Изобретение ом нс сится к роПото- технико и может быть использовано в конструкш ях адаптивных роботов, при спогаблираюпшхгя к весу зяхватывае- мых деталей.
Цо.пью изобретения является обеспечение надежности работы охвата за счет иьпиитнения чунствительного эле- мента датчика проскальзывания бесконтактным.
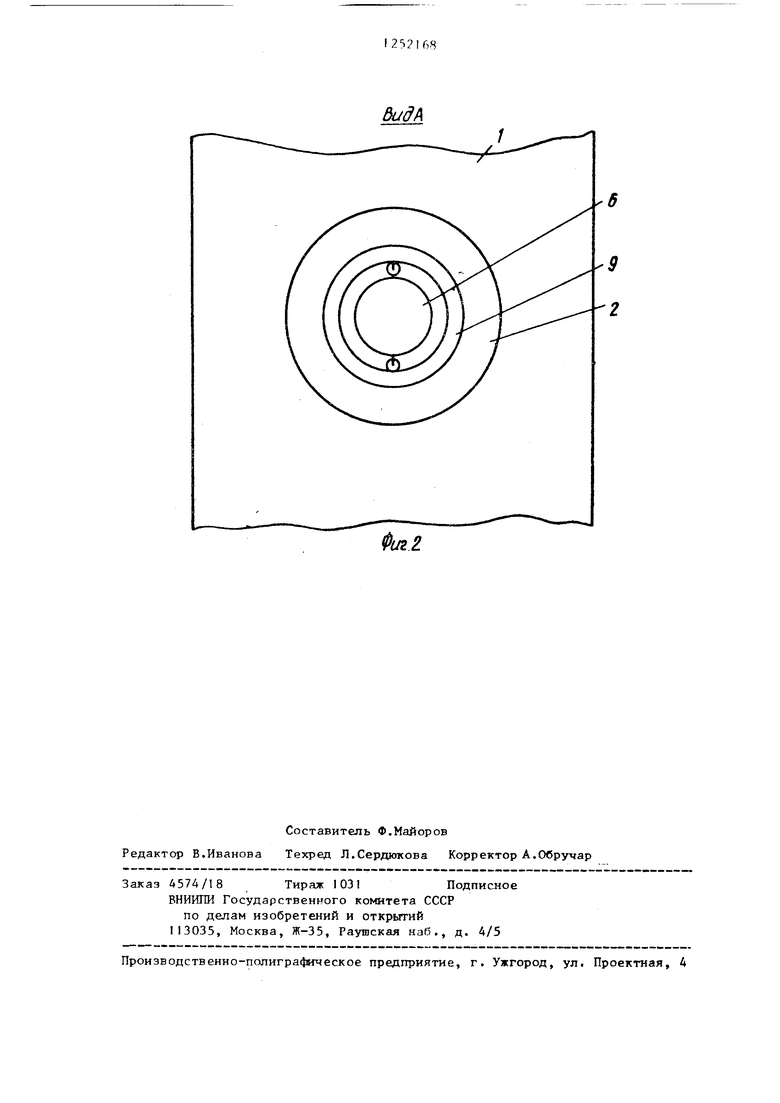
На фиг.1 изображена губка с датчиком проскальзывания и схема устрой ства для коррек Ц1и усилия сжатия губок-, на ( . 2 - вид А пя ( , 1 .
Схват содержит губки I с приводом их перемеп1ения (не показан),, по крайней мере в одной из которых выполнен паз 2 с конической поверхностью, внутри которого расположен датчик проскальзывания детали, состоящий из стеряшя 3, один конец которого через упругий элемент 4 связан с губкой 1, наконечника 5, рабочая поверхность 6 которого вьтолнена из эластичного материала, и который через пружину 7 связан с другим концом стержня 3, и конденсатора, обкладки 8 и 9 которого расположены соответственно на наружной поверхности стержня 3 и внутренней поверхности паза 2.
Кроме того схват содержит устройство для коррекции усилия сжатия губок, включающее соединенные последовательно измерительный блок 10, детектор 1 ) и аналого-ц 1фровой преобразователь 12, при этом вход измерительного блока 10 соединен с конденсатором, а выход аналого-цифрового преобразователя 2 - с приводом губок схвата.
Схват оЧувствленного манипулятор работает следующим образом.
0
5
1 Hi xcvuioM согтоннии наконечни S г помощью пружины 7 удерживается над поверхно(-тью губки 1 , а упругий (. frr 4 удерживает стержень 3 в тлком положении, что его продольная ось перпендикулярна поверхности губки. При захнатьгоании детали ее по- верхпость приходит в соприкосновение с накопечником 5, пружина 7 сжимается и наконе тик 5 утапливается в пазу 2, Если при пробном движении схвата деталь начинает проскальзывать, то вследствие сил трения между поверхностью детали и рабочей поверхностьн) 6 стержень 3 отклоняется по ходу проскальзывания детали, при чтом обкладка конденсатора изменяет твое положение относительно обкладки 9. Это в свою очередь при- 1и1дит к изменению электрической емкости копденса ора, которое регистрируется измерительным блоком 10. Изменение напряжения на выходе измерительного бл1)ка 10, пропорцио- )1альное изменению электрической емкости конденсатора, детектируется детектором 11 и поступает на вход аналог о-лдтфрокого преобразователя 12. Изменение напряжения вызьшает изменение аналого-щ1 })рового преобразователя 12, на выходе которого п;)п :jTOM формируются тактовые импульсы. Тактовые импульсы поступают на и ход П7JИвoдa, где при наличии пер- 5 вого же тактового импульса формируется сигнал для увеличения сдавливающего усилия. Если величины сдавли- ваюшет о недостаточно для удержания д€та.пи, то на следующем шаге все операции повторяются. Процесс- адаптап.ии захвата к весу детали осу- ui,ec i вляется до тех пор, пока не будет обеспечено сжимаюшее усилие, достаточное для удержания детали.
5
0
40
5udf
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| Измерительный схват промышленного робота | 1984 |
|
SU1278204A1 |
| Схват очувствленного робота | 1984 |
|
SU1232475A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Схват промышленного робота | 1984 |
|
SU1291389A1 |

В
Составитель Ф.Майоров Редактор В.Иванова Техред Л.Серднжова Корректор А.Обручар
Заказ 4574/18Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий П3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Фиъг
| Козырев Ю.Г | |||
| Промьшшенные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Трансляция, предназначенная для телефонирования быстропеременными токами | 1921 |
|
SU249A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
