Изобретение относится к автоматике и цифровой вычислительной технике и может быть использовано при проектировании мультимикропрограммных систем контроля и управления сложными идентичными объектами.
Цель изобретения - повышение быстродействия.
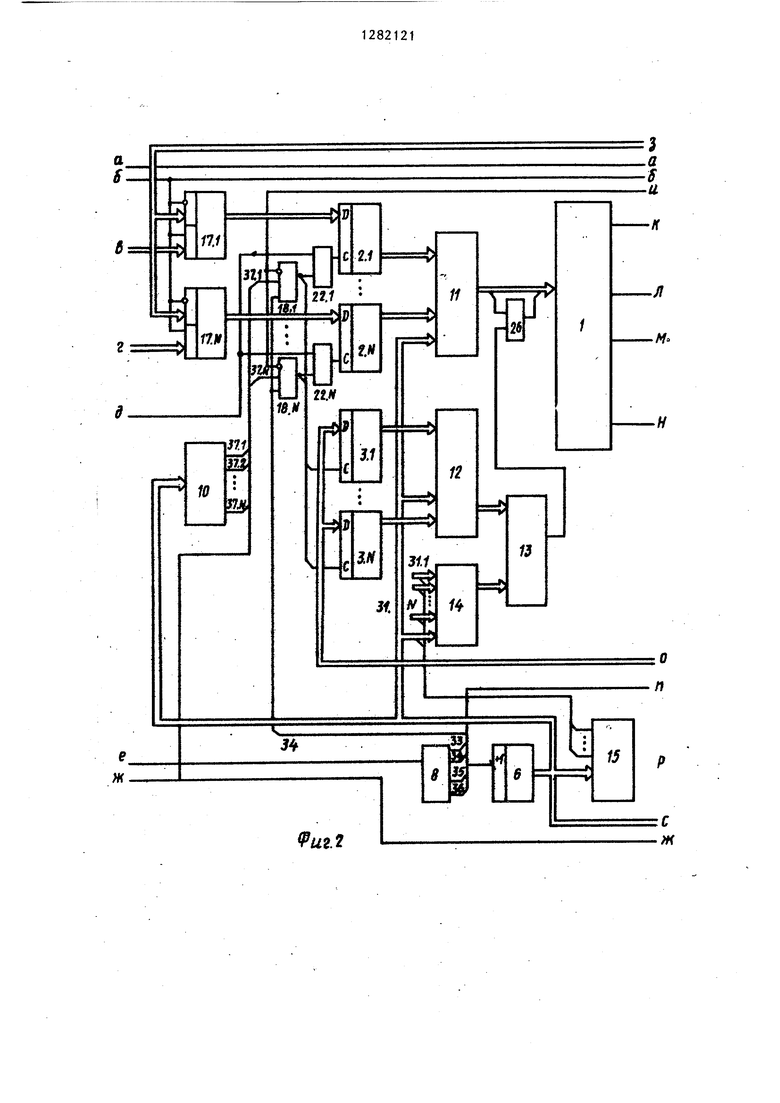
