15
Изобретение относится к машиностроительной и другим металлообрабатывающим отраслям нромышленности и может быть ис- нользовано на операциях очистки и отделки новерхностей деталей гранулированной средой.
Цель изобретения - расширение технологических возможностей путем обеспечения управления во время работы как величиной, так и направлением возмуш,аю- щей силы.
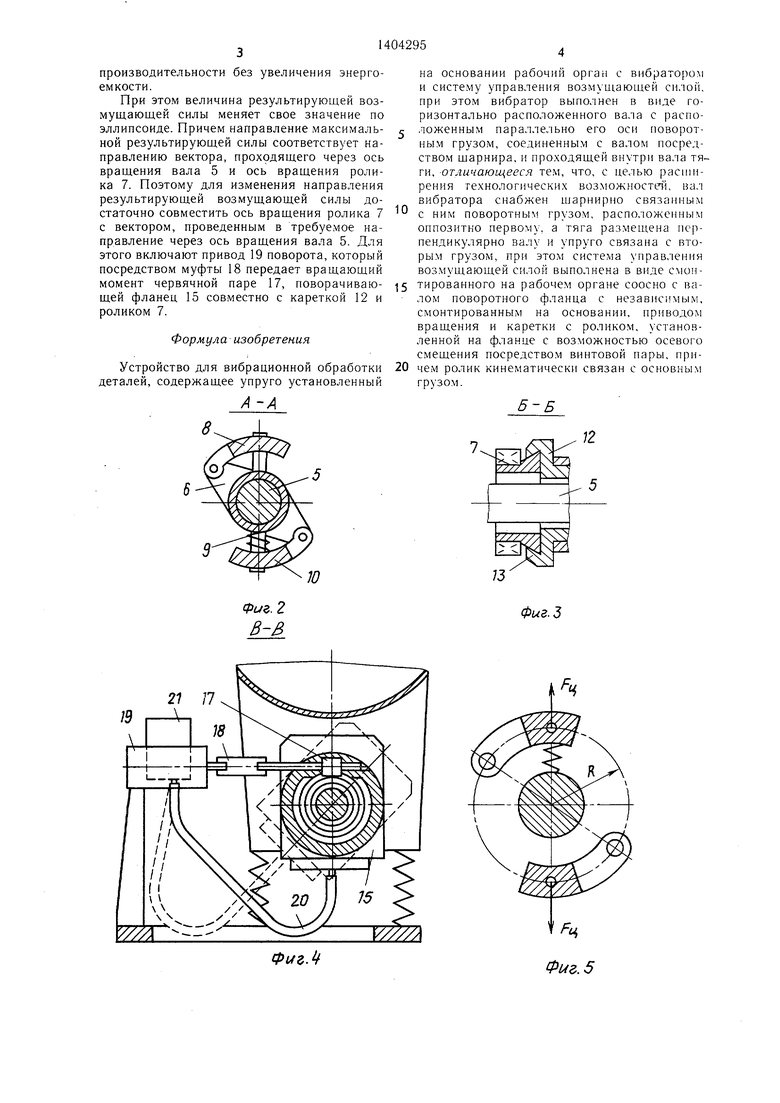
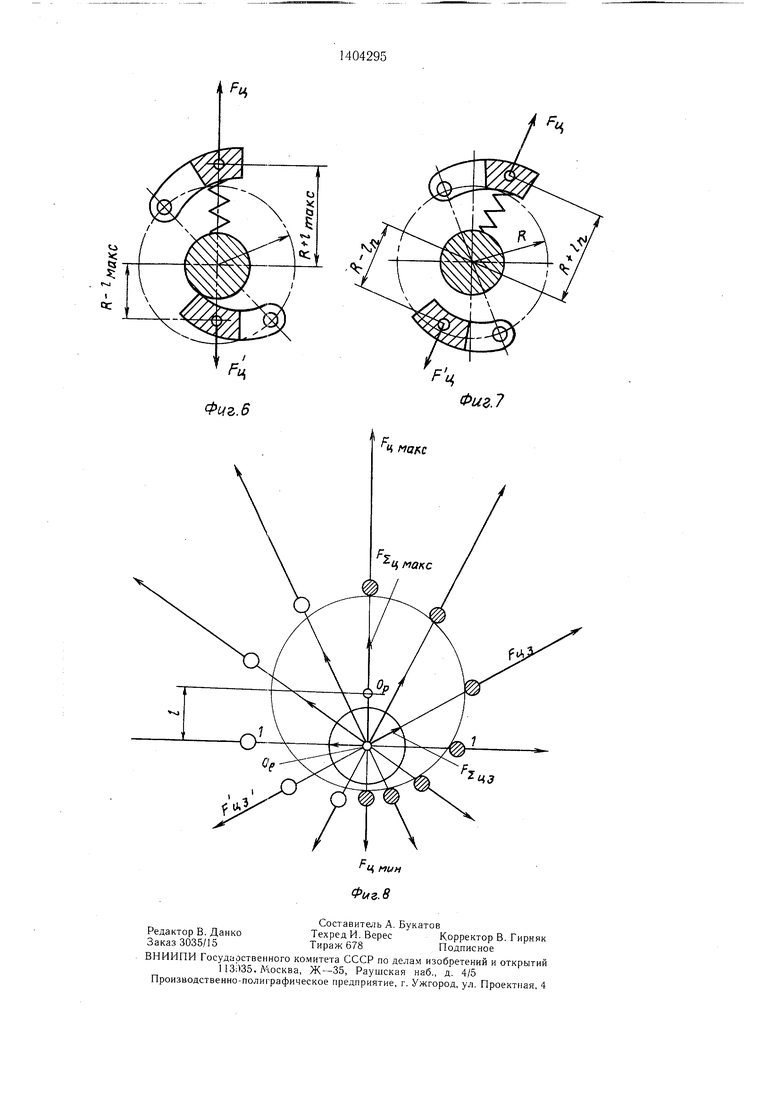
На фиг. 1 изображено устройство, общий вид в поперечном разрезе; ма фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - разрез Б-Б на фиг. I; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - положение деба- лансных грузов, соответствующее нулевой возмущающей силе; на фиг. 6 - положение грузов, соответствующее максимальному значению возмущающей силы, направленной вверх по вертикали; на фиг. 7 - положение грузов, соответствующее одному из промежуточных значений возмуш,ающей силы, направленной под углом вправо к вертикали; на фиг. 8 - схема распределения возмущающих сил.
Вибрационное устройство состоит из ра- ..,- бочего органа, установленного на основании 1 посредством амортизаторов 2, имеющих линейную характеристику жесткости. На основании 1 закреплен привод 