Изобретение относится к автойатй ке и вычислительной технике и может быть использовано при разработке art паратно-программных средств управл ния и диагностирования отказоустой чивых вычислительных и управляющих;
: --- -; ;. .:: .- Y : .- ,-f: .V ; V
систем, а также сложных те :Цеских объектов в АСУ ТП. ; Целью изобретения .является повы- I шение надежности системы. v.H Сущность изобретения состоит Б повышении отказоустойчивости системы
за счет обеспечения возможности непрерывного управления объектами при наличии отказов в них. Система содержит N объектов, два идентичных канала, осуществляющих диагностирование и управление, и специальный автомат, управляющий процессом реконфигурации, т.во подключением каналов управления к соответствующим объек- та м, и осуществляющий коммутацию их входов-выходовс Первый и второй каналы управления реализуют режимы рабочих микропрограмм и микропрограмм диагностирования, В режиме рабочих микропрограмм один из Каналов управляет работоспособным объектом, а второй при появлении сигнала ошибкой выясняет причину поступления сигнала Ненорма, который может быть вызван отказом объекта или сбоем. При поступлении сигнала логического условия Ненорма специальный автомат, управляющий процессом реконфигурации осуществляет перекоммутацию резервны объектов и определяет порядок взаимо действия каналов управления с объектами.