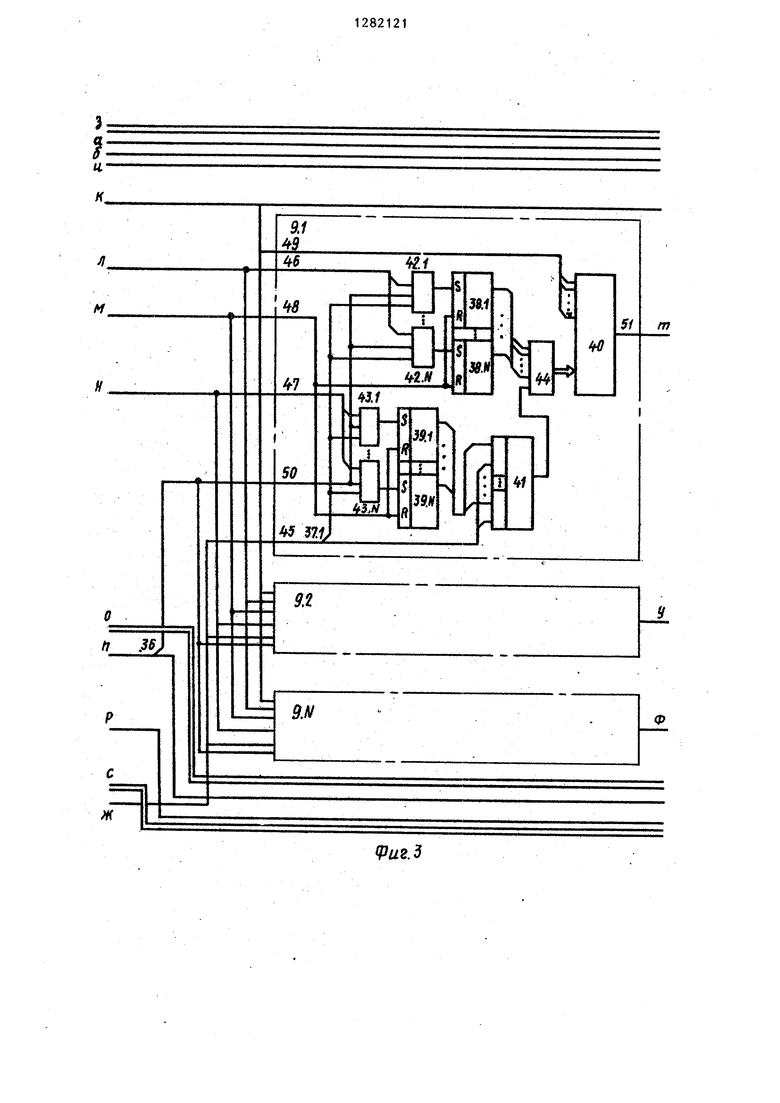
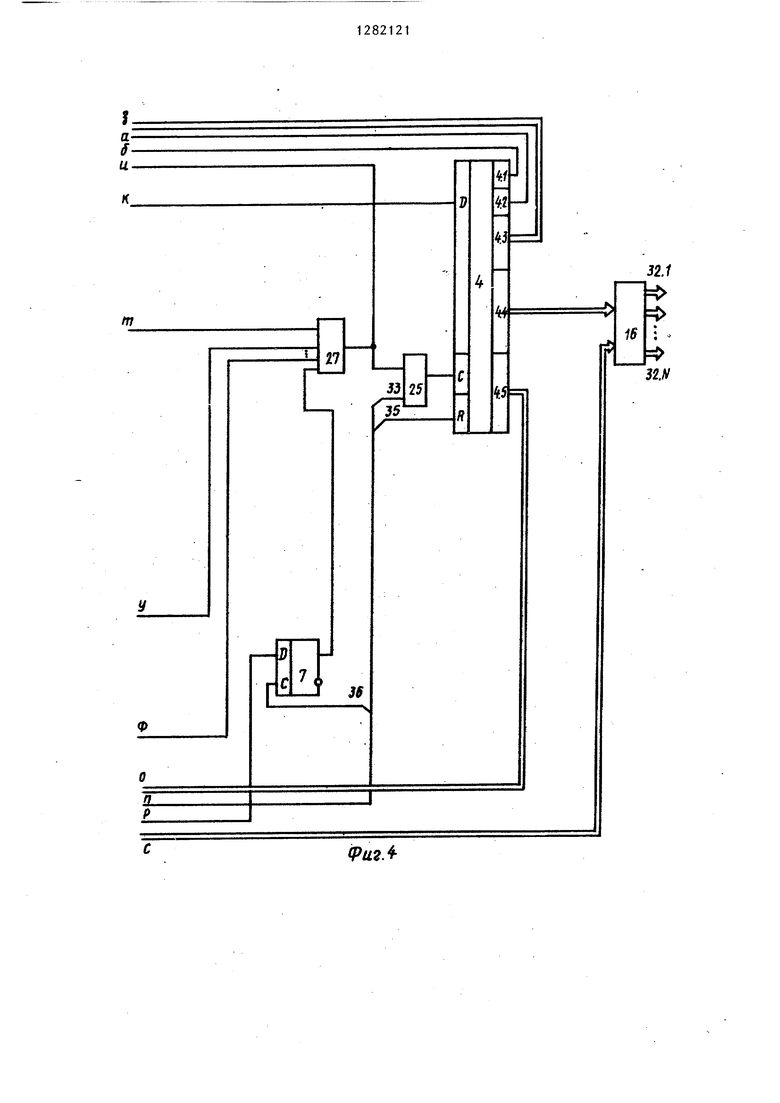
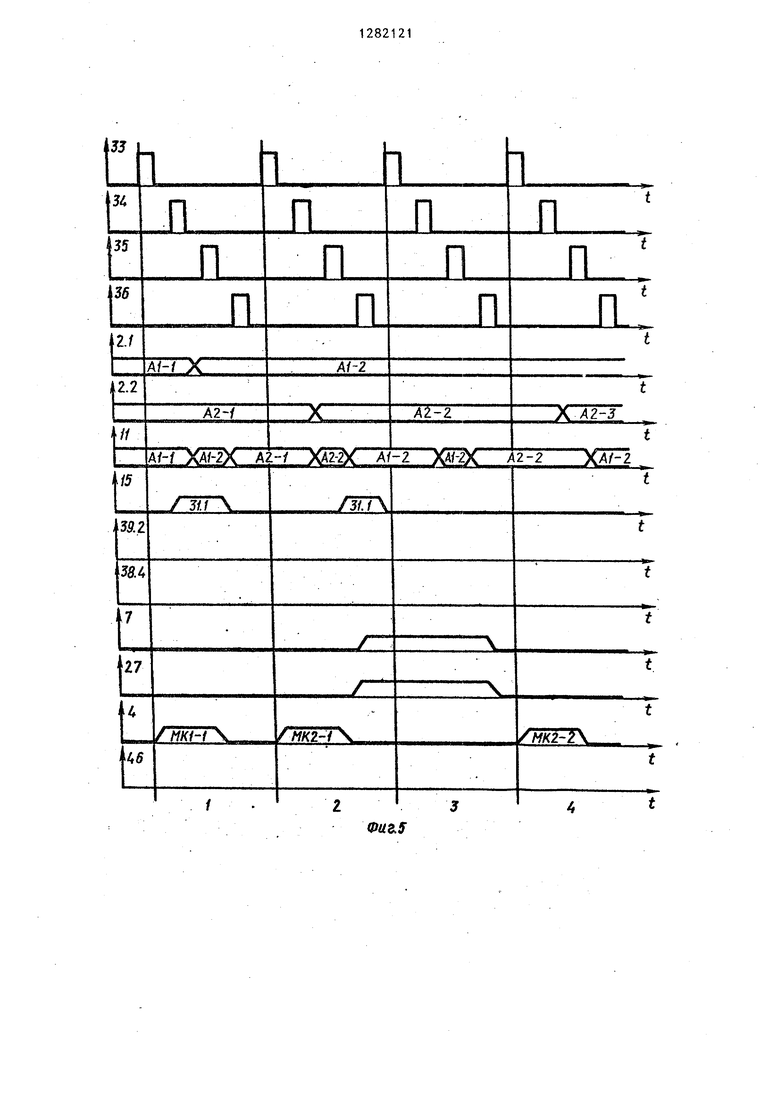
На фиг.1-4 приведена функциональная схема мультимикропрограммного уст ройства управления; на фиг.5-7 - временные диаграммы работы устройства.