3, соединенный гибкой муфтой 4 с валом 5. Вал 5 снабжен проушинами б, в которых с возмож- ностью покачивания укреплены контактирующий с роликом 7 дебалансный груз 8 и под- пр:ужиненный пружинами 9 дебалансный груз 10. Дебалансные грузы 8 и 10 шар- нирно сочленены между собой тягами
изменяет тем самым величину возмущающей силы.
Для управления направлением возмущающей силы включают привод 19 поворота. Этот привод посредством муфты 18 пере- дает крутящий .момент червячной паре 17, которая поворачивает фланец 15 вместе с кареткой 12 и роликом 7 и изменяет тем самым величину возмущающей силы.
Изменения величины и направления воз- 10 мущающей силы происходят следующим образом.
При вращении, вала 5 контактирующий с роликом 7 дебалансный груз 8 (фиг. 1), обкатываясь вокруг ролика 7, совершает относительно его оси движение по орбите, соответствующей профилю ролика 7, например по круговой; Такое же движение совершает и соединенный с ним тяга.ми 11 другой дебалансный груз 10.
Нри совмещении оси вращения вала 5 с 20 осью вращения ролика 7 центры тяжести дебалансных грузов 8 и 10 совершают движение по круговым орбитам относительно оси вращения ролика 7 и оси вращения вала 5 на равных расстояниях R от оси вращения вала 5.
