ye S t i iHi/S 5 i s
Изобретение относится к машиностроению и может быть использовано для очистки, снятия облоя, заусенцев.
Устройство для вибрационной обработки работает следующим образом. При включении электродвигателя 7
шлифовання и полирования деталей гра- вращение посредством упругой муфты 6
5
амплитуда колебаний контей- 15 неуравновешенных грузов 18 и 19 приложены в центрах тяжести сечения Р Pg дебалансных маховиков 1 Г и 12, 11ри этом создается момент М. Hi OsOg где OyOg - расстояние
нулированной средой.
Цель изобретения - интенсификация процесса обработки за счет усложнения формы пространственных колебаний контейнера. 10
На фиг 1 изображено устройство - для вибрационной обработки, общий вид; на фиг, 2 - сечение А-А -на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 2 ; на фиг,
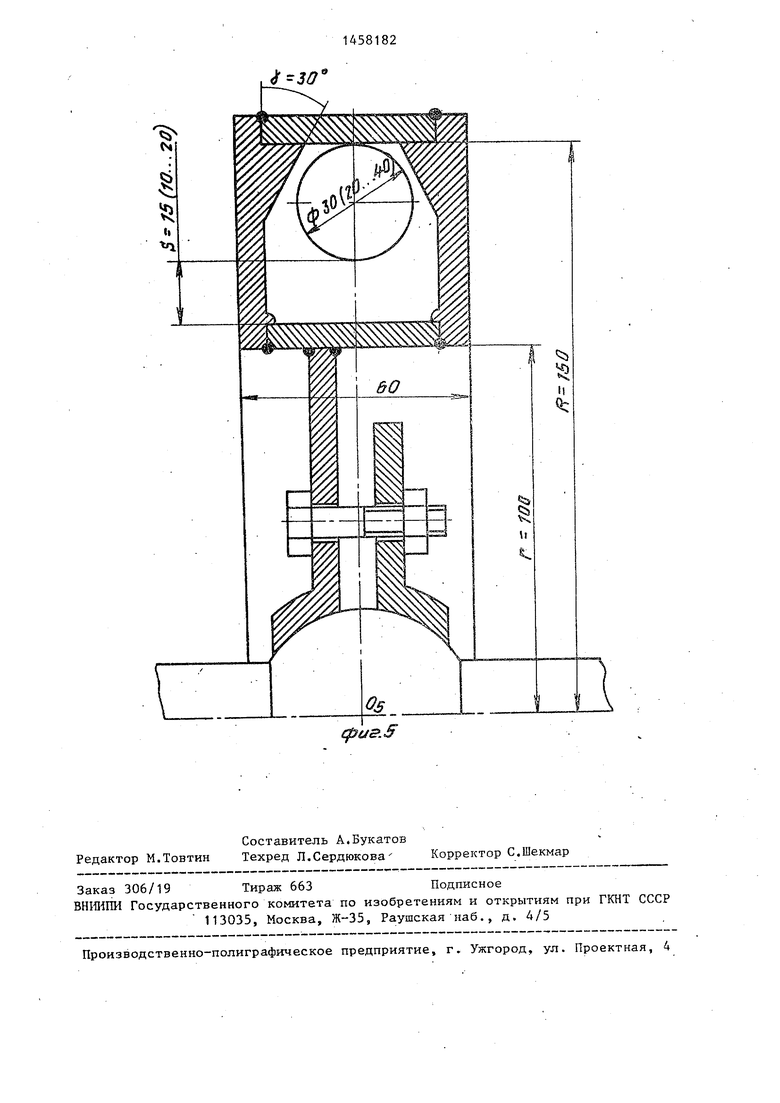
иера; на фиг. 5 - сечение В-Внафиг.З (с копкрети.ыми размерами).
