11
Изобретение относится к робототехнике, а именно к системам очувствления захвата исполнительного механизма манипулятора, работающего, например, в экстремальных условиях - пожароопасных и химически агрессивных средах, и является усовершенствованием известного устройства по авт.св. № 929432,
Целью изобретения является расширение технологических возможностей захвата манипулятора путем обеспечения автоматического ориентирования деталей при сборке комплекта.
2814052
требуемая величина давления в эластичной оболочке. Таким образом, для каждого типа детали 10 и ее положения в захвате находится соответст- 5 вие величин сигналов датчиков 6 и давления в эластичных оболочках, Эта информация заносится в блок 9 ло гики, чем и осуществляется настройка захвата на работу с заданным на- tO бором деталей разных типов. Кроме
того, в процессе работы по изменению емкости отдельных секций блочных конденсаторов 6 можно измерять проскальзывание детали в губках захвата
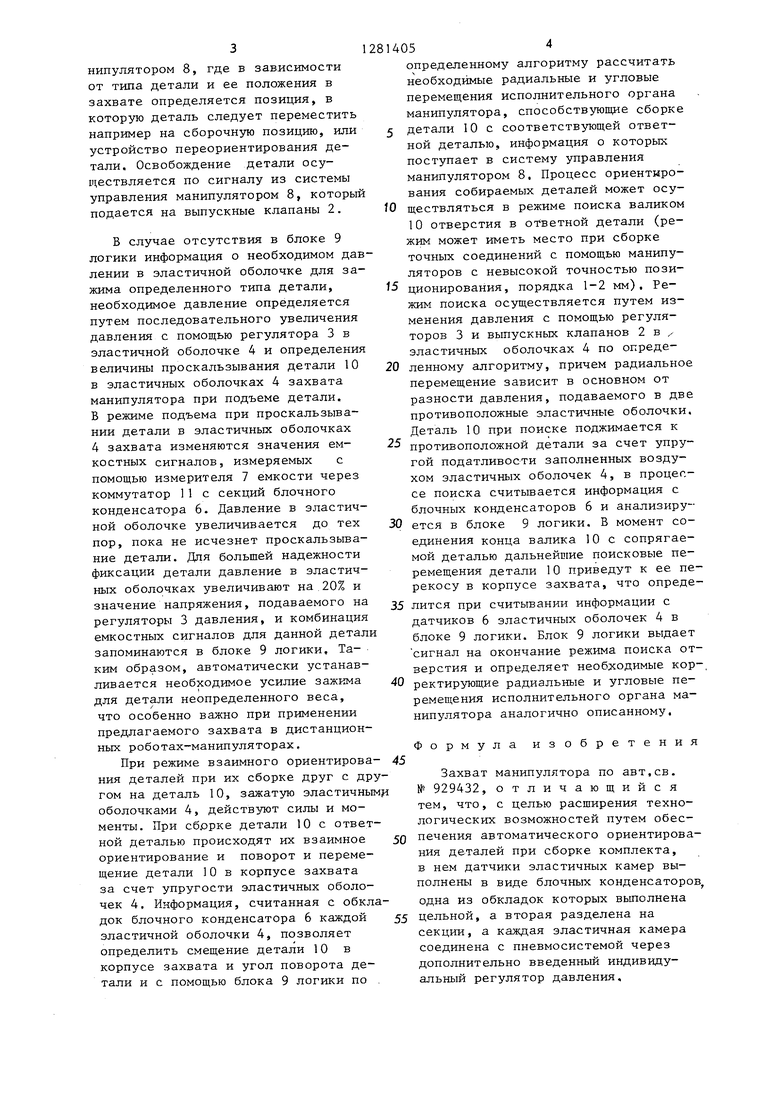
Ка фиг, 1 изображен пневматический и соответственно регулировать необзахват манипулятора; на фиг,2 - сечение А-А на фиг,1,
Пневматический захват манипулятора состоит из основания 1 с подводящим штуцером, соединенным с пневмо- системой, выпускных клапанов 2 и регуляторов 3 давления, выполненных в виде управляемых электромагнитных клапанов, каждый из которых соедине с соответствующей эластичной камерой (оболочкой) 4 с помощью соединительных каналов 5, обкладок оболочного конденсатора 6, которые выполнены из металлизированной синтетической пленки. Пневматический захват манипулятора через измерител 7 емкости связан с системой управления манипулятора 8 и блоком 9 логики. Информация о положении и ориентации валика 10, зажатого эластичными оболочками 4, снимается с помощью коммутатора 11, который поочередно может подключать к измерителю 7 емкости блочные конденсаторы в каждой эластичной камере, а также отдельные секции блочного конденсатора 6, который выполнен таким образом, что одна обкладка 6 его цельная, а вторая обкладка 12 разделена на группу секций.