Следовательно, при равенстве масс дебалансных грузов развиваемые ими возмущающие силы уравновешивают друг друга. При смещении оси вращения ролика 7 относительно оси вращения вала 5 возникает эксцентриситет (см. фиг. 8).
Так, например, при смещении оси вращения ролика 7 вверх по вертикали, центры тяжести дебалансных грузов 8 и 10 будут совершать относительно оси вала 5 движение по орбите, отличной от круговой (близкой к
Ролик 7 установлен на полой оси карет- 35 ллипсу). Следовательно, расстояние
их
ки 12. Каретка 12 посредством направляющих 13 и винтовой пары 14 укреплена на фланце 15. Фланец 15 установлен в корпусе 16 и червячной передачей 17 и муфтой 18 кинематически связан с приводом 19
центров тяжести от оси вращения вала 5 будет менять свое значение. При этом дебалансный груз 8 (как это показано на фиг. 8), находясь на вертикали, будет удален от оси вращения вала 5 на максимальное расстояего поворота. Винтовая пара 14 гибким ва- 40 ние, а другой дебалансный груз 10 прибли- лом 20 соединена с приводом 21 перемещения каретки 12.
Устройство работает следующим образом.
Привод 3 посредством гибкой .муфты 4 вращает вал 5. При вращении вала 5 с де- балансными грузами 8 и 10 возникает возмущающая сила. Эта возмущающая сила из-за того, что дебалансные грузы соединены между собой тягами 11, равна разности центробежных сил, развиваемых деба- лансными грузами 8 и 10.
45
зится к оси вращения вала 5 на минимальное расстояние.
Следовательно, результирующая возму щающая сила в этом случае будет равна разности возмущающих сил, развиваемых де- балансными грузами 8 и 10, т.е.
F Fu макс Fu мин
Дебалансные грузы 8 и 10, находясь на горизонтали (прямая I - 1 на фиг. 8), уда- cQ лены от оси вращения вала 5 на равные расстояния, следовательно развиваемые ими возмущающие силы уравновешивают друг друга. Таким образом, за один оборот вала 5 результирующая возмущающая сила Fj;, дважды изменяет свою величину от
Для управления величиной возмущающей силы включают привод перемещения каретки. Этот привод посредством гибкого вала 20 передает крутящий момент винтовой паре 14 и
Дебалансные грузы 8 и 10, находясь на горизонтали (прямая I - 1 на фиг. 8), уда- cQ лены от оси вращения вала 5 на равные расстояния, следовательно развиваемые ими возмущающие силы уравновешивают друг друга. Таким образом, за один оборот вала 5 результирующая возмущающая сила Fj;, дважды изменяет свою величину от
перемещает каретку 12 вместе с роликом 7. 55 минимума до максимума. Следовательно,
Ролик 7, воздействуя на дебалансный груз 8, поворачивает его вместе, с деба- лансным грузом 10 в новое положение и
частота действия возмущающей силы в два раза больше, чем число оборотов вала 5, что обеспечивает дополнительное увеличение
5
- п
изменяет тем самым величину возмущающей силы.
Для управления направлением возмущающей силы включают привод 19 поворота. Этот привод посредством муфты 18 пере- дает крутящий .момент червячной паре 17, которая поворачивает фланец 15 вместе с кареткой 12 и роликом 7 и изменяет тем самым величину возмущающей силы.
Изменения величины и направления воз- 0 мущающей силы происходят следующим образом.
При вращении, вала 5 контактирующий с роликом 7 дебалансный груз 8 (фиг. 1), обкатываясь вокруг ролика 7, совершает относительно его оси движение по орбите, соответствующей профилю ролика 7, например по круговой; Такое же движение совершает и соединенный с ним тяга.ми 11 другой дебалансный груз 10.
Нри совмещении оси вращения вала 5 с 0 осью вращения ролика 7 центры тяжести дебалансных грузов 8 и 10 совершают движение по круговым орбитам относительно оси вращения ролика 7 и оси вращения вала 5 на равных расстояниях R от оси вращения вала 5.