Мультимикропрограммное устройство управления (фиг.1-4) содержит блок 1 памяти микрокоманд, первый 2.1 - N-й 2.N регистры адреса, первый 3.1 -N-й 3.N регистры кода логических условий, регистр 4 микрокоманд с полями 4,1 конца операции, 4,2 конца работы, 4,3 адреса следующей микрокоманды 4.4 микроопераций, 4.5 кодов логических условий, регистр 5 конца работы, счетчик 6, триггер 7 управления, генератор 8 тактовых импульсов, первьм 9,1 - N -и 9.N узлы анализа информации блокировки, дешифратор 10, муль- типлексор 11 адреса, мультиплексор 12 кодов логических условий, первый мультиплексор 13 логических условий, второй мультиплексор 14 логических условий, мультиплексор 15 сигналов блокировок, демультиплексор 16, первый 17.1 - N-й 17,N коммутаторы, первую 18, вторую 19 третью 20, четвертую 21 группы элементов И, пер- В5ТО. 22, вторую 23, третью 24 группы элементов ИЛИ, элемент И 25, первый элемент ИЛИ 26, второй элемент ИЛИ 27 . элемент И-НЕ 28, входы 29,1 - 29.N
кодов команд устройства, вход 30 пус- ка устройства, логические входы 31.1 31.N устройства, выходы 32,1-32.N сигналов микроопераций устройства, первый 33, в.торой 34, третий 35, четвертый 36 выходы генератора 8, выходы 37.1-37,N дешифратора 10,
Каждый узел анализа 9 информации блокировки содержит регистр 38 кода блокируемой микрооперации, регистр 39 кода маски, мультиплексор 40, коммутатор 41, первую 42, вторую 43 и третью 44.группы элементов И,входы 45-50, выход 51,
Мультимикропрограммное устройство управления работает в следующ11х режимах: реализации управления N объекта- .ми при наличии сигналов готовности от объектов управления реализации 45 управления N объектами при наличии сигналов .занятости объектов управления J селективных блокировок по блокируемой микрооперации, .
5Q Режим реализации микропрограммного управления при наличии сигналов готовности от объектов управления, В . исходном состоянии триггер 7 управления, все регистры и счетчик находятся
Рассмотрим работу узла 9, При счи- 55 нулевом состоянии (цепи установки тьтании микрокоманды блокировки в в исходное состояние не показаны). В такте обслуживания устройством управ- поле 4..1 регистра 4 микрокоманд за- ления 1-го объекта управления на вхо- писана единица, В блоке 1 памяти мик- ды 46 узла 9f поступает код блокируе- , рокоманд записаны микропрограммы, уп5
О
35
мой микрооперации, на входы 47 - код маски блокируемых объектов, на входы 45 - код с выхода дешифратора 10. При этом на выходе 37; присутствует еди- 5 ничный сигнал. Под действием сигнала с выхода 37 в регистр 38 записьшает- ся код блокируемой микрооперации М;, а в регистр 39 - код маски блокируемых объектов управления.
В процессе функционирования мультимикропрограммного устройства управления на управляющие входы коммутатора 41 поступают унитарные коды объектов управления, которые обслуживаются устройством. Если устройство г обслуживает блокируемый объект j, то в J-M разряде регистра 39 записывается единица, которая под действием управляющего сигнала 37j через коммутатор 41 поступает на управляющие входы элементов И группы элементов И 44. При этом код блокируемой микрооперации HI с регистра 38 через группу элементов И 44 поступает на управляющие входы мультиплексора 40. Если в операционной части, выдаваемой на j-й объект управления микрокоманды, содержится блокируемая- микрооперация
0
5
35 ,
30
М;
то единичньй сигнал соответствующего входа группы информационных входов 49 через мультиплексор 40 поступает на выход 51 узла 9j. В противном случае единичный сигнал на выходе 51 узла 9; отсутствует.
При снятии блокировки по микрооперации Mj на вход 48 узла 9; поступает единичньй сигнал, устанавливающий в нулевое состояние регистры 38 и 39,
Мультимикропрограммное устройство управления работает в следующ11х режимах: реализации управления N объекта- .ми при наличии сигналов готовности от объектов управления реализации управления N объектами при наличии сигналов .занятости объектов управления J селективных блокировок по блокируемой микрооперации, .
Режим реализации микропрограммного управления при наличии сигналов готовности от объектов управления, В . исходном состоянии триггер 7 управления, все регистры и счетчик находятся
3128
равляющие работой с первого по N-ый объектов управления.
Работа устройства начинается с подачи сигнала Пуск на вход 30 устрой ства. При этом сигналы с выходов эле- ментов ИЛИ 23.1-23.N, соответствующих работающим объектам (на соответствую- щие входы 29.1-29.N поступают не нулевые значения кодов команд), проходят через элементы И 19.1-19.N и устанавливают соответствующие триггеры регистра 5 в единичное состояние. На выходе элемента И-НЕ 28 появляется единичный сигнал, и включается генератор 8 тактовых импульсбв. ,
Сигнал Пуск через элементы ИЛИ 22.1-22.N поступает на входы синхронизации регистров 2.1-2.N адреса и записывает в данные регистры коды операций (начальные адреса микропрограмм которые поступают с выходов коммутаторов 17.1-17.N. Коммутаторы 17.1- 17.N разрешают прохождение кодов команд, поступающих соответственно с входов 29.1-29.N устройства. При поступлении С.ПОЛЯ 4.1 регистра 4 микрокоманд единичного сигнала Конец операции коды команд с выходов регистров 2.1-2.N адреса поступают на информационные входы мультиплексора 11 адреса. Одновременно с выхода счетчика 6 на управляющий вход мультиплексора 11 поступает управлякядий сигнал (номер первого объекта управления), который разрешает прохождение кода операции (адреса А1-1) с регистра 2.1 адреса на выход мультиплексора 11 адреса. Код команды с выходов мультиплексора 11 адреса поступает на входы блока 1 памяти микрокоманд. При этом из блока 1 памяти считывается первая микрокоманда (МК1-1) для первого объекта управления и поступает на информационньй вход регистра 4 микрокоманд..
По очередному тактовому импульсу Т, с выхода 33 генератора 8 происходит запись МК1-1 в регистр 4 микрокоманд, так как сигнал на. выходе элемента ИЛИ 27 отсутствует. В тате записи микрокоманды МК1-1 в регистр 4 на выходе 4.1 регистра 4 формируется нулевой сигнал, разрешакнций прохождение адреса А1-2 второй микрокоманды (МК1-2) с выхода 4.3 регистра 4 через коммутатор 17.1 на информационный вход регистра 2.1 адреса. Код лoгичecкrfx условий с выхода 4.5 ре14
гистра 4 микрокоманд поступает на информационный вход регистра 3.1 кода логических условий.
Сигналы микроопераций с выхода 4.4 регистра 4 поступают на информационный вход демультиплексора 16 одновременно с поступлением на его управляющий вход кода номера первого объекта управления со счетчика 6. Сигналы микроопераций микрокоманды МК1-1 поступают на выход 32.1 устройства, т.е.- на первый объект управления. С поступлением сигналов микроопераций на первый объект управления на входе 31.1-/появляется сигнал занятости ч (единичное значение сигнала готовности) первого объекта управления, который поступает на соответствующий информационньй вход мультиплексора 15. На управляющий вход мультиплексора 15 поступает код номера объекта с выхода счетчика 6, в результате чего на выходе мультиплексора 15 формируется единичный сигнал.