.Таким образом, наличие двух каналов управления и специальных технических средств, управляющих процессо реконфигурации, обеспечивает возможность непрерывного управления работоспособными объектами в резервируем системе при наличии отказов в них.
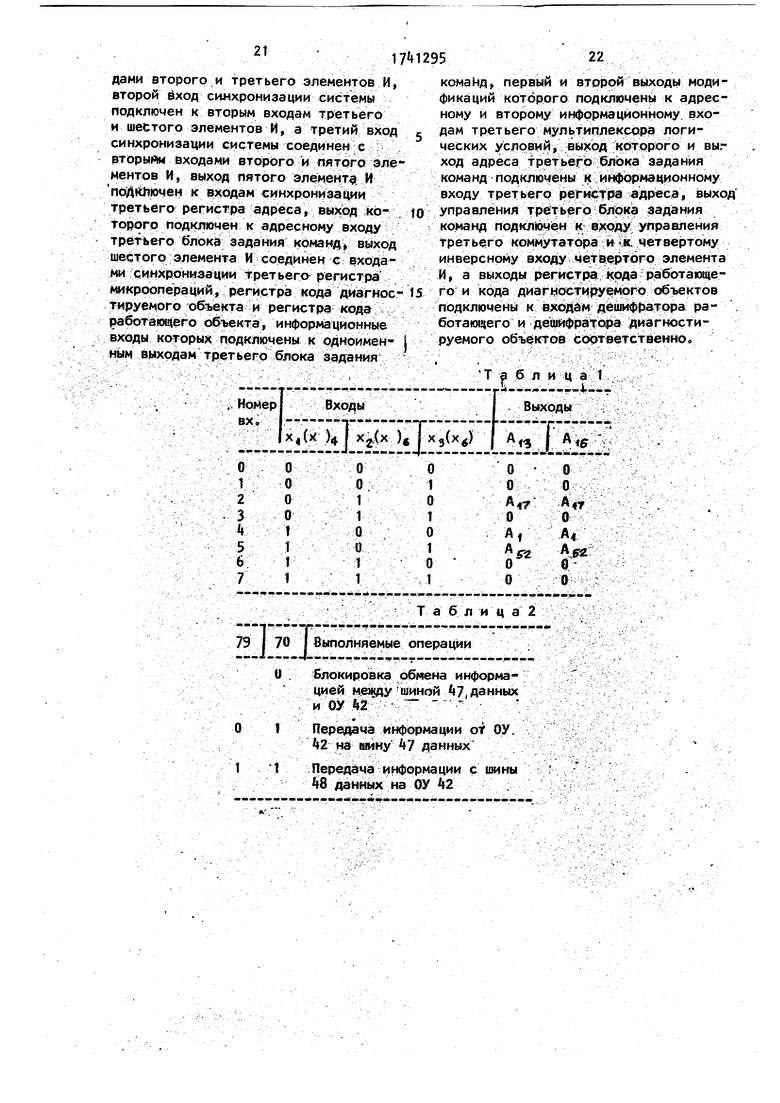
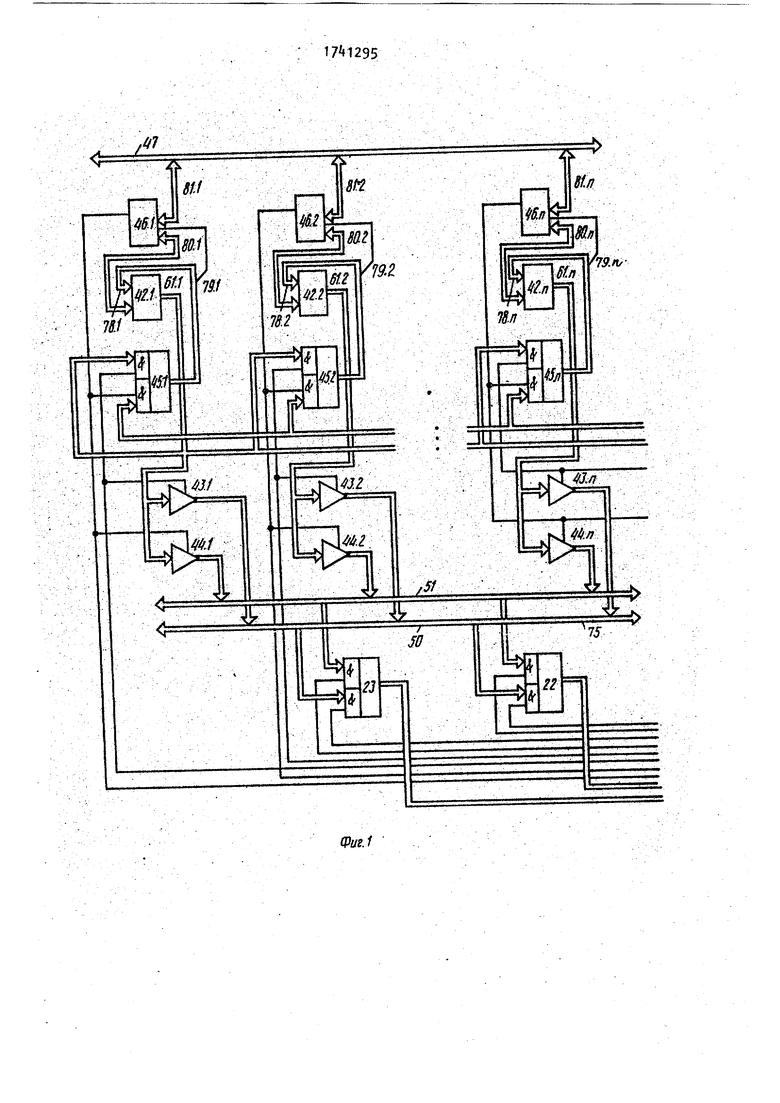
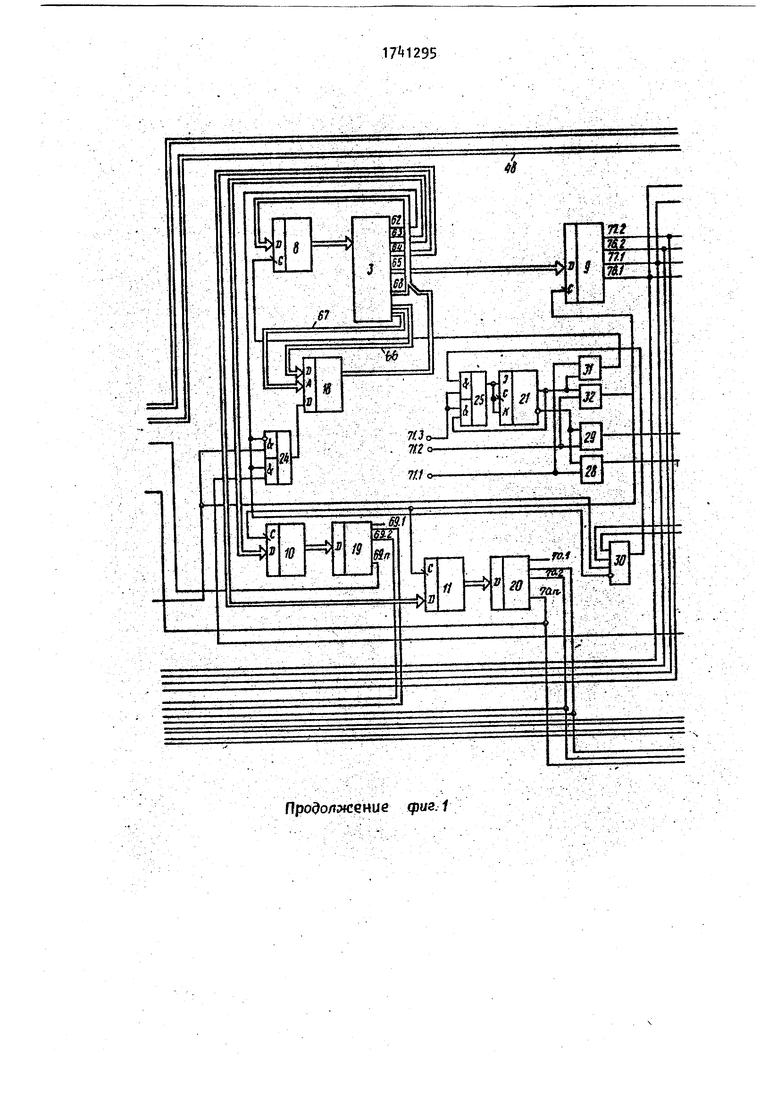
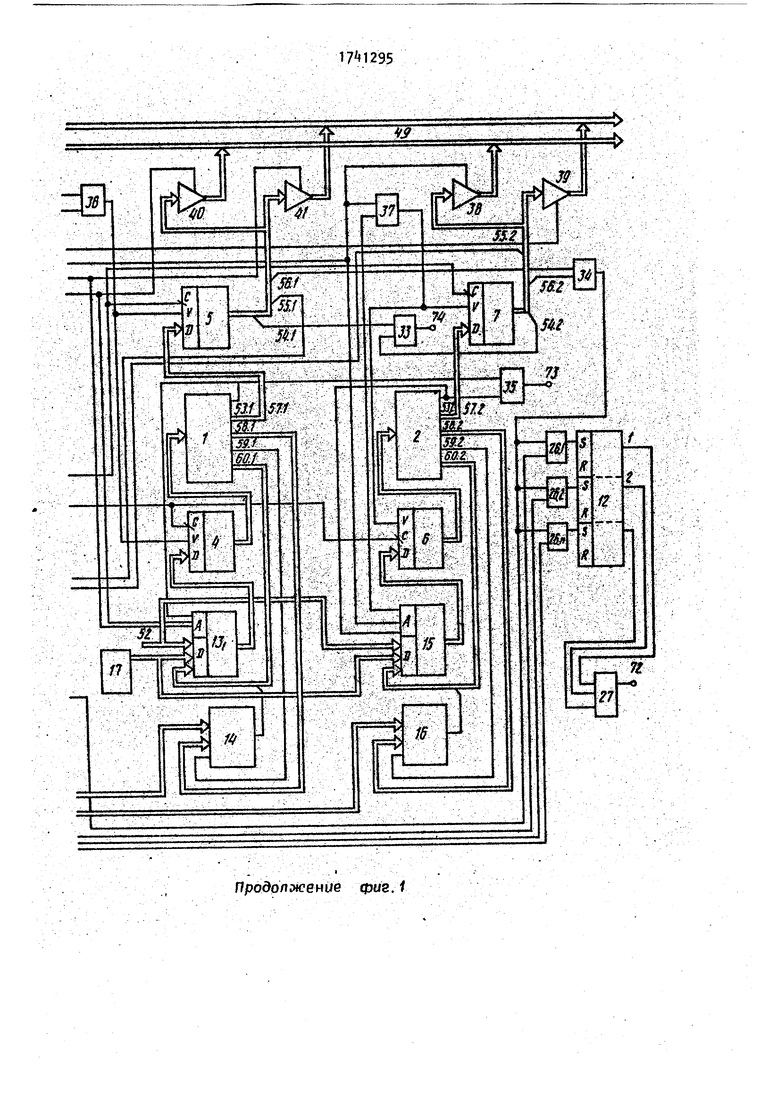
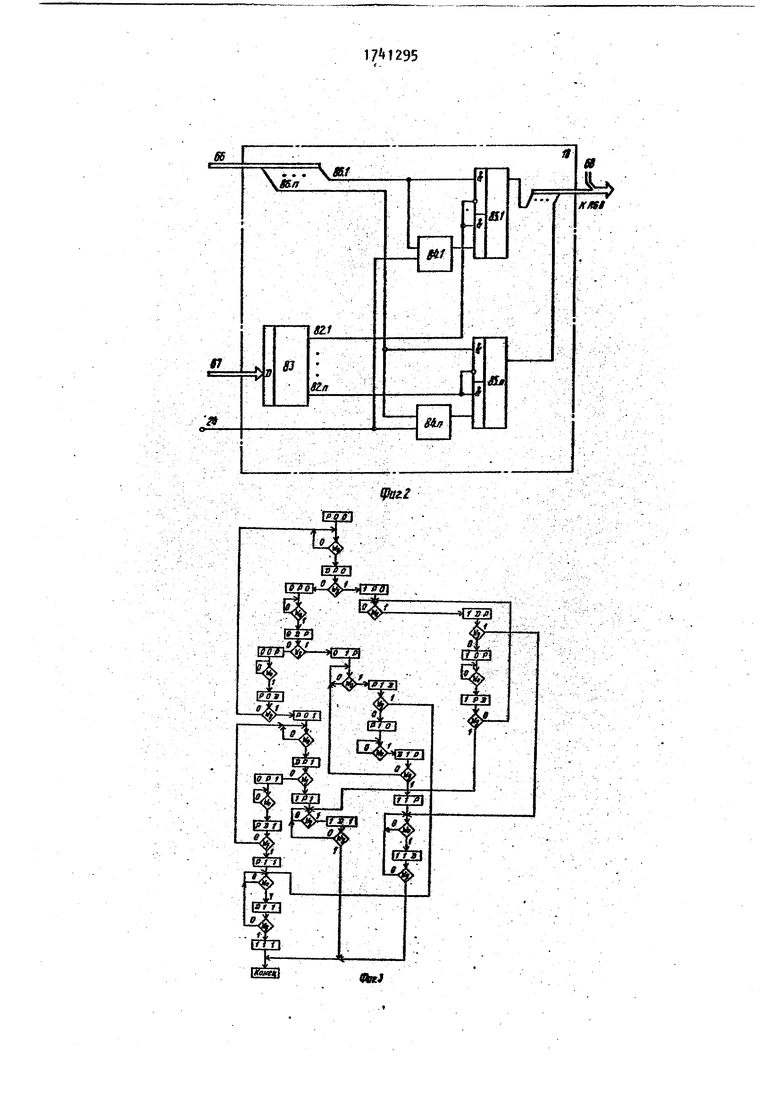
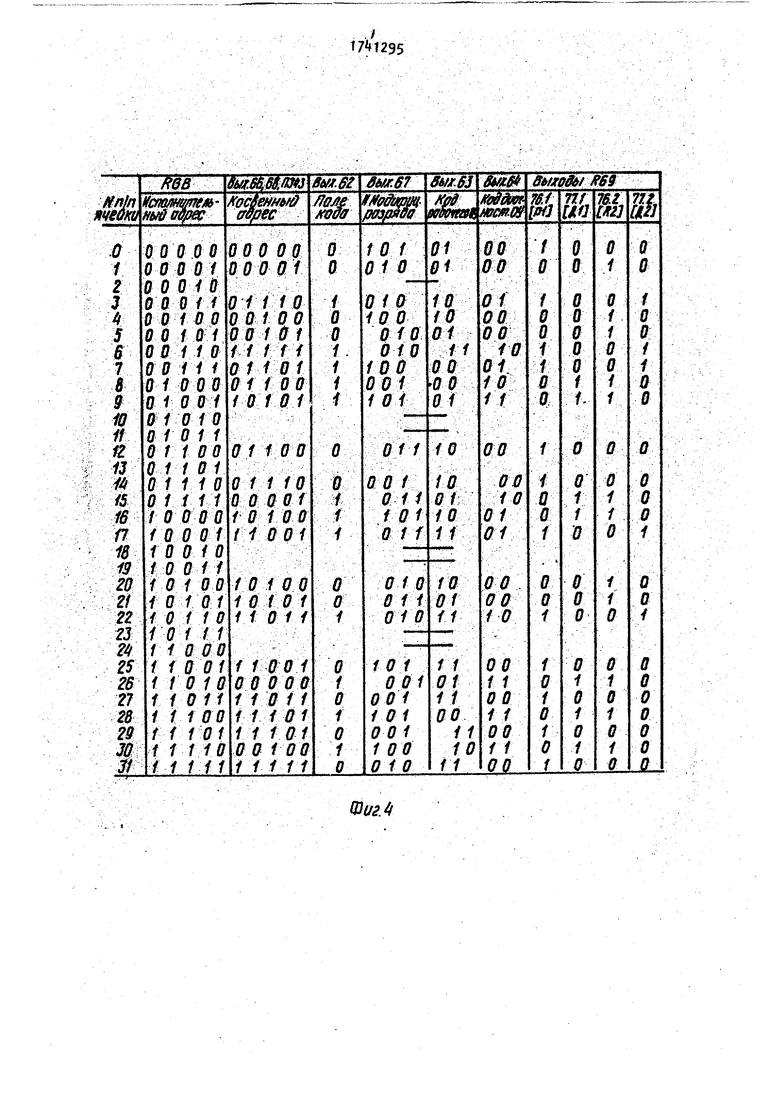
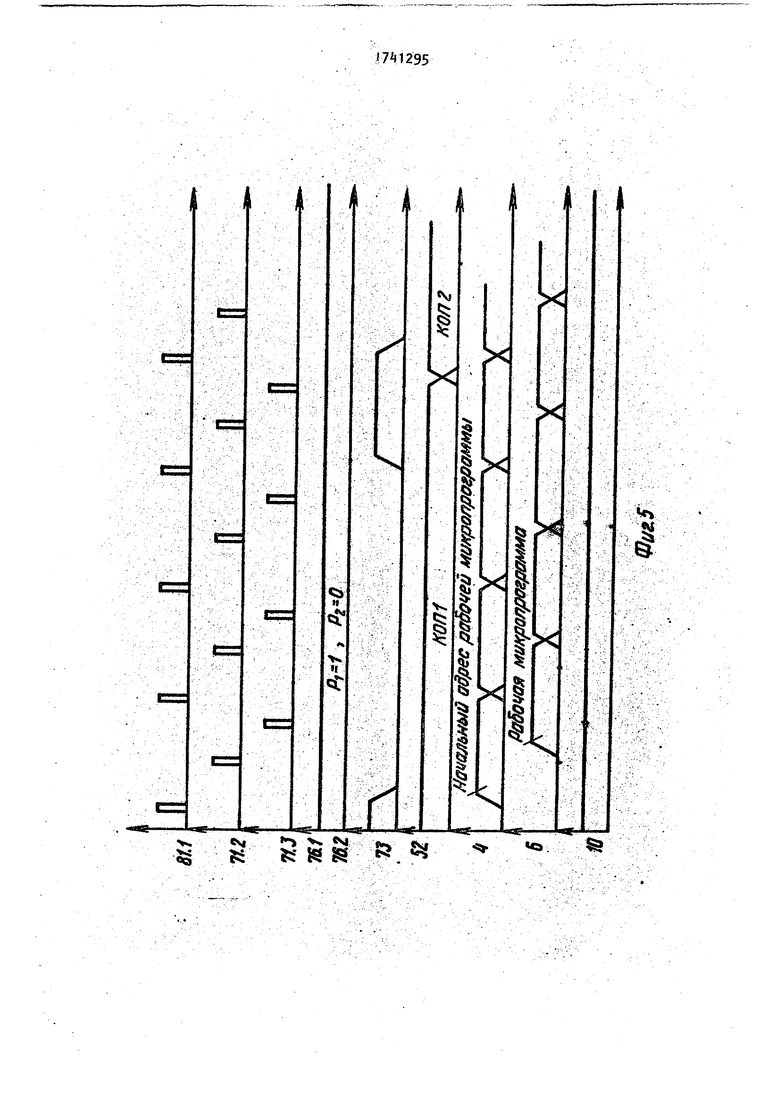
