1
Изобретение относится к устройствам исполнительных органов рюботовманипуляторов.
Известен пневматический захват, содержащий основание и рабочий элемент, впускной и выпускной клапаны M.
Недостатки известного устройстваневозможность опознавания захватываемой детали, учета типа детали при создании удерживаемого усилия и упрощения конструкции, т.е. невысокие технологические возможности.
Цель изобретения - улучшение технологических возможностей.
Поставленная цель достигается те что захват снабжен расположенным на наружной поверхности основания датчиком индуктивности, а основание представляет собой полый цилиндр, на внутренней поверхности которого закреплен рабочий элемент в виде эластичной гофрированной оболочки., разделенной на секции.
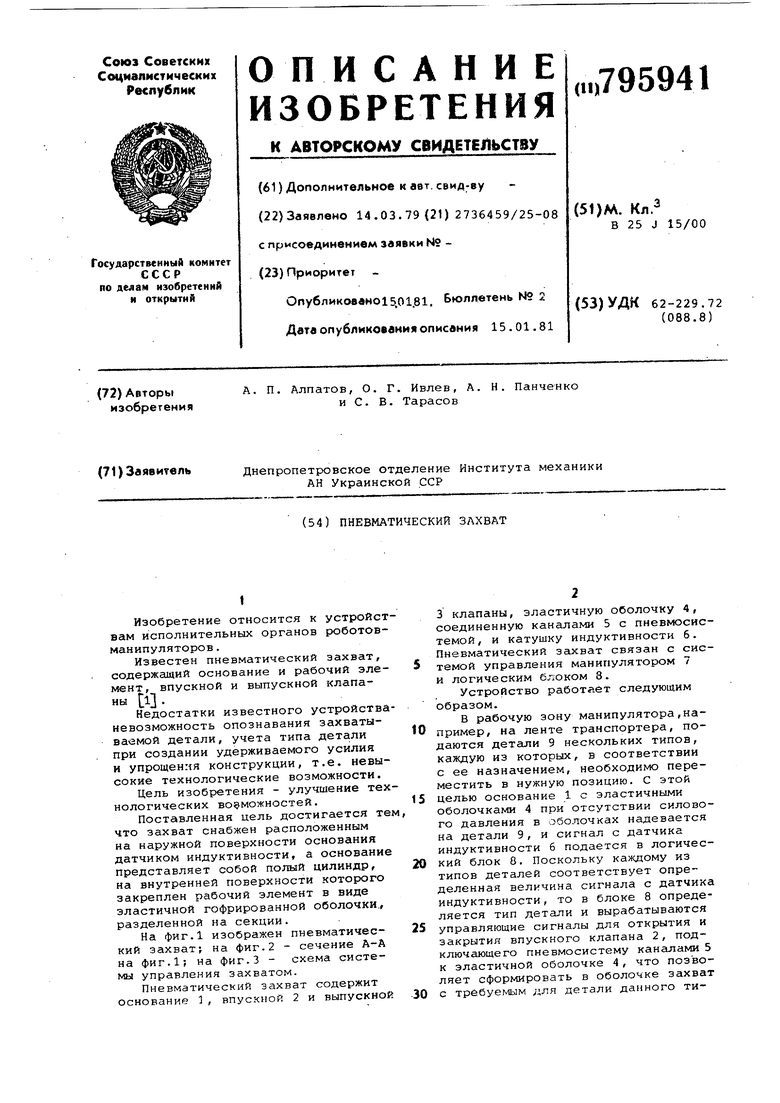
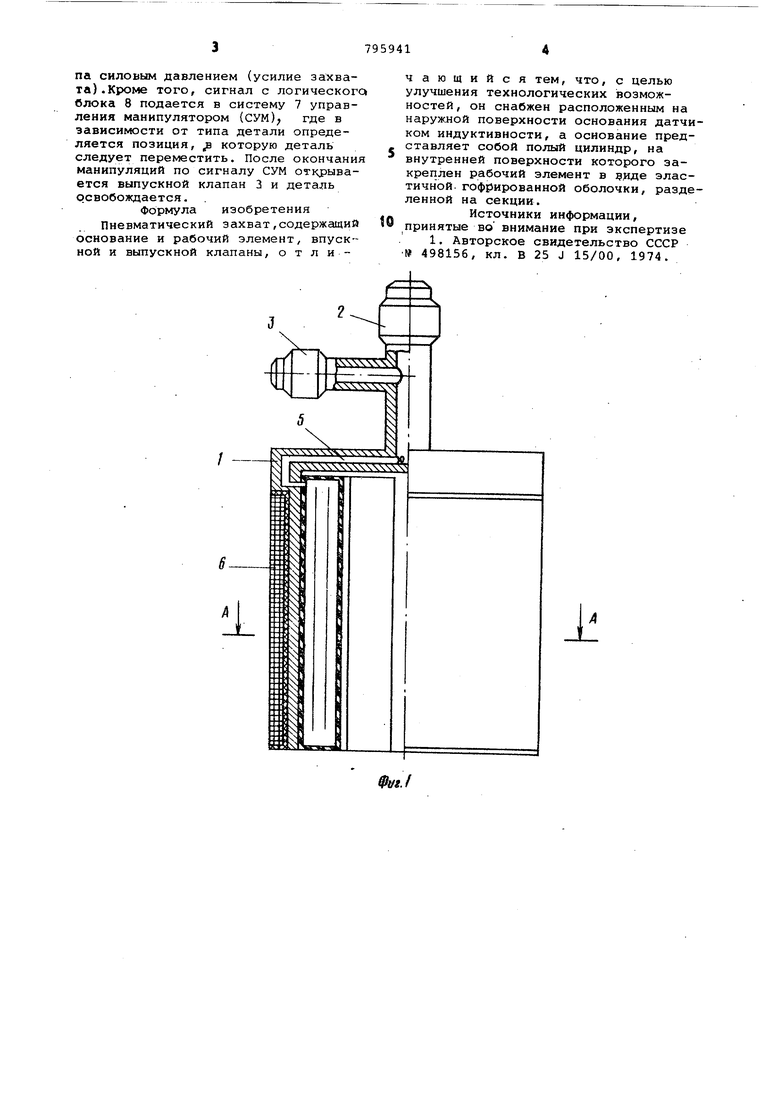
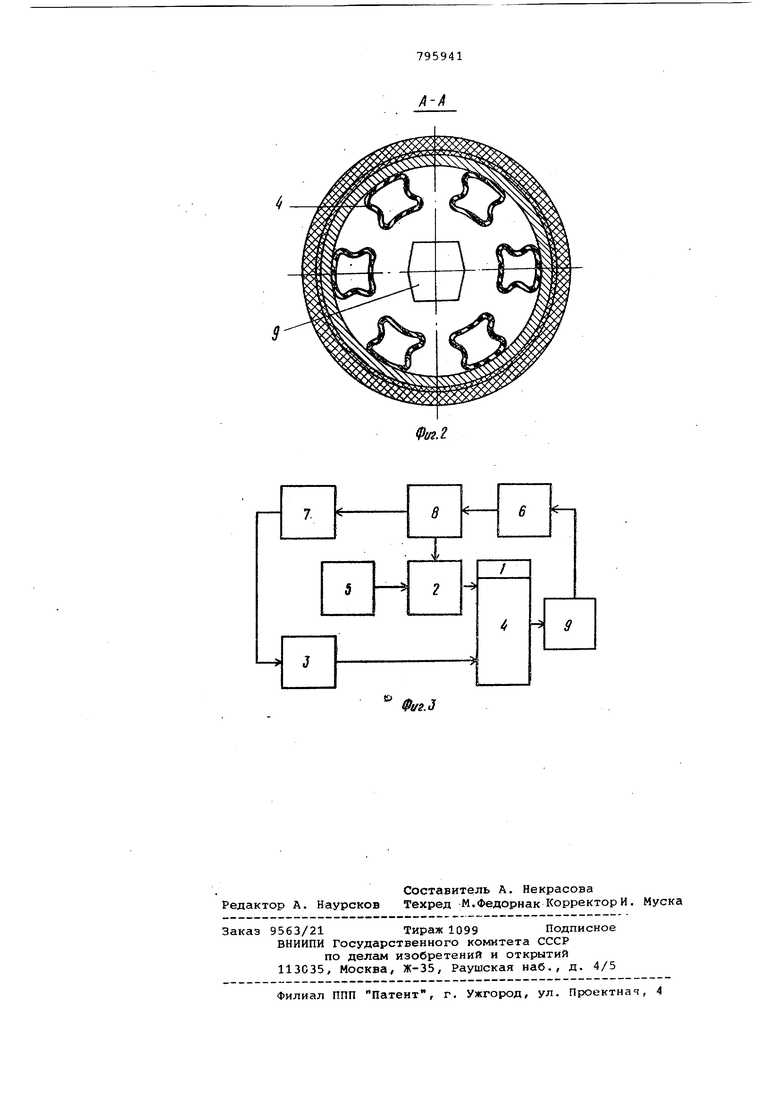
На фиг.1 изображен пневматический захват; на фиг.2 - сечение А-А на фиг. на фиг.З - схема системы управления захватом.
Пневматический захват содержит основание 1, впускной 2 и выпускной