По сигналу с выхода 34 генератора 8 (импульса Т) происходит запись адреса А1-2 следующей микрокоманды в регистр 2.1 адреса и кода проверяемого логического условия в регистр 3.1. Код номера первого объекта управления со счетчика 6 поступает на дешифратор 10 и возбуждает его выходную шину 37.1.
При поступлении импульса Т на выходе элемента И 18.1 группы элементов 18. 1-18.N появляется единичньй сигнал. По заднему фронту этого импульса в регистр 2.1 адреса записывается адрес А1-2 следующей (второй) микрокоманды (МК1-2), а в регистр 3.1 - код логического условия, провеяемого перед ее вьшолнением.
Адрес очередной микрокоманды, поступающий на вход блока 1 памяти микрокоманд, формируется мультиплексором 11 и элементом ИЛИ 26 путем модификации младшего разряда адреса значением проверяемого логического условия. При нулевом значении логического условия младший разряд адреса сохраняется, а при единичном заменяется значением логического условия. Элемент ЛИ 26 формирует модифицированный разряд адреса очередной микрокоманды. Немодифицированные разряды адреса с ыходов мультиплексора 11 непосредстенно поступают на входы блока 1 паяти микрокоманд, а младший (модифицируемый) разряд адреса с выхода мультиплексора 11 поступает на вход младшего разряда адреса блока 1 памяти микрокоманд через элемент ИЛИ 26.
С выходов регистров 3.1-3oN на ни- 5 формационные входы мультиплексора . 12 поступают коды логических условий. Код номера объекта управления со счетчика 6, поступающий на управляюсов. Счетчик 6 при этом переходит нулевое состояние, и цикл работы у ройства повторяется.
По окончании выполнения текущих микропрограмм, хранящихся в блоке 1 памяти, с выхода 4.1 регистра 4 вход соответствующих 17.1-17.N ком мутаторов поступает единичное знач ние сигнала Конец операции, кото
щий вход мультиплексора 12, разрешаетfO разрешает прохождение на регистры
прохождение кода логического условия с выхода регистра 3.1 При этом код логического условия поступает на вход мультиплексора 13. Одновременно мультиплексор 14 разрешает прохождение значения логического условия с входа 31.1 устройства на информационньш вход мультиплексора 13 (так как на управляющий вход мультиплексора 14 также поступает код номера объекта управления) первого объекта (со счетчика 6). При этом значение логического условия поступает с мультиплексора 13 на элемент ИЛИ 26.
По импульсу с выхода 35 генератора 8 (импульс Т) происходит обнуление регистра 4 (передний фронт импульса) и увеличение содержимого счетчика 6 на единицу (задний фронт импульса), и устройство переходит к обслуживанию следующего (второго) объекта управления.
По импульсу с выхода 36 генератора 8 (импульс Т.) триггер 7 переходит в единичное состояние (если на выходе мультиплексора 15 присутствует единичное значение сигнала занятости объекта управления) либо в нуле- . вое (в противном случае).
По вторым тактовым импульсам Т,-Т работа предлагаемого устройства происходит аналогично работе устройства по первым тактовым импульсам , В регистр 4 записывается первая микрокоманда МК2-1 второго объекта управ- ления в регистр 2.2 адреса (А2-2) - следующая (второй) микрокоманда МК2-2 второго объекта управления, а в регистр 3.2 - код проверяемого логического условия. В (N4-1)-M цикле в регистр 4 записывается микрокоманда МК1-2 и т.д. (фиг.2).
2.1-2.N очередного кода команды с входов 29.1-29.N соответственно.
По окончании работы i-ro объекта управления с выхода 4.2 регистра 4
5 микрокоманд поступает единичный сигнал Конец работы, которьй, проходя через соответствующий элемент И 21, устанавливает в нулевое состояние со- ответств ующий разряд 5,- регистра 5.
20 конца работы.
Управление работой мультимикро- программного устройства управления с помощью регистра конца работы осущест25 вляется следующим образом.
При запуске устройства (на входе 30 единичный сигнал Пуск) сигналы с выходов элементов ИЛИ 23 группы элементов ШШ 23. через соот30 ветствующие элементы И группы элементов И 19.1-19.N поступают на входы установки в единицу разрядов регистра 5.
П::)и этом соответствующие разряды
35 5 регистра 5 устанавливаются в
единичное состояние (в единичное -состояние устанавливаются только разряды, соответствующие работающим объектам управления).
40
После выполнения i-м объектом управления текущей микропрограммы на вход 29| поступает очередной код команды. При этом на выходе элемента 45 ИЛИ 23 группы элементов ИЛИ 23.1- 23.N появляется единичный сигнал, который открьгаает по первому входу элемент И 19.2 группы элементов И 19.1-19.N. Сигнал Конец операции 50 с выхода 4.1 регистра 4 микрокоманд поступает через элемент И 20; группы 3jteMeHTOB 20.1-20.N, элемент ШШ 24;, элемент И 19, на вход установки в Сброс счетчика 6 в нулевое состоя- единицу разряда регистра 5 конца ние происходит по сигналу переполне- 55 Работы. При этом либо подтверждается ния, который является внутренним сиг- единичное состояние разрядов 5 налом счетчика 6. Данньй сигнал формируется после поступления на счетный вход счетчика 6N тактовых импуль1
i-й объект управления выполняет микропрограмму, либо разряд 5 устанавливается в единичное состояние.
5 21216
сов. Счетчик 6 при этом переходит в нулевое состояние, и цикл работы устройства повторяется.
По окончании выполнения текущих микропрограмм, хранящихся в блоке 1 памяти, с выхода 4.1 регистра 4 на вход соответствующих 17.1-17.N коммутаторов поступает единичное значение сигнала Конец операции, который
O разрешает прохождение на регистры
2.1-2.N очередного кода команды с входов 29.1-29.N соответственно.