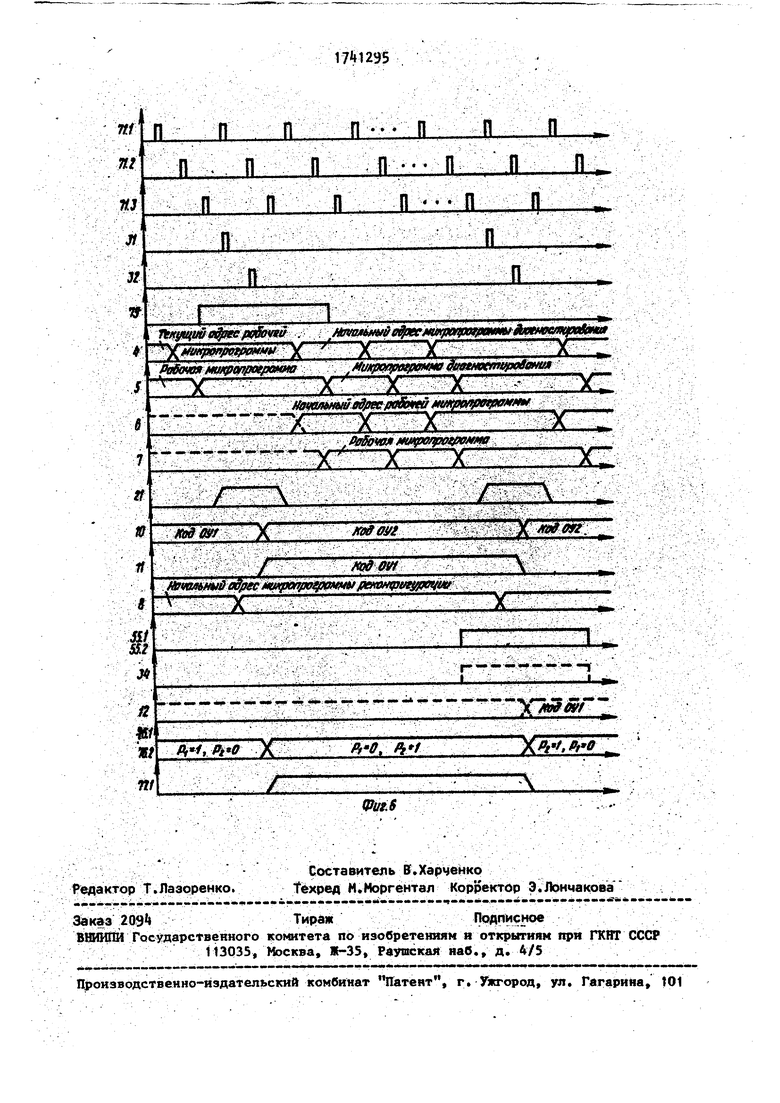
На фиг„1 показана функциональная схема системы; на фиг.2 - функциональная схема мультиплексора} на фиг.З граф микропрограммы реконфигурации системы для трех объектов; на фиг. -таблица прошивки блока задания команд; нафиг 5 - временная диаграмма работы в режиме рабочих микропрограм (при отсутствии отказа); на фиг.б - временная диаграмма работы системы в режиме диагностирования (при отработке сигнала ошибки от одного из объектов).