45 логики. Поскольку каждому из типов деталей соответствует определенный набор величин сигналов с датчиков, то в блоке логики определяются тип детали, ориентация ее в захУстройство работает следующим образом.
Имеются два режима работы захвата манипулятора:режим захвата и пе- 50 вате и вырабатываются управляющие реноса детали и режим взаимного ори-сигналы для открытия регуляторов 3 ентирования деталей при их сборкедавления и соединения эластичных обо- друг с другом, В первом режиме долочек 4 с помощью соединительных ка- начала работы с деталями для каждогоналов 5 с пневмосистемой, что позво- конкретного их типа и положения в зах- 55 ляет сформировать в оболочках захвата вате определяются величины сигналовтребуемое для детали данного типа си- емкостных датчиков 6, Для каждоголовое давление (усилие захвата), типа деталей в зависимости от веса.Кроме того, сигнал блока 9 логики прочности и т.д, рассчитываетсяподается в систему управления ма814052
требуемая величина давления в эластичной оболочке. Таким образом, для каждого типа детали 10 и ее положения в захвате находится соответст- 5 вие величин сигналов датчиков 6 и давления в эластичных оболочках, Эта информация заносится в блок 9 логики, чем и осуществляется настройка захвата на работу с заданным на- tO бором деталей разных типов. Кроме
того, в процессе работы по изменению емкости отдельных секций блочных конденсаторов 6 можно измерять проскальзывание детали в губках захвата
и соответственно регулировать необходимую для зажима деталей величину давления в эластичных оболочках 4,
В рабочую зону манипулятора, нап20 ример, на ленте транспортера подаются детали 10 нескольких типов, каждую из которых в соответствии с ее назначением необходимо сориентировать и переместить в пози25 цию. Для этой цели основание 1 захвата с эластичными оболочками 4при отсутствии силового давления в оболочках надевается на деталь 10 и от пневмосистемы через подводящий шту30 пер и регуляторы 3 давления, соединительные каналы 5 в эластичные оболочки 4 подается минимальное давление, необходимое для того, чтобы секции эластичной оболочки вступили
35 в контакт с деталью 10, При этом за счет изменения взаимного расположения обкладок блочногб конденсатора 6,,одна из обкладок которого выполнена цельной, а вторая обкладка 12
40 разделена на группу секций, изменяется емкость последних, которая измеряется с помощью коммутатора 1I измерителя 7 емкости. Сигналы с измерителя 7 емкости подаются в блок 9
45 логики. Поскольку каждому из типов деталей соответствует определенный набор величин сигналов с датчиков, то в блоке логики определяются тип детали, ориентация ее в зах50 вате и вырабатываются управляющие сигналы для открытия регуляторов 3 давления и соединения эластичных обо лочек 4 с помощью соединительных ка- налов 5 с пневмосистемой, что позво- 55 ляет сформировать в оболочках захват требуемое для детали данного типа си ловое давление (усилие захвата), Кроме того, сигнал блока 9 логики подается в систему управления манипулятором 8, где в зависимости от типа детали и ее положения в захвате определяется позиция, в которую деталь следует переместить например на сборочную позицию, или устройство переориентирования детали. Освобождение детали осуществляется по сигналу из системы управления манипулятором 8, которы подается на выпускные клапаны 2.