Устройство для вибрационной обра боткп содерлжт основание 1,.рабочий орган (контейнер) 2, установленный ji a основании 1 посредством упругих элементов 3. УстановленныЕЕ в подпшп- - инковых узлах 4 контейнера 2 приводной вал 5 соединен посредством упругой муфты 6 с эогектродвигателем 7. Сферические шарниры 8 и 9 установлены па валу 5, при этом шарнир 9 за- крешхен с помощью болта 10. На шарнирах 8 и 9 установлены вибровозбудите- ли,, вьтолнен1- ые в виде одинаковых ма-30 ховиков 11 и 12, вкл очаю1пр х в себя по два соосных жестко связанных полудиска 13 и 14,
Маховики 11 и 12 установлены с одинаковыми угловыми смещениями к оси вращения вала 5, Полудиски 13 маховиков 11 и 12 выполнены в виде замкнутых кольцевых емкостей 15 и 16, в которых размещены Епарики 17.
На калсдом маховике 11 и 12 уста- 40 новлено по одному дебалансному грузу 18 и 19, размещенному в проекции на
передается валу 5. Направленная вибрация от центробежных сил неуравнове шенных грузов 18 и 19 передается кон тейнеру 2. При этом создается момент но-неуравновешенный дисбаланс, который при вращении вала 5 создает круговой вынужденный вектор-момент, пер пендикулярный вращающейся плоскости
разбаланса. Инерционные силы F
от
20 между центрами крепления маховиков 11 и 12 на оси вала 5. Одновременно от угловых неурав.новешенностей дебалансных маховиков 11 и 12 созда- ется дополнительный знакопеременный
25 момент, действующий в плоскости, перпендикулярной плоскости действия момента М.: .
35
лы, приложенные в центрах тяжести сечений Р, , Р, Р,, Р, дебалансных маховиков 11 и 12. Под действием знакопеременных моментов М| и ., .дей- СТВ5ТОЩИХ одновременно во взаимно перпендикулярных плоскостях, контейнер 2 совершает объемные колебания и дополнительные пространственные колебания, что позволяет интенсифицировать процесс виброобработки.
Шарики 17 при поперечных колебаплоскость, перпендикулярную оси вала, со смещением на 180 друг относительно друга.45 ниях (колебания от неуравновешенных Шарики 17 размещены в каждой .замк- грузов 18 и,19) и при угловых коле- нутой кольцевой емкости таким обра- баниях (колебания от угловых неурав- зом, чтобы при соприкосновении шариков 17 со стенкой 20 маховиков 11 и 12 между шариками 17 не оставалось CQ зазора. Ширина каждой замкнутой кольцевой емкости а 1,25-1,5 d,, где djj - диаметр шарика, Замкнутая кольцевая емкость выполнена в поперечном
55
сечении в виде фигуры, состоящей из прямоугольника и правильной трапеции. Обрабатываемые детали 21 закреплены в контейнере 2 с абразивом с помощью приспособления 22.
новешенностей) взаимодействуют со стенками замкнутой кольцевой емкости 16.
В качестве примера на фиг, 5 даны соотношения геометрических размеров элементов маховиков. Что касается внешних воздействий, порождающих те или иные динамические процессы в этой модели, то как правило, они отображаются кинематическим возбуждением корпуса центробежной силой, порождаемой дебалансом маховика,
Устройство для вибрационной обработки работает следующим образом. При включении электродвигателя 7
вращение посредством упругой муфты 6
вращение посредством упругой муфты 6
неуравновешенных грузов 18 и 19 приложены в центрах тяжести сечения Р Pg дебалансных маховиков 1 Г и 12, 11ри этом создается момент М. Hi OsOg где OyOg - расстояние
передается валу 5. Направленная вибрация от центробежных сил неуравновешенных грузов 18 и 19 передается контейнеру 2. При этом создается момент- но-неуравновешенный дисбаланс, который при вращении вала 5 создает круговой вынужденный вектор-момент, перпендикулярный вращающейся плоскости
разбаланса. Инерционные силы F
от
5
инеуравновешенных грузов 18 и 19 приложены в центрах тяжести сечения Р Pg дебалансных маховиков 1 Г и 12, 11ри этом создается момент М. Hi OsOg где OyOg - расстояние
между центрами крепления маховиков 11 и 12 на оси вала 5. Одновременно от угловых неурав.новешенностей дебалансных маховиков 11 и 12 созда- , ется дополнительный знакопеременный
момент, действующий в плоскости, перпендикулярной плоскости действия момента М.: .