По окончании работы i-ro объекта управления с выхода 4.2 регистра 4
микрокоманд поступает единичный сигнал Конец работы, которьй, проходя через соответствующий элемент И 21, устанавливает в нулевое состояние со- ответств ующий разряд 5,- регистра 5.
конца работы.
Управление работой мультимикро- рограммного устройства управления с помощью регистра конца работы осущестляется следующим образом.
При запуске устройства (на входе 30 единичный сигнал Пуск) сигналы с выходов элементов ИЛИ 23 группы элементов ШШ 23. через соответствующие элементы И группы элементов И 19.1-19.N поступают на входы установки в единицу разрядов регистра 5.
П::)и этом соответствующие разряды
5 регистра 5 устанавливаются в
единичное состояние (в единичное -состояние устанавливаются только разряды, соответствующие работающим объектам управления).
После выполнения i-м объектом управления текущей микропрограммы на вход 29| поступает очередной код команды. При этом на выходе элемента ИЛИ 23 группы элементов ИЛИ 23.1- 23.N появляется единичный сигнал, который открьгаает по первому входу элемент И 19.2 группы элементов И 19.1-19.N. Сигнал Конец операции с выхода 4.1 регистра 4 микрокоманд поступает через элемент И 20; группы 3jteMeHTOB 20.1-20.N, элемент ШШ 24; элемент И 19, на вход установки в единицу разряда регистра 5 конца Работы. При этом либо подтверждается единичное состояние разрядов 5
1
i-й объект управления выполняет микропрограмму, либо разряд 5 устанавливается в единичное состояние.
12821218
; Таким образом, записи адреса следующей микрокоманды в регистр 2.2 не происходит и в следукнцем цикле работы устройства из блока 1 памяти счи- 5 тьшается та же микрокоманда, что и в текущем цикле по адресу, хранящемуся в регистре 2.2 адреса и так далее до тех пор, пока на вход 31.2 не поступает нулевое значение сигна- tO ла занятости от второго объекта управления.
На выходе мультиплексора 15 сигнал при этом отсутствует. При поступлении импульса Т4 с выхода 36 гене- Режим реализации микропрограммного |5 ратора 8 триггер 7 устанавливается в
если i-й объект управления только начинает работу.
При установке всех разрядов регистра 5 в нулевое состояние (что соответствует окончанию работы, муль- тимикропрограммным устройством управления) на выходе элемента И-НЕ 28 появляется нулевой сигнал. При этом генератор 8 отключается и прекращает выдачу тактовых импульсов Т,-Т и мультимикропрограммное устройство управления прекращает функционирование.
управления при наличии сигналов занятости от объектов управления. Функционирование предлагаемого устройства в этом режиме отличается от рассмотренного тем, что при условии за- 20 нятости i-ro объекта управления (объект управления не успел закончить работу по предыдущей микрокоманде) запись очередной микрокоманды в реПо тактовому импульсу Т, в регистр 4 микрокоманд записьшается код очередной микрокоманды. По тактовому импульсу TI, поступакнцему через элемент И 18.2 на вход синхронизации регистра 3.2 и через элемент ИЛИ 22.2 на вход синхронизации регистра 2.2,
гистр 4, адреса следующей микрокоман-25 {фоисходит запись в них кода проверяе.ды для данного объекта в регистр 2;
. и кода проверяемого логического условия в регистр 3 i не происходит.
Рассмотрим алгоритм функционирования устройства в предположении, что 30 при выдаче микрокоманды второму объекту управления данный объект окамого логического условия и кода адреса очередной микрокоманды соответственно. Далее устройство функционирует аналогично описанному алгоритму.
- Таким образом, при наличии сигналов занятости от объектов управления запись адресов микрокоманд в регистры
- Таким образом, при наличии сигналов занятости от объектов управления запись адресов микрокоманд в регистры
зался занятым, т.е. на входе 31 сиг- адреса 2.1-2.N, кодов логических услонала занятости присутствует единичвий в регистры 3.1-3.N и запись оче-i ное значение сигнала занятости. Этот 35 редной микрокоманды в регистр 4 миксигнал проходит на выход мультиплексора 15 и поступает на информационный вход триггера 7. При поступлении на вход синхронизации триггера 7 сигрокоманд не производятся до тех пор, пока объекты управления не завершат выполнение предыдущее микрокоманд. Режим селективных блокировок по
нала с выхода 36 генератора 8 импуль-« блокируемым микрооперациям.«В этом са Тд он устанавливается в единичное режиме реализуется возможность селек- состояние. При этом на выходе эленеи- тивной блокировки одним объектом уп- та ИЛИ 27 появляется единичный сигнал, равления нескольких объектов управле- запрещающий передачу импульса Т, че- нйя. рез элемент И 25 и импульса Т .через 45 i элемент И 18.2 группы элементов И 18.1-18.N.
I
В данном режиме устройство управления начинает функционировать, если при считывании очередной микрокоманды из блока 1 памяти микрокоманд считывается код маски блокируемых объектов и код блокируемой микрооперации.
Таким образом, сигнал на вход синВ данном режиме устройство управле ния начинает функционировать, если при считывании очередной микрокоманды из блока 1 памяти микрокоманд считывается код маски блокируемых объектов и код блокируемой микрооперации.
Например, при работе i-ro объекта управления в этом режиме в узел 9 j записывается код маски блокируемых
хронизации регистра 4 не поступает 50 и в регистр 4 код очередной микрокоманды MK2-i не записьгаается. Аналогично отсутствие сигнала на входах синхронизации регистров 2.2 н 2.2 при действии импульса Tj не позволяет 55 объектом управления объектов уп- записать в них адрес очередной микро- равления и код блокируемой микроопе- комаиды (MK2-(i+1)) и код проверяемо- рации Mj. При последующем обслужива- го перед ее вьшолнением логического нии устройством управления блокируе- условия. мых объектов в узле 9; анализируются
нулевое состояние и сигнал на выходе элемента ИЛИ 27 исчезает.
По тактовому импульсу Т, в регистр 4 микрокоманд записьшается код очередной микрокоманды. По тактовому импульсу TI, поступакнцему через элемент И 18.2 на вход синхронизации регистра 3.2 и через элемент ИЛИ 22.2 на вход синхронизации регистра 2.2,
{фоисходит запись в них кода проверяемого логического условия и кода адреса очередной микрокоманды соответственно. Далее устройство функционирует аналогично описанному алгоритму.