В случае отсутствия в блоке 9 логики информация о необходимом давлении в эластичной оболочке для зажима определенного типа детали, необходимое давление определяется путем последовательного увеличения давления с помощью регулятора 3 в эластичной оболочке 4 и определения величины проскальзывания детали 10 в эластичных оболочках 4 захвата манипулятора при подъеме детали, В режиме подъема при проскальзывании детали в эластичных оболочках 4 захвата изменяются значения емкостных сигналов, измеряемых с помощью измерителя 7 емкости через коммутатор 11 с секций блочного конденсатора 6. Давление в эластичной оболочке увеличивается до тех пор, пока не исчезнет проскальзывание детали. Для большей надежности фиксации детали давление в эластичных оболочках увеличивают на 20% и значение напряжения, подаваемого на регуляторы 3 давления, и комбинация емкостных сигналов для данной детал запоминаются в блоке 9 логики. Таким образом, автоматически устанавливается необходимое усилие зажима для детали неопределенного веса, что особенно важно при применении предлагаемого захвата в дистанционных роботах-манипуляторах.
При режиме взаимного ориентирования деталей при их сборке друг с дргом на деталь 10, зажатую эластичны оболочками 4, действзпот силы и моменты. При сбррке детали 10 с ответной деталью происходят их взаимное ориентирование и поворот и перемещение детали 10 в корпусе захвата за счет упругости эластичных оболочек 4, Информация, считанная с обклдок блочного конденсатора 6 каждой эластичной оболочки 4, позволяет определить смещение детали 10 в корпусе захвата и угол поворота детали и с помощью блока 9 логики по
2814054
определенному алгоритму рассчитать необходимые радиальные и угловые перемещения исполнительного органа манипулятора, способствующие сборке
5 детали 10 с соответствующей ответной деталью, информация о которых поступает в систему управления манипулятором 8. Процесс ориентирования собираемых деталей может осуfO ществляться в режиме поиска валиком 10 отверстия в ответной детали (режим может иметь место при сборке точных соединений с помощью манипуляторов с невысокой точностью пози 5 ционирования, порядка 1-2 мм). Режим поиска осуществляется путем изменения давления с помощью регуляторов 3 и выпускных клапанов 2 в х эластичных оболочках 4 по опреде20 ленному алгоритму, причем радиальное перемещение зависит в основном от разности давления, подаваемого в две противоположные эластичные оболочки. Деталь 10 при поиске поджимается к
25 противоположной детали за счет упругой податливости заполненных воздухом эластичных оболочек 4, в процессе поиска считывается информация с блочных конденсаторов 6 и анализиру30 ется в блоке 9 логики, В момент соединения конца валика 10 с сопрягаемой деталью дальнейшие поисковые перемещения детали 10 приведут к ее перекосу в корпусе захвата, что опреде35 лится при считывании информации с датчиков 6 эластичных оболочек 4 в блоке 9 логики. Блок 9 логики выдает сигнал на окончание режима поиска отверстия и определяет необходимые кор-, ректирующие радиальные и угловые перемещения исполнительного органа манипулятора аналогично описанному.
40
Формула изобретения
Захват манипулятора по авт.ев, № 929432, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения автоматического ориентирования деталей при сборке комплекта, в нем датчики эластичных камер выполнены в виде блочных конденсаторов одна из обкладок которых выполнена цельной, а вторая разделена на секции, а каждая эластичная камера соединена с пневмосистемой через дополнительно введенный индивидуальный регулятор давления.