лы, приложенные в центрах тяжести сечений Р, , Р, Р,, Р, дебалансных маховиков 11 и 12. Под действием знакопеременных моментов М| и ., .дей- СТВ5ТОЩИХ одновременно во взаимно перпендикулярных плоскостях, контейнер 2 совершает объемные колебания и дополнительные пространственные колебания, что позволяет интенсифицировать процесс виброобработки.
Шарики 17 при поперечных колебаниях (колебания от неуравновешенных грузов 18 и,19) и при угловых коле- баниях (колебания от угловых неурав-
ниях (колебания от неуравновешенных грузов 18 и,19) и при угловых коле- баниях (колебания от угловых неурав-
новешенностей) взаимодействуют со стенками замкнутой кольцевой емкости 16.
В качестве примера на фиг, 5 даны соотношения геометрических размеров элементов маховиков. Что касается внешних воздействий, порождающих те или иные динамические процессы в этой модели, то как правило, они отображаются кинематическим возбуждением корпуса центробежной силой, порождаемой дебалансом маховика,
31458182
Синхронно с вращением вектора центробежной силы по внутренней поверхности полости дебалакса, периодически ударяясь по ней, движется g динамически йагруженный шарик. Частота и сила этих ударов зависят от параметров системы, в первую очередь от величины зазора. При этом скорость ударов по мере увеличения зазора сие- ю тематически растет, что в свою очередь, ведет к прогрессирующему увеличению зазора
а.-|-ь. п
С
Р
(2)
R - радиус внешней стенки полости дебаланса (фиг.5);
m - масса щарика;
ОЭ - угловая скорость вращения дебаланса;
Р - сила соударения шарика со стенкой полости.
gю 15
С учетом (1) и (2) ния шарика Р равна
сила соудареР
S
(3)

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для вибрационной обработки | 1990 |
|
SU1738612A2 |
| Машина для вибрационной обработки | 1981 |
|
SU971634A1 |
| Устройство для вибрационной обработки | 1989 |
|
SU1634455A1 |
| Устройство для вибрационной обработки | 1984 |
|
SU1175678A2 |
| Машина для вибрационной обработки | 1983 |
|
SU1096007A1 |
| Вибратор устройства для вибрационной обработки | 1986 |
|
SU1313664A1 |
| Виброкаток | 1990 |
|
SU1700127A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДЕЙСТВУЮЩЕЙ СИЛОЙ (ВАРИАНТЫ) И РЕГУЛИРУЕМЫЙ ВИБРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531518C1 |
| ВИБРАЦИОННО-ЦЕНТРОБЕЖНАЯ СОРТИРОВКА | 1973 |
|
SU371981A1 |


Изобретение относится к машиностроению и может быть использовано для очистки, снятия облоя, заусенцев, шлифования деталей гранулированной средой. Изобретение позволяет интенсифицировать процесс.виброобработки за счет усложнения.формы и пространственных колебаний.контейнера. Устройство для вибрационной обработки содержит основание 1, контейнер 2, установленный на основании 1 посредх ством упругих элементов 3. Приводной вал 5, установленный в подшипниковых узлах 4 контейнера 2, соединен с электродвигателем 7, а на нем посредством сферических шарниров 8 и 9 установлены два вибровозбудителя, выполненных в виде одинаковых маховиков 11 и 12, включающих в себя по два соосных жестко связанных полудиска 13 и 14. На каждом маховике 11 и 12 установлены по одному дебалансному грузу 18 и 19. Маховики 11 и 12 установлены на валу 5 под углом ci , а их замкнутые кольцевые емкости 15 и 16 заполнены шариками 17. При вращении маховиков 11 и 12 шарики 17 взаимодействуют с боковыми и наклонными стенками замкнутых кольцевых емкостей 15 и 16 и оказывают дополнительные силовые воздействия на контейнер 2 за счет упругих и отраженных соударений шариков 17 со стенками емкостей .15 и 16. 5 ил. (Л ff S ,.. ел 00 00 to
де
G Я
А„ безразмерный зазор при кинематической возбуждении; зазор в системе; амплитуда гармонических колебаний при кинематическом возбуждении.