Система для программного управления резервированными объектами и их диагностирования (фиг.О содержит первый 1 - третий 3 блоки задания команд, первый регистр 4 адреса, первый регистр 5 микроопераций, второй регистр 6 адреса, второй регистр 7 микроопераций, третий регистр 8 адреса, регистр 9 микроопераций, регистр 10 кода работающего объекта, регистр 10 кода работающе
10
15
20
25
й
30
35
40
45
50
55
го объекта, регистр 11 номера диагностируемого объекта, регистр 12 от-1 казов, первый мультиплексор 13 адре са, первый мультиплексор 1 логических условий, второй мультиплек сор 15 адреса, второй мультиплексор 16 логических условий, генератор 17 констант, третий мультиплексор 18 логических условий, дешифратор 19 работающего объекта, дешифратор 20 диагностируемого объекта, триггер 21 формирования, первый 22 - четвертый 25 коммутаторы, элементов И группы 26о 1 - 2б.п, первый 27 - шестой 32 элементы И, первый 33 - пятый 37 элементы ИЛИ, первый 38 - четвертый 41 магистральные элементы, группу 42.1 - объектов управления, первую группу 43 Л - 43.п магистральных элементов, вторую группу 44.1 - 44 „п магистральных элементов, группу 45„1 - 45.п коммутаторов групп 46 „1 - 46.п коммутаторов данных, шину 47 данных, шину 48 управления, шину 49 контроля, шину 50 логических условий, шину 51 логического контроля, вход 52 кода операций системы, выходы 53.1 и 53.2 конца команд блоков задания команд И5 1 и 2, выходы 54.1 и 54,2 конца работы соответственно первого регистра 5 и второго регистра 7 микроопераций, выходы 55-1 и 55.2 конца диагностирования соответственно первого 5 и второго 7 регистров микроопераций, выходы 56.1 и 5б„2 диагностирования первого регистра 5 и второго регистра 7 микроопераций, выходы 57«1 и 57.2 кодов микроопераций блоков 1 и 2 задания команд, выходы 58,1 и 58.2 блоков задания команд 1 и 2, выходы 59/1 и 59.2 модифицируемых разрядов адреса блоков 1 и 2 задания команд, выходы 60,1 и 60.2 старших блоков Т и 2 задания Команд, выход 62 кода логических условий, выход 63 кода работающего объекта, выход 64 кода диагностируемого объекта, выход 65 кода микроопераций блока 3 задания команд, . выход 66 модифицируемых разрядов ад-i реса блока задания, выход 66 модифи- цируемых разрядов апоеса блока 3 задания команд, выход 6 кода номера модифицируемого разряда адреса блока 3 задания команд, выход 68 немодифицируемых разрядов адреса блока 3 группа 69.1 - б9.п выходов дешифратора 19 выбора работающего объекта,
5 1741295
группа 70,1 - 70.n выходов дешифратора 20 выбора диагностируемого объекта, первый - третий 71.3 входы синхронизации системы, выход 72 конца работы системы, выход 73 конца команды системы, выход 74 остановки системы, выход 75 разряда Ненорма шины 50 логических условий, первый 76,1, второй 76.2, третий , четвертый 77.2 выходы регистра 9 микроопераций, группа 78.1 - 78.n выходов группы 45.1 - 45.n коммутаторов, группа 79,1 - 79.n разОператорная вершина содержит информацию о состоянии каждого из трех объектов, которая указана со, ответственно в первом, втором,третьем разрядах этой вершины. Например, запись в операторной вершине IDP говорит о том, что ОУ1 - находится в состоянии отказа и исключен
10 из реконфигурации, ОУ2 - находится в режиме диагностирования, ОУЗ - выполняет рабочие микропрограммы. Запись POU означает, что ОУТ выполняет рабочие микропрограммы, ОУ2
Ридов управления выходов группы 45.1- |$ находится в резерве, ОУЯ - находится
45. п коммутаторов, группа 80.1 - 8Q,n входов-выходов и группа 88.1 - 8l,n входов-выходов группы 46.1 - 46.п коммутаторов данных, группа 61.1 - бКп выходов группы объектов 49,1 - 49.п.