-1
Физ.г
Редактор А.Гратилло
Составитель С.Новик Техред В.Кадар
Заказ 7201/11 Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д,4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная,4
Корректор 0.Луговая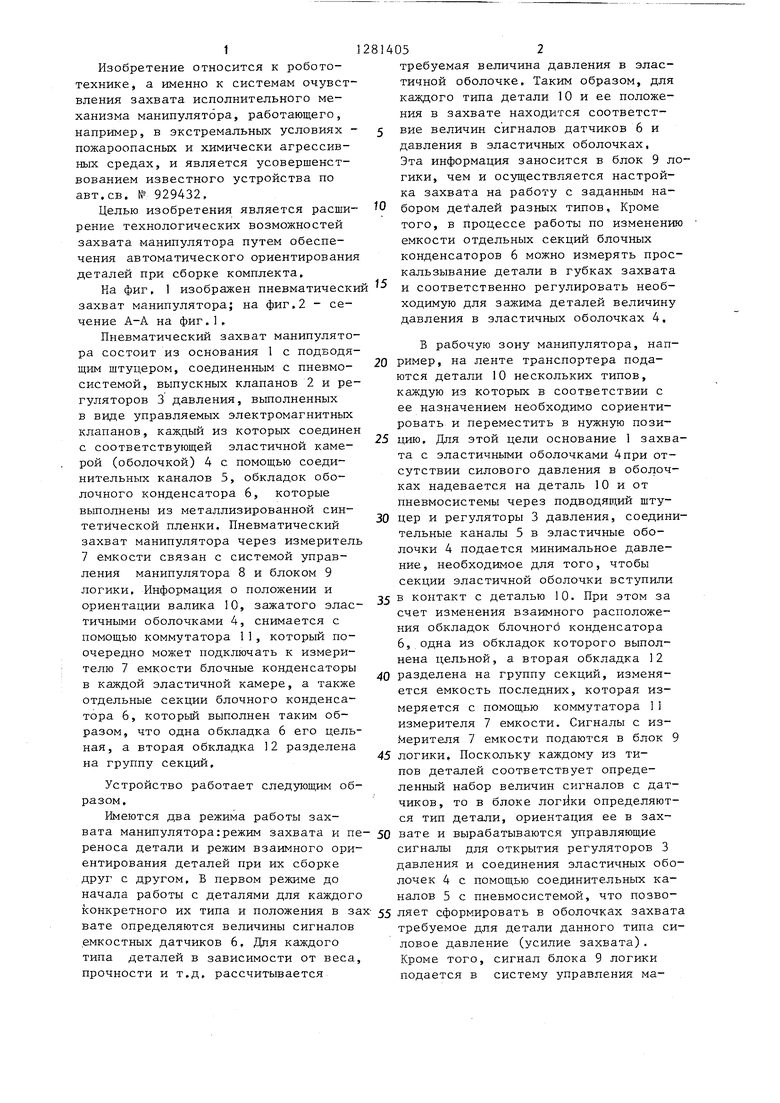
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU929432A1 |
| Пневматический захват | 1979 |
|
SU795941A1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКИХ И СЫПУЧИХ СРЕД В РЕЗЕРВУАРАХ | 2023 |
|
RU2805766C1 |
| Датчик влажности | 2018 |
|
RU2672814C1 |
| ДИСКРЕТНЫЙ ЁМКОСТНЫЙ УРОВНЕМЕР | 2023 |
|
RU2808936C1 |
| Схват очувствленного манипулятора | 1984 |
|
SU1252168A1 |
| Стенд для испытания манипуляторов доения | 1989 |
|
SU1625452A1 |
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Устройство для измерения контактного давления в уплотнении | 1981 |
|
SU945684A1 |
| Рука манипулятора | 1980 |
|
SU982896A2 |

Изобретение относится к робототехнике, а именно к системам очувствления захвата исполнительного механизма манипулятора, работающего, например, в экстремальных условиях. Целью изобретения является расширение технологических возможностей путем обеспечения автоматического ориентирования деталей при сборке комплекта. Для этого в захвате манипулятора датчики эластичных камер выполнены в виде блочных конденсаторов, одна из обкладок 6 каждого выполнена цельной, а другая обкладка 12 разделена на секции. Причем каждая эластичная камера (оболочка) 4 соединяется с пневмо- системой через индивидуальный регулятор давления. 2 ил. S (О (Л ОС ел ю фиг.1
| Захват манипулятора | 1980 |
|
SU929432A1 |