Р
0,15 (м) X 0,1 (кг) X 157(-)г X 0,005(м) .„.;..
На тех же режимах неуравновешенный груз массой М 1 кг имеет величину вынуждающей силы
F М - г со
где г - эксцентриситет массы груза относительно оси вращения вала. Приняв г 0,15 м из формулу (5)
получим
F 1 (кг) хО,15 (м) X 157 (-)
3690 (н).
Таким образом, влияние шариков, помещенных в плоскость дебаланса, с учетом (4) и (5), составляет примерно 17% силового воздействия основных неуравновешенных грузов на динамику вибромашины. Следовательно, при правильном подборе геометрических размеров и весовых параметров дебаланса вполне возможно достижение цели интенсификации процесса обработки. Аналогично оценивается влияние шариков при угловых колебаниях дебалансов. Их влияние составляет также 10-20%,
Центры тяжести неуравновешенных грузов 18 и 19 во время вращения заг
Подставим в формулу (3) ные значения (фиг,5): R
m 100 г; мм.
СО 157 --- с
конкрет150 м,
L., 5 мм.
24,6 (н)
(4)
30
нимают соответственно положения Р, , РТ Рб и Р, Р, Р, Pg, при этом пр оисходит или увеличение или небольшое уменьшение сил F , F , Fj. При этом амплитуды колебаний контейнера 2 имеют бигармонический синусоидальный характер за счет уп35 ругих и отраженных соударений шариков 17 со стенками замкнутой кольцевой емкости 16 (фиг,4): кривая 1 - колебания при отсутствии шариков в кольцевой емкости; кривая 2 - ко лебания при наличии шариков в кольце- вбй емкости.
Дополнительно силовые воздействия от взаимодействия шариков 17 в емкостях 15 и 16 маховиков 11 и 12 и дополнительные угловые (крутильные) колебания от угловых неуравновешен- ностей маховиков 11 и 12 увеличивают суммарную амплитуду колебаний (по трем осям кординат) и, следовательно, интенсивность виброобработки.
Выполнение поперечного сечения 55 замкнутой кольцевой емкости с размерами в 1,25-1,5 раза больше диаметра шариков позволяет шарикам двигаться от одной стенки к другой, одновременно предохраняя их от стопорения.
Формула изобретения
Устройство для вибрационной обработки, содержащее основание, упруго установленный на нем рабочий орган, приводной вал с шарнирно установленным на нем маховиком, состоящим из двух соосных жестко связанных полудисков с дебалансным грузом и уста- новленным под углом к оси вала, при этом один полудиск выполнен в виде замкнутой кольцевой емкости, предназначенной для заполнения средой изменяемого объема, с прямоугольным попе- речным сечением, отличающееся тем, что, с целью интенсификации процесса обработки за счет усложфие.2
нения формы пространственных колебаний контейнера, устройство снабжено дополнительным маховиком, установленным параллельно основному, при этом геометрический центр одного из маховиков размещен вьше контейнера, а другой - ниже контейнера, причем балансные грузы маховиков в проекции на плоскость, перпендикулярную оси вала, расположены друг относительно друга со смещением на 180°, а замкнутая ёмкость в каждом из маховиков заполнена шариками, при этом ее поперечное сечение выполнено с сужением в сторону периферии а его размер в радиальном направлении в 1,25-1,5 раза больше диаметра шарика.
Г8
20
IS
16
4, мм
фигЛ
77
r-j
| Машина для вибрационной обработки | 1983 |
|
SU1096007A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