- Таким образом, при наличии сигналов занятости от объектов управления запись адресов микрокоманд в регистры
адреса 2.1-2.N, кодов логических услорокоманд не производятся до тех пор, пока объекты управления не завершат выполнение предыдущее микрокоманд. Режим селективных блокировок по
блокируемым микрооперациям.«В этом режиме реализуется возможность селек- тивной блокировки одним объектом уп- равления нескольких объектов управле- нйя.
блокируемым микрооперациям.«В этом режиме реализуется возможность селек- тивной блокировки одним объектом уп- равления нескольких объектов управле- нйя. i
В данном режиме устройство управления начинает функционировать, если при считывании очередной микрокоманды из блока 1 памяти микрокоманд считывается код маски блокируемых объектов и код блокируемой микрооперации.
Например, при работе i-ro объекта управления в этом режиме в узел 9 j записывается код маски блокируемых
объектом управления объектов уп- равления и код блокируемой микроопе- рации Mj. При последующем обслужива- нии устройством управления блокируе- мых объектов в узле 9; анализируются
912
вьщаваемые им микрокоманды на нали- чие микрооперации М;. Если эта микрооперация имеет место, то на выходе узла 9{ появляется единичный сигнал, поступающий на элемент ИЛИ 27. При этом устройство функционирует аналогично функционированию во втором режиме работы: очередная микрокоманда в регистр 4 микрокоманд, адреса следующей микрокоманды в регистр 2.к и код проверяемого логического условия в регистр З.к (к - номер блокируемого объекта управления) не записьюаются. При этом сигналы микроопераций на .к-й объект управления не поступают и он простаивает.
Окончание режима блокировки происходит следующим образом. При считывании очередной микрокоманды для блокирующего объекта управления на втором выхо-де блока 1 памяти микрокоманд появляется единичный сигнал блокировки i-M объектом управления других объектов управления. При этом регистры 38,39 узла 9; устанавливаются в нулевое состояние. В дальнейшем при обслуживании к-го объекта управления единичный сигнал на выходе узла 9; отсутствует и устройство работает аналогично работе в первом режиме.
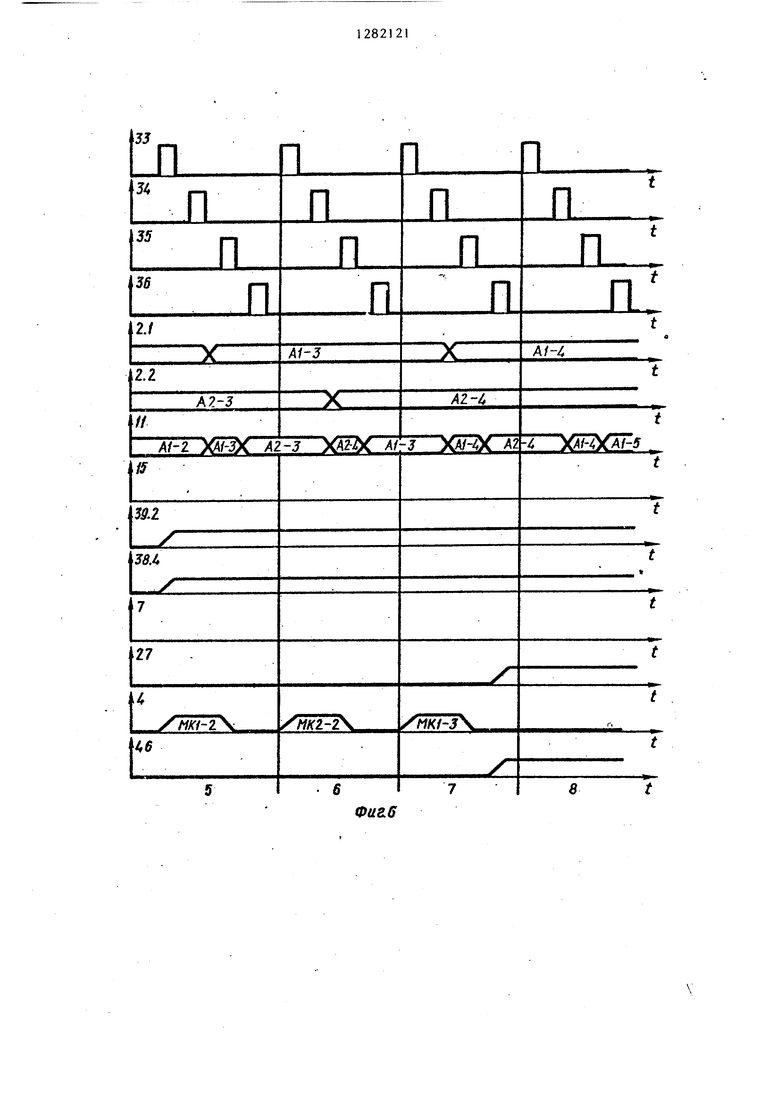
На фиг.2 приведена временная диаграмма функционирования устройства при ,
В первом цикле работы выдается МК1-1 на первый объект управления. Во втором цикле работы выдается МК2на второй объект управления. Так как первый объект к третьему циклу не успевает выполнить МК1-1 (единичньй сигнал на входе 31.1 устройства), то он в третьем цикле простаивает. В четвертом цикле вьщается МК2-2 на второй объект. В пятом цикле на первый объект выдается МК1-2 (сигнал на входе 31.1 отсутствует). При этом осуществляется блокировка второго обекта по четвертой микрооперации.
