1
(61) 1717340 (21)4788147/08 (22)31.01.90 (46)15.10.92. Бюл. №38 (75) Г. М. Хачатрян
(56)Авторское свидетельство СССР № 1717340, кл. В 25 J 15/00, 1989. (54) ЗАХВАТНОЕ УСТРОЙСТВО
(57)Изобретение относится к машиностроению, а именно к захватным устройствам, предназначенным для использования в промышленных роботах, в частности для сборочных работ. Целью изобретения является расширение функциональных возможностей. Устройство смонтировано на руке 1
манипулятора и содержит корпус 2 с отверстием для подвода сжатого воздуха. Упругий элемент 4 выполнен из эластичного материала и содержит отверстие 5. Концы элемента 4 закреплены на корпусе 2 съемной крышкой 7. Датчики 9 деформации закреплены на соответствующих чувствительных элементах 8, выполненных в виде плоских пружин, консольно и ради- ально установленных на корпусе 2. Свободные концы пружин сходятся к краям глухого отверстия 5 упругого элемента 4.При захвате детали элементы 8 изгибаются и по сигналам с датчиков 9 можно определить положение детали, ее диаметр и вес. 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленное захватное устройство | 1990 |
|
SU1808693A1 |
| Захват манипулятора | 1985 |
|
SU1281405A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| Захватное устройство | 1989 |
|
SU1743853A2 |
| Захватное устройство конструкции Г.М.Хачатряна и С.А.Новоселова | 1988 |
|
SU1537530A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1468743A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |

4
(Л
С
vi о о со
00
со
ю
8
Изобретение относится к машиностроению, а именно к захватным устройствам, предназначенным для использования в промышленных роботах, в частности для сборочных работ.
Целью изобретения является расширение функциональных возможностей путем очувствления захватного устройства.
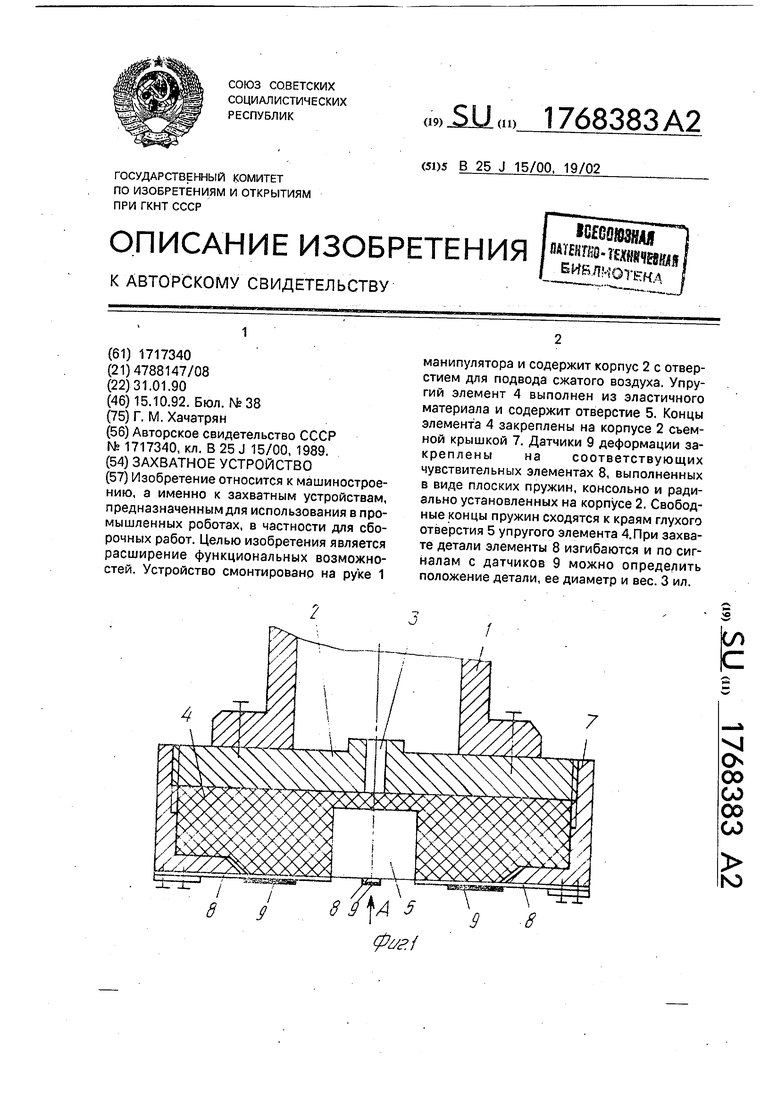
На фиг. 1 изображено захватное устройство, разрезгЯ гГфиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3-устройство с захвачен ной деталью при,вы полне нми сборочной операции.-.
Захватное устройство, смонтированное на руке 1 манипулятора, содержит корпус 2, выполненный в виде диска с отверстием 3 для подвода сжатого воздуха и упругий элемент 4, выполненный в виде плоской круглой пластины - диска из эластичного материала, например резины, с глухим от- верстием 5, выполненным со стороны поверхности соприкосновения с деталью 6. Края упругого элемента 4 закреплены на корпусе 2 крышкой 7, на которой консольно и радиально установлены чувствительные элементы 8, выполненные в виде плоских пружин с фиксированными на них соответствующими датчиками 9 деформации, например тензорезисторами. Свободные концы чувствительных элементов 8 сходят- ся к краям глухого отверстия 5 упругого элемента 4.
Работа захватного устройства осуществляется следующим образом.