3 клапаны, эластичную оболочку 4, соединенную каналами 5 с пневмосистемой, и катушку индуктивности 6. Пневматический захват связан с системой управления манипулятором 7 и логическим блоком 8.
Устройство работает следующим образом.
В рабочую зону манипулятора,например, на ленте транспортера, подаются детали 9 нескольких типов, каждую из которых, в соответствии с ее назначением, необходимо переместить в нужную позицию. С этой
5 целью основание 1 с эластичными
оболочками 4 при отсутствии силового давления в оболочках надевается на детали 9, и сигнал с датчика индуктивности 6 подается в логический блок 8. Поскольку каждому из типов деталей соответствует определенная величина сигнала с датчика индуктивности, то в блоке 8 определяется тип детали и вырабатываются
5 управляющие сигналы для открытия и закрытия впускного клапана 2, подключающего пневмосистему кансшами 5 к эластичной оболочке 4, что позволяет сформировать в оболочке захват 0 с требуемым для детали данного типа силовым давлением (усилие захвата).Кроме того, сигнал с логического блока 8 подается в систему 7 управления манипулятором (СУМ); где в зависимости от типа детали определяется позиция, которую деталь следует переместить. После окончания манипуляций по сигналу СУМ открывается выпускной клапан 3 и деталь освобождается.
Формула изобретения Пневматический захват,содержащий основание и рабочий элемент, впускной и выпускной клапаны, отли/ -
чающийся тем, что, с целью улучшения технологических возможностей, он снабжен расположенным на наружной поверхности основания датчиком индуктивности, а основание представляет собой полый цилиндр, на внутренней поверхности которого закреплен рабочий элемент в вкде эластичной гофрированной оболочки, разделенной на секции.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 498156, кл. В 25 J 15/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU929432A1 |
| Захват манипулятора | 1985 |
|
SU1281405A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| Пневматический захват | 1989 |
|
SU1785893A1 |
| Захват | 1990 |
|
SU1781028A1 |
| БЛОК УПРАВЛЕНИЯ ДЛЯ ГОРНОЙ МАШИНЫ | 2015 |
|
RU2691784C2 |
| Рука манипулятора | 1980 |
|
SU982896A2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2141396C1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Устройство для гальванического покрытия деталей | 1982 |
|
SU1070220A1 |
.J