В шестом цикле на второй объект вьщается МК2-3 (сигнал на выходе узл 9.1 отсутствует). В седьмом цикле на первый объект управления выдается микрокоманда МК1-3. В восьмом цикле на второй объект МК2-4 не выдается, так как в ней присутствует микроопе- рация М4 (на выходе узла 9.1 присутствует единичный сигнал)о
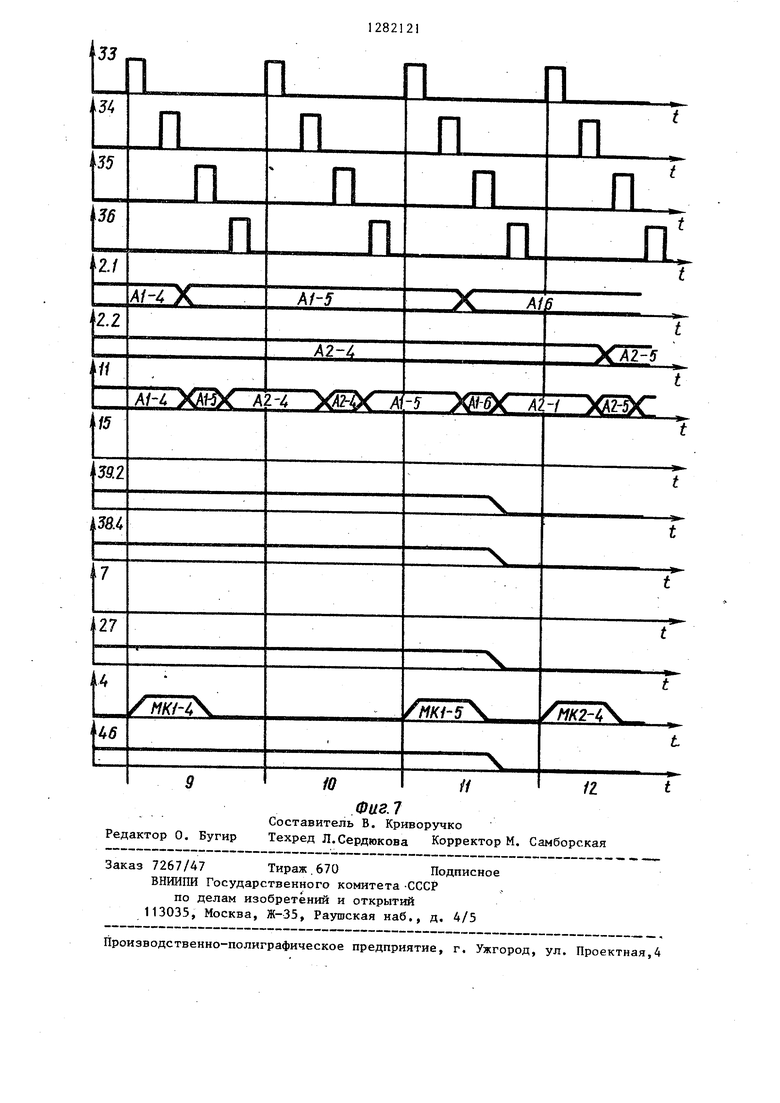
В девятом и десятом цикле устройство функционирует так же, как и в
5
5
0 5
0 5
2110
седьмом и в восьмом циклах. В одиннадцатом цикле на первый объект выдается МК1-5 и снимается блокировка второго объекта управления (сигнал на выходе узла 9.1 исчезает). В двенадцатом цикле на второй объект выдается МК2-4.
Формула изобретения
1. Мультимикропрограммное устройство управления, содержащее блок памяти микрокоманд, с первого по N-й регистры адреса, с первого по N-й регистры кодов логических условий, регистр микрокоманд, регистр конца работы, триггер управления, счетчик, генератор тактовых импульсов, мультиплексор адреса, мультиплексор кодов логических условий, первый и второй мультиплексоры логических условий, мультиплексор сигналов блокировок, демультиплексор, дешифратор, с первого по N-й коммутаторы, первую группу элементов И, группу элементов ИЛИ, элементы И, ИЛИ, И-НЕ, причем вход пуска устройства соединен с первыми входами элементов ИЛИ первой группы, выходы которых соединены с входами синхронизации, с первого по N-й регистры адреса соответственно, выходы с, первого по N-й регистров адреса соединены с одноименными информационными входами мультиплексора адреса, с первого по (т-1)-й выходы которого (где га - число разрядов кода адреса
. микрокоманд) соединены с входами немодифицируемых разрядов адреса блока памяти микрокоманд, а т-й выход мультиплексора адреса соединен с первым входом первого элемента ИЛИ, выход которого соединен с входом модифицируемого разряда адреса блока памяти микрокоманд, выход кода микрокоманды блока памяти микрокоманд соединен с информационным входом регистра микрокоманд, выход микроопераций которого соединен с информационным входом де- мультиплексора, выход признака конца операции регистра микрокоманд соединен с управляющими входами с первого по N-й коммутаторов, выход кода адреса очередной микрокоманды регистра микрокоманд соединен с первыми ИНФОРМАЦИОННЫМИ входами с первого по N-й коммутаторов, выход кода проверяемого
-логического условия регистра микрокоманд соединен с информационными входами с первого по N-й регистров кои12
дов логических условий, выходы с первого по N-й регистров кодов логических условий соединены с одноименными информационными входами мультиплексора кодов логических условий, выход которого соединен с управляющим входом первого мультиплексора логических условий, выход первого мультиплексора логических условий соединен с вторым входом первого элемента ИЛИ входы логических условий первой группы устройства соединены с информационными входами второго мультиплексора логических условий, выход которого соединен с информационным входом пер- вого мультиплексора логических условий, входы логических условий второй группы устройства соединены с информационными входами мультиплексора сигналов блокировки, первый выход гене- ратора тактовых импульсов соединен с первым входом элемента И, второй выход генератора тактовых импульсов соединен с первыми входами элементов И первой группы, третий выход генератора тактовых импульсов соединен с входом установки в ноль регистра микрокоманд и со счетным входом счетчика, выход которого соединен с управляющими входами мультиплексора сигна- лов блокировки, демультиплексора, мультиплексора адреса, второго мультиплексора логических условий и информационным входом дешифратора, с первого по N-й выходы дешифратора со- единены с вторыми входами одноименных элементов И первой группы, выходы которых соединены с вторыми входами элементов ИЛИ первой.группы, с входами синхронизации с первого по N-й регистров логических условий соответственно,; входы кодов команд устройства соединены с вторыми информационными входами с первого по N-й коммутаторов, отличающее- с я тем, что, с целью повышения его быстродействия, в него введены с первого по N-й узлы аналиэа информации блокировки, с второй по четвертую группы элементов И, вторая и третья группы элементов ИЛИ, причем входы кодов команд устройства соединены с входами элементов ИЛИ второй группы, выходы которых соединены с первыми входами элементов И второй группы, выходы дешифратора соединены с первыми группами информационных входов с первого по N-й узлов анализа информации блокировки, с первыми входами .