Рука манипулятора 1 устанавливает за- хватное устройство в положение, в котором ось глухого отверстия 5 совпадает с осью детали 6. При этом включается подача сжатого воздуха, который поступая через отверстие 3 воздействует на упругий резиновый элемент 4, и деформирует его наружу вместе с чувствительными элементами 8 и датчиками 9. В результате этого боковая поверхность отверстия 5 растягивается и его диаметр увеличивается.
При этом сигналы на выходах датчиков 9 характеризуют степень деформированно- сти упругого элемента 4, а следовательно, и величину диаметра растянутого отверстия 5, позволяя определить факт готовности ус- тройства к процессу захватывания детали конкретного размера. Рука 1 манипулятора опускает устройство и деталь 6 входит в растянутое глухое отверстие 5. После этого воздух стравливается, упругий элемент 4 вместе с чувствительными элементами 8 возвращается в исходное положение, и боковые стенки глухого отверстия 5 плотно схватывают деталь 6. При этом чувствительные элементы 8, упираясь своими свободными концами в боковую поверхность захваченной детали 6, размер которой больше размера недеформированного глухого отверстия 5, и не имея возможности полностью выпрямиться, остаются (вместе с датчиками 9) в определенном деформированном состоянии. В систему управления (не показана) поступают электрические сигналы, соответствующие величине сопротивлений датчиков 9 - тензорезисторов. При этом величины сигналов зависят от степени деформированности чувствительных элементов 8 и характеризуют размер участка детали 6, взятого устройством. Эти же сигналы определяют факт наличия детали в захвате.
Для обеспечения надежности захвата и исключения вибраций детали 6 при манипулировании отверстие 3 перекрывается или подключается к источнику вакуума. При этом обеспечивается надежное прижатие поверхности упругого элемента 4 к поверхности корпуса 1.
Процесс освобождения детали происходит в обратном порядке. При выполнении, например, сборочной операции вставление, в случае неточного подвода устройства манипулятором к ответной детали 10, на деталь 6, зажатую боковыми стенками глухого отверстия 5 упругого элемента 4, со стороны последней действуют силы и моменты, что приводит к ее перекосу (повороту) и определенному ориентированию по отношению к ответной детали 10. Поворот захваченной детали б под действием сил реакций со стороны ответной детали 10 осуществляется за счет имеющейся некой упру- гой податливости устройства, что увеличивается при отключении источника вакуума или открытии отверстия 3 корпуса 1. Перекос детали 6 на ту или иную сторону сопровождается надавливанием ее боковой поверхностью на конец (кбнцы) встречного (их)чувствительного элемента (чувствительных элементов) 8 и увеличиванием его (их) деформированности. При этом противоположный чувствительный элемент (противоположные чувствительные элементы) выпрямляется (ются), Информация считанная с датчиков 9 каждого чувствительного элемента 8 позволяет определить величину угла и направление поворота детали бис помощью соответствующего блока системы управления по определенному алгоритму рассчитать необходимые радиальные и угловые перемещения руки 1 манипулятора, способствующие надежной сборке детали 6 с ответной деталью 10. Процесс активного самокорректирования продолжается до выравнивания значений
сигналов всех датчиков 9 деформаций, после чего рука 1 манипулятора опускает устройство и деталь 6 входит без заклинивания опускает устройство и деталь 10.
При выполнении корпуса 1 с углублением со стороны поверхности соприкосновения с упругим элементом 4 и регулируя давлением воздуха в образовавшейся полости, можно регулировать и одновременно произвести измерение усилия зажатия детали.
При удержании захваченной детали (особенно массивных) в горизонтальном положении можно определить ее вес.
Имеется возможность определения формы (или отклонения формы) захваченной детали. Если захвачена деталь с отклонением формы (например, вместо круглой формы имеется некоторая овальность), то чувствительные элементы 8 подвергаются не одинаковой деформации, а сигналы, поступающие с соответствующих тензорези- сторов 9, характеризуют форму (или степень ее отклонения) первой.
Система очувствления устройства по- зволяеттакже обнаруживать факт проскальзывания (выскальзывания) захваченной детали. Если в процессе манипулирования произойдет проскальзывание детали (выскальзывание из отверстия 5), то она (деталь) уводит за собой свободные концы чувствительных элементов 8 (находящихся с деталью во взаимном механическом контакте), изменяя состояние их деформированно- сти. Это приведет к изменению сигналов на выходах датчиков 9, позволяя обнаруживать факт проскальзывания (выскальзывания) за9
0
5
хваченной детали. На основе этих сигналов может быть откорректирована (увеличена) величина усилия зажатия детали для предотвращения дальнейшего ее проскальзывания. Количество чувствительных элементов может быть различным.
Возможны различные варианты и формы выполнения свободных концов чувствительных элементов, обеспечивающих надежность их взаимодействия с захваченной деталью.
Предлагаемое устройство можно использовать для оснащения промышленных роботов, работающих в составе сборочных робототехнических комплексов. При этом данный промышленный робот получит возможность пр ои ЗШе 6тй точное измерение размера захваченной детали в определенном диапазоне их изменения, определить 0 ее вес, форму (или отклонения формы), усилие зажатия, обнаруживать факты готовно- сти захватного устройства к процессу захватывания, наличия или отсутствия детали в захвате, проскальзывания детали, а также произвести сборочные операции на основе силовой обратной связи.
Формула изобретения
Захватное устройство по авт. св. № 1717340, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено плоскими пружинами, закрепленными консольно на корпусе и установленными радиально относительно его оси, при этом свободные концы пружин расположены у края глухого отверстия, а на поверхности пружин закреплены датчики деформации.
5
0
5
4
7
аш2
ШгЗ