Мультиплексор 18 логических уело-, вий (фиг.2) содержит дешифратор 8-3, группу 84.1 - 84.п сумматоров по мо дулю два, группу 85.1 - 85„п коммутаторов. Первый - №-тый (86.1 - 86.п}входы информационного входа 66 мультиплексора 18 соединены соответственно с первым - N-м информационным входами группы 85.1 - 85.п коммутаторов и группы 84.1 - 84.п сумматоров по модулю два. Адресный вход ,67 мультиплексора 18 соединен с входом дешифратора 83 i-й выход группы 82 - 82.п выходов которого соединен с первым инверсным и вторым управляющим входами группы 85.1 - 85.п коммутаторов 1-го коммутатора. Второй 24 информационный аход мультиплексора 18 соединен с первым
Ч в режиме диагностирования.
Кроме того, на фиг,5 - 6 символами Р1(Р2) и D1(D2) обозначены состояния соответствующих разрядов
20 RG-ib Символ Р1(Р2) соответствует рабочему режиму первого (второго) канала управления, а символ Ы () - режиму диа г нос тироваяия.
Рассмотрим функциональное назна25 чение элементов и связей предлагаемой системы„
Блоки 1 и 2 задания команд предназначены для хранения микропрограмм диагностирования и рабочих микро- программ, реализующихся устройством. На входы блоков 1 и 2 подаются коды адресом микрокоманд с выходов регистров 5 и 7 соответственно.
На выходах 53Л - 53.2 блоков 1 и 2 соответственно формируется сигнал Конец команды На выход 57.1 РЗУ1 и выход 57.2 ПЗУ2 выдается код микроопераций. На выходе 59.1 ПЗУ1 и выходе 59,2 ПЗУ2 формируются сиг30
35
J -«управляющим входами группы 84.1 - « алы дифицируемых разрядов адреса. 84.п сумматоров по модулю два, выхо- На выходах 3.1 и 63.2 соответствен- ды которых соединены с вторыми информационными входами группы 85.1 - 85.n коммутаторов Выходы группы 85.1 85.п коммутаторов соединены с выходом 45 назначен для управления кодов реконфигурации структуры системы. Блок 3
но ПЗУ1 и ПЗУ2 считываются адреса следующих микрокоманд.
Блок 3 задания микрокоманд предмультиплексора 18.
. На фиг.З использованы следующие обозначения. Символ Р соответствует режиму рабочих микропрограмм объекта, D - режиму диагностирования объекта управления (ОУ), У0 сигнал Ненорма, W« - результат диагности-1 рования ОУ(при Wj. « 0(1) - объект по результатам диагностирования в норме (состоянии отказа), 0й - ч. ОУ находится в резерве, 1 - ОУ отказал).
50
55
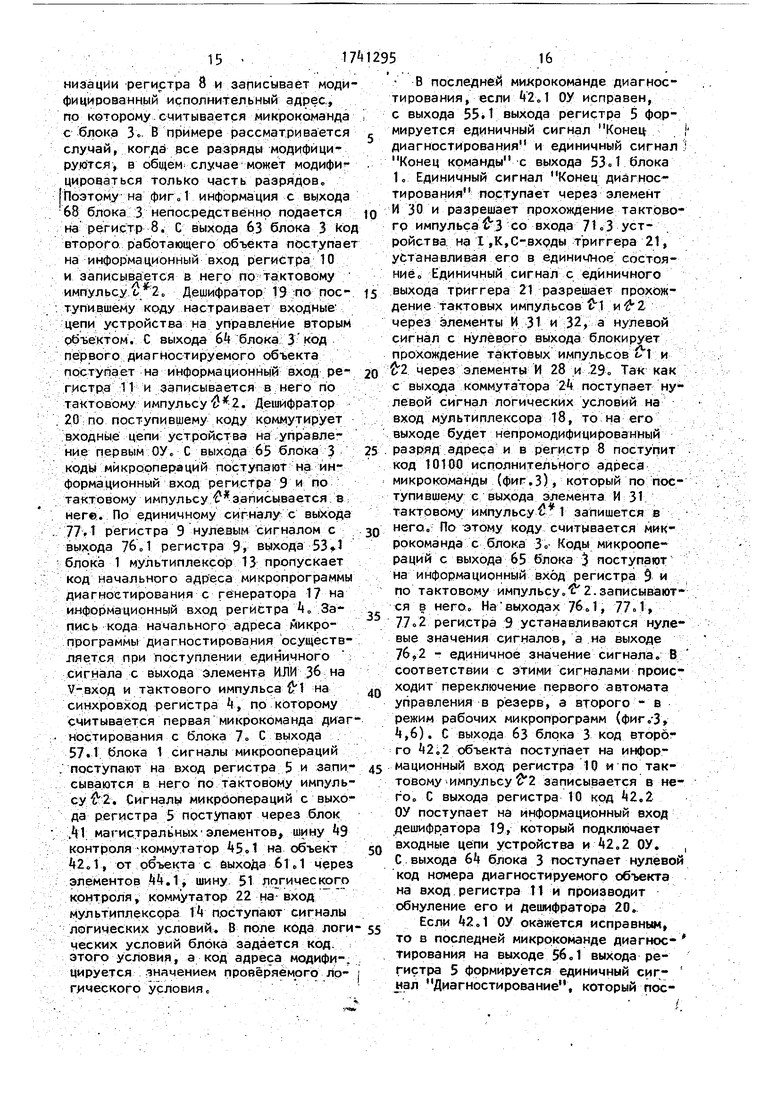
содержит поле кода номера работающего объекта, поле номера диагностируемого объекта, поле кода микроопераций, поле кода косвенного адреса,- поле формирования сигнала Конец команды, поле модифицируемого разряда адреса.