Следовательно, при равенстве масс дебалансных грузов развиваемые ими возмущающие силы уравновешивают друг друга. При смещении оси вращения ролика 7 относительно оси вращения вала 5 возникает эксцентриситет (см. фиг. 8).
Так, например, при смещении оси вращения ролика 7 вверх по вертикали, центры тяжести дебалансных грузов 8 и 10 будут совершать относительно оси вала 5 движение по орбите, отличной от круговой (близкой к
их
ллипсу). Следовательно, расстояние
центров тяжести от оси вращения вала 5 будет менять свое значение. При этом дебалансный груз 8 (как это показано на фиг. 8), находясь на вертикали, будет удален от оси вращения вала 5 на максимальное расстояние, а другой дебалансный груз 10 прибли-
40 ние, а другой дебалансный груз 10 прибли-
45
зится к оси вращения вала 5 на минимальное расстояние.
Следовательно, результирующая возмущающая сила в этом случае будет равна разности возмущающих сил, развиваемых де- балансными грузами 8 и 10, т.е.
F Fu макс Fu мин
Дебалансные грузы 8 и 10, находясь на горизонтали (прямая I - 1 на фиг. 8), уда- лены от оси вращения вала 5 на равные расстояния, следовательно развиваемые ими возмущающие силы уравновешивают друг друга. Таким образом, за один оборот вала 5 результирующая возмущающая сила Fj;, дважды изменяет свою величину от
минимума до максимума. Следовательно,
частота действия возмущающей силы в два раза больше, чем число оборотов вала 5, что обеспечивает дополнительное увеличение
производительности без увеличения энергоемкости.
При этом величина результирующей возмущающей силы меняет свое значение по эллипсоиде. Причем направление максимальной результирующей силы соответствует направлению вектора, проходящего через ось вращения вала 5 и ось вращения ролика 7. Поэтому для изменения направления результирующей возмущающей силы достаточно совместить ось вращения ролика 7 с вектором, проведенным в требуемое направление через ось вращения вала 5. Для этого включают привод 19 поворота, который посредством муфты 18 передает вращающий момент червячной паре 17, поворачивающей фланец 15 совместно с кареткой 12 и роликом 7.
Формула изобретения
Устройство для вибрационной обработки деталей, содержащее упруго установленный
А-А 80
на основании рабочий орган с вибратором и систему управления возмущающей силой, при этом вибратор выполнен в виде горизонтально расположенного вала с расположенным параллельно его оси поворотным грузом, соединенным с валом посредством щарнира, и проходящей внутри вала тяги, отличающееся тем, что, с целью рения технологических возможностет. вал вибратора снабжен шарнирно связанным с ним поворотным грузом, расположенным оппозитно первому, а тяга размещена перпендикулярно валу и упруго связана с вторым грузом, при этом система управления возмущающей силой выполнена в виде смон- тированного на рабочем органе соосно с валом поворотного фланца с независ1 мым, смонтированным на основании, приводом вращения и каретки с роликом, установленной на фланце с возможностью осевого смещения посредством винтовой пары, причем ролик кинематически связан с основным грузом.