21
12
элементов И третьей и четвертой групп, выходы эле ментов И третьей группы соединены с первыми входами элементов ИЛИ третьей группы, выходы которых соединены с вторыми входами элементов И второй группы, выходы элементов И второй группы соединены с входами установки в единицу соответствующих разрядов регистра конц работы, инверсные выходы которых соединены с входами элемента И-НЕ, выход элемента И-НЕ соединен с входом запуска генератора тактовьпс импульсов, четвертый выход которого соединен е входом синхронизации триггера управления, выход которого соединен с первым входом второго элемента ИЛИ выход которого соединен с третьими входами элементов И первой группы и с вторым входом элемента И, выход элемента И соединен с входом синхронизации регистра микрокоманд, выход признака конца операции регистра микрокоманд соединен с вторыми входами элементов И третьей группы, выход признака конца работы регистра микрокоманд соединен с вторыми входами элементов И четвертой группы, выходы которых соединены с входами устачовк в ноль соответствующих разрядов регистра конца работы, вход пуска устройства соединен с вторыми входами элементов ИЛИ третьей группы, выход мультиплексора сигналов блокировок соединен с информационным входом триггера управления, выходы кода блокируемой микрооперации, кода маски и кода микрокоманды блока памяти микрокоманд соединены соответственно с второй, третьей, четвертой группами информационных входов с первого по N-й узлов анализа информации блокировки, выходы узлов анализа инфЬрма- ции блокировки с первого по N-й соединены соответственно с вторым по N+1-й входами второго элемента ИЛИ, выходы демультиплексора являются с первого по N-й выходами сигналов микроопераций устройства, четвертый выход генератора тактовых импульсов соединен с входами синхрони.зации узлов анализа информации блокировки с первого по N-й, входы сброса которых соединены с выходом признака снятия блокировки блока памяти микрокоманд.
2. Устройство по п,1, отличающее ся тем, что узел анаЛИЗа информации блокировки содержит регистр маски, регистр кода блокируемой микрооперации, коммутатор, мультиплексор, первую, вторую и третью группы элементов И, причем i-й (i et,N) информационный вход первой группы узла соединен с первыми входами элементов И первой и второй групп, N информационных входов первой группы узла соединены с управляющими входами коммутатора, выходы элементов И первой группы соединены с входами установки в единицу соответствующих рязрадов регистра кода блокируемой микрооперации, прямые выходы которых соединены с первыми входами элементов И третьей группы, вькоды элементов И третьей группы соединены с уп- равляющими входами мультиплексора, выход которого соединен с выходом уз ла,.информационные входы второй груп
пы узла соединены с вторыми входами элементов И первой группы, информационные входы третьей группы узла соединены с вторыми входами элементов
5 И второй группы, выходы которых соединены с входами установки в единицу соответствующих разрядов регистра кода маски, прямые выходы которых соединены с информационными входами комiO мутатора, выходы которого соединены с вторыми входами элементов И третьей группы, вход сброса узла соединен с входами установки в ноль регистра блокируемой микрооперации и регистра
15 кода маски, информационные входы четвертой группы узла соединены с информационными входами мультиплексора, а вход синхронизации узла соединен с третьими вхо- 20 дами элементов И первой и второй групп.

| название | год | авторы | номер документа |
|---|---|---|---|
| Мультимикропрограммное устройство управления с контролем | 1985 |
|
SU1272333A1 |
| Мультимикропрограммное устройство управления | 1985 |
|
SU1256026A1 |
| Мультимикропрограммное устройство для контроля и управления | 1984 |
|
SU1249513A1 |
| Мультимикропрограммное устройство управления | 1983 |
|
SU1161942A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1109751A1 |
| Многотактное микропрограммное устройство управления | 1986 |
|
SU1332318A1 |
| Мультимикропрограммная управляющая система | 1983 |
|
SU1133594A1 |
| Программируемый контроллер | 1988 |
|
SU1642446A1 |
| Система для программного управления резервированными объектами и их диагностирования | 1989 |
|
SU1741295A1 |
| Микропрограммное устройство управления | 1986 |
|
SU1381506A1 |

-Изобретение относится к области автоматики и вычислительной техники и может быть использовано при разработке ЭВМ и других цифровых систем с микропрограммным управлением. Целью изобретения является повышение быстродействия. Устройство содержит блок памяти микрокоманд, N регистров адреса, N регистров кода логических условий, регистр микрокоманд, регистр конца работы, счетчик, триггер управления, генератор тактовых импульсов, N узлов анализа информации блокировок объектов управления, дешифратор, четыре мультиплексора, демультиплексор, N коммутаторов, четыре группы элементов И, три группы элементов ИЛИ, элемент И, два элемента ИЖ, элемент И-НЕ. Цель изобретения достигается за счет реализации в устройстве блокировки одними объектами управления работы других объектов. 1 з.п.ф-лы, 7 ил. (Л кэ 00
г Л
04
3D О1Ь
J7.
П1
37
га
yiM
13JL.
28
5М
U2.2
(pu2.5
a 5 и
т
17
Фи2.
25
5
fff
г
«
: -
J5
Ел
35
П
36
A1-i Х
А/-2
А2Ч
АЕГ)
Ли
27
1
п
П
п
п
Д2-2
А А2-3
AF2 ХЩ)
А2-2XAf-Z
f МК2-1 V
46
2J
(Ptf а5
УмК2-
t
Фиг.6
Редактор 0. Бугир
ФигЛ
Составитель В. Криворучко
Техред Л.Сердюкова Корректор М. Самборская
Заказ 7267/47 Тираж.670Подписное
ВНРШПИ Государственного комитета -СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| Адаптивное микропрограммное устройство управления | 1980 |
|
SU934471A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для управления электродвигателем постоянного тока | 1981 |
|
SU964939A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Микропрограммное устройство управления | 1981 |
|
SU962943A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Майоров С.А., Новиков Г.И | |||
| Структура ЭВМ.- Л.: Машиностроение, 1979, с.313-314, рис.10.4 | |||
| Мультимикропрограммное устройство управления | 1983 |
|
SU1161942A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
