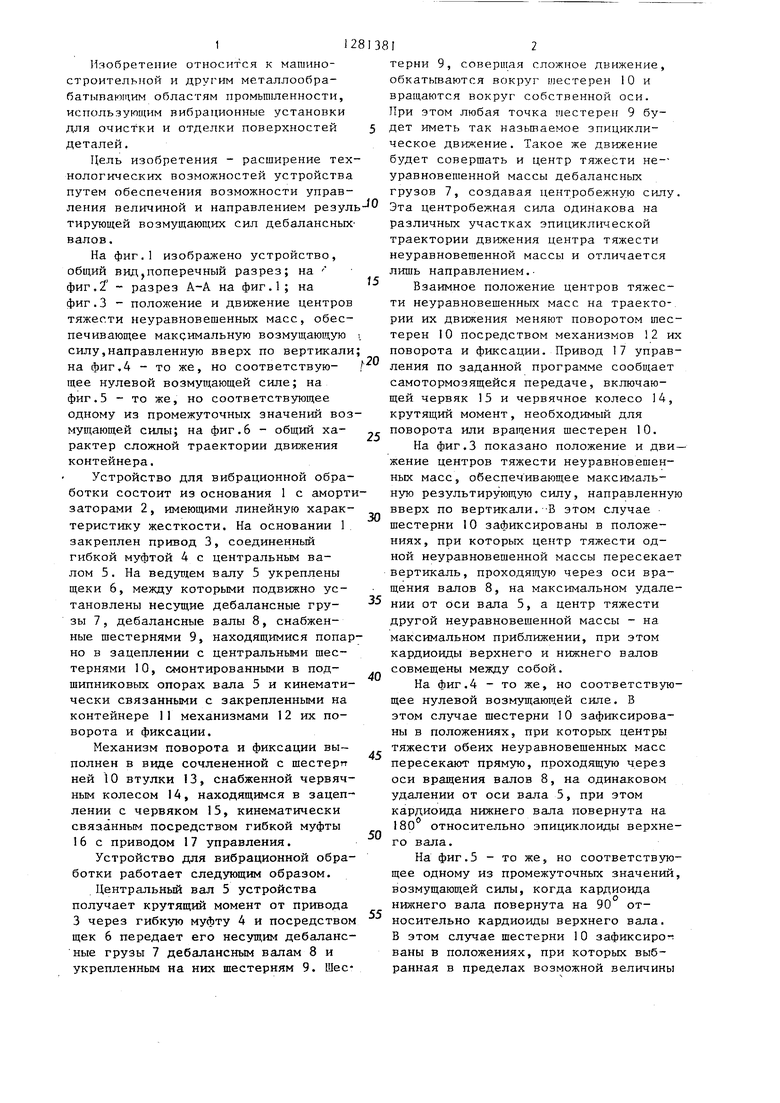
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вибрационной обработки | 1987 |
|
SU1509233A1 |
| Устройство для вибрационной обработки деталей | 1986 |
|
SU1404295A1 |
| Машина для вибрационной обработки | 1990 |
|
SU1738612A2 |
| ИНЕРЦИОННОЕ ДВИЖУЩЕЕ УСТРОЙСТВО ИДУ-4 | 1993 |
|
RU2076241C1 |
| Вибратор | 1949 |
|
SU87935A1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДЕЙСТВУЮЩЕЙ СИЛОЙ (ВАРИАНТЫ) И РЕГУЛИРУЕМЫЙ ВИБРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531518C1 |
| Устройство для вибрационной обработки | 1987 |
|
SU1458182A1 |
| Вибровозбудитель | 1987 |
|
SU1569037A1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| СПОСОБ СОЗДАНИЯ ИНЕРЦИОННЫХ ОДИНАКОВЫХ ПО ВЕЛИЧИНЕ ИМПУЛЬСОВ В ЗАДАННОМ КООРДИНАТНОМ НАПРАВЛЕНИИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1994 |
|
RU2083419C1 |

Изобретение относится к машиностроительной и другим металлообраба- тьгеающим областям промышленности, использующим вибрационные установки для очистки и отделки поверхностей деталей,и позволяет расширить технологические возможности устройств для вибрационной обработки путем обеспечения управления величиной и направлением результируюп1ей возмущающих сил дебалансньгх валов 8, несущих дебалансные грузы 7, за счет использования в качестве привода их вращения планетарной передачи с центральным валом 5 и обеспечения независимого разворота валов от механизмов вращения, кинематически связанных с валами посредством установленных на них гаестерен 9. 1 з.п. ф-лы. 6 ил. а 11 Г У / 52 15 9, 10 СЛ Ю 00 со 00 (Риз. i б i3 А H-V
(Риг. 2
фиг.З
Фив4
.fi
f, fr(риг.6
Составитель А.Букатов Редактор В.Иванова Техред Л.Опейник Корректор Е.Сирохман
Заказ 7196/10 Тираж 712Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, А
| Вибрационная машина для обработки деталей в контейнере | 1977 |
|
SU994226A2 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