5-Б
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вибрационной обработки | 1985 |
|
SU1281381A1 |
| Устройство для вибрационной обработки | 1987 |
|
SU1509233A1 |
| Вибровозбудитель | 1987 |
|
SU1569037A1 |
| Устройство для механической обработки волокнистых материалов | 1986 |
|
SU1428770A1 |
| Устройство для резания пищевого продукта | 1986 |
|
SU1500238A1 |
| ИНЕРЦИОННЫЙ ЦЕНТРОБЕЖНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2034170C1 |
| Лесопосадочная машина | 1988 |
|
SU1510753A1 |
| Вибровозбудитель | 1986 |
|
SU1676669A1 |
| ИНЕРЦИОННЫЙ ВИБРАТОР С ВЫДВИЖНЫМ ДЕБАЛАНСОМ | 1971 |
|
SU298515A1 |
| Грохот инерционный | 1975 |
|
SU735325A1 |
изобретение относится к машиностроительной и другим металлообрабатывающим отраслям промышленности и может быть использовано на операциях очистки и отделки поверхностей деталей гранулированной средой. Целью изобретения является расширение технологических возможностей путем обеспечения управления во время работы как величиной, так и направлением возмущаюшей силы. Устройство содержит вибратор, выполненный в виде вала 5 с двумя поворотными грузами 8 и 10, соединенными между собой тягами 11 с обеспечением синхронного углового смешения. Система управления содержит ролик 7, установленный с возможностью осевого смещения, что обеспечивает плавную регулировку величины возмущающей силы. Установка ролика 7 на поворотном фланце 15 обеспечивает плавное изменение направления возмущающей силы. 8 ил. S сл 4 го со Сл 2S 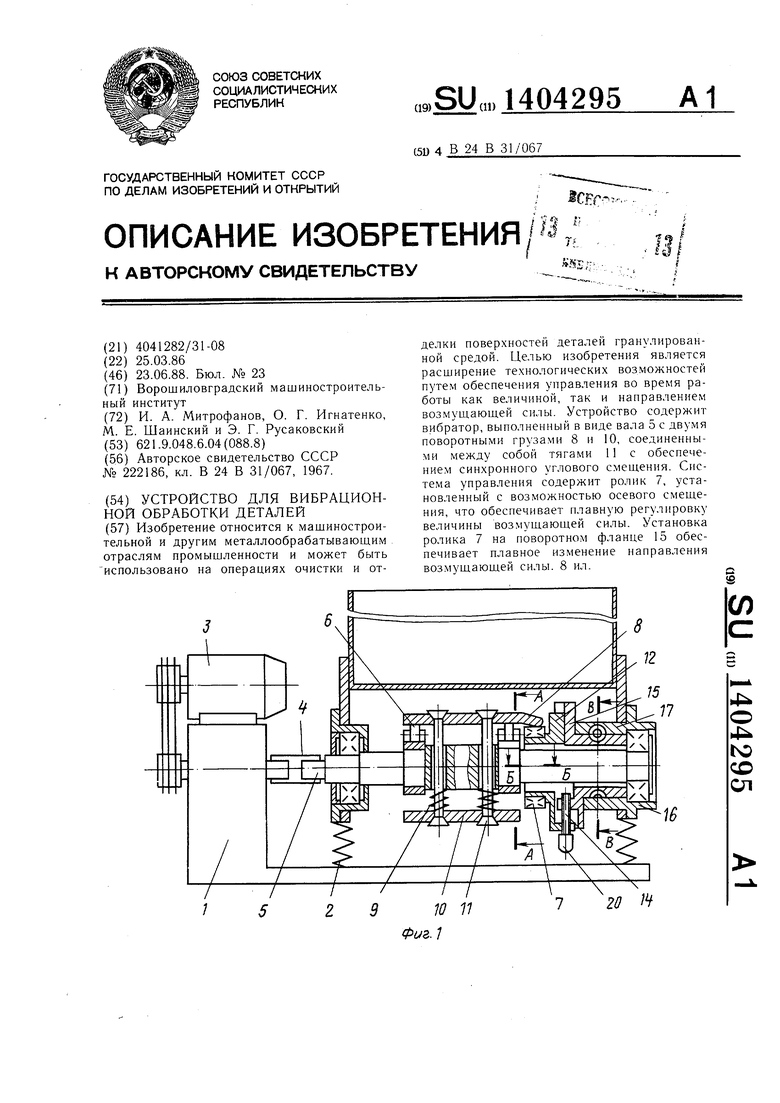
Фиг. 2 В-В
Фиг.
Фиг.З
,
Фцг.6
Фиг.7
| ВИБРАЦИОННАЯ МАШИНА ДЛЯ ШЛИФОВАНИЯ, ПОЛИРОВАНИЯ И ОЧИСТКИ ДЕТАЛЕЙ | 0 |
|
SU222186A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