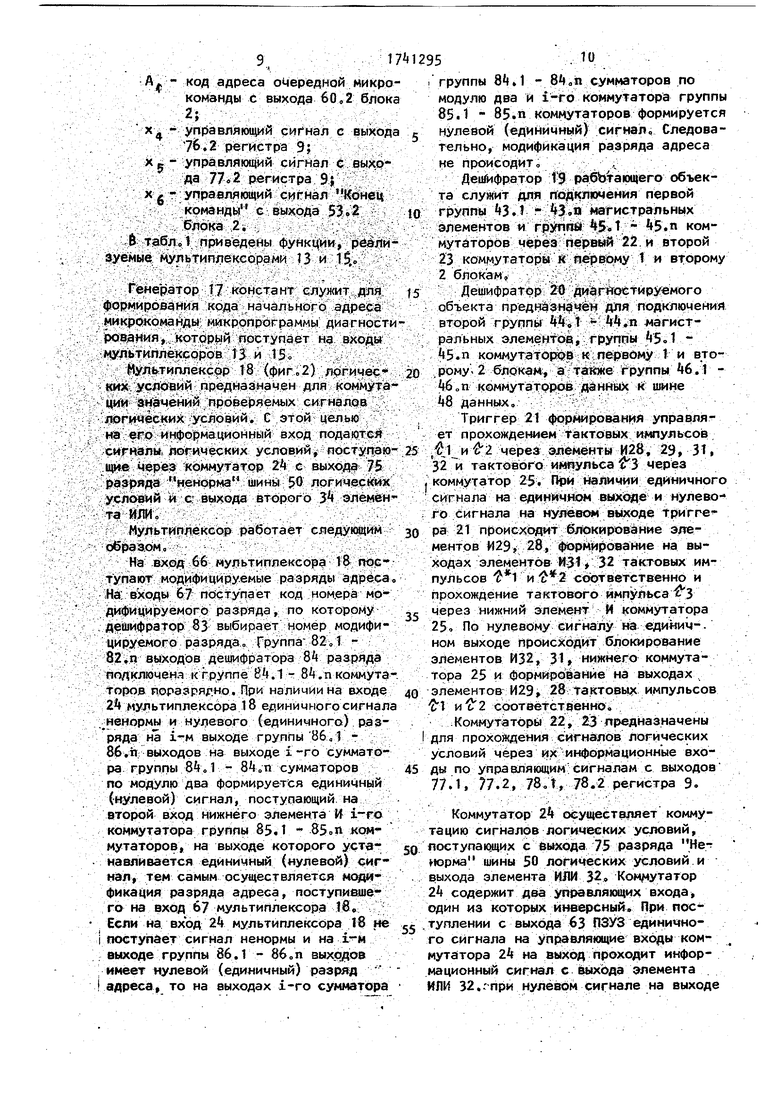
На фиг.З и 4 приведен пример прошивки блока 3 и микропрограмма функционирования для системы с тремя ОУ.
Регистры 4 и 6 адресов служат для приема, временного хранения и,
Операторная вершина содержит информацию о состоянии каждого из трех объектов, которая указана соответственно в первом, втором,третьем разрядах этой вершины. Например, запись в операторной вершине IDP говорит о том, что ОУ1 - находится в состоянии отказа и исключен
из реконфигурации, ОУ2 - находится в режиме диагностирования, ОУЗ - выполняет рабочие микропрограммы. Запись POU означает, что ОУТ выполняет рабочие микропрограммы, ОУ2
находится в резерве, ОУЯ - находится
|$ находится в резерве, ОУЯ - находится
Ч в режиме диагностирования.
Кроме того, на фиг,5 - 6 символами Р1(Р2) и D1(D2) обозначены состояния соответствующих разрядов
0 RG-ib Символ Р1(Р2) соответствует рабочему режиму первого (второго) канала управления, а символ Ы () - режиму диа г нос тироваяия.
Рассмотрим функциональное назна5 чение элементов и связей предлагаемой системы„
Блоки 1 и 2 задания команд предназначены для хранения микропрограмм диагностирования и рабочих микро- программ, реализующихся устройством. На входы блоков 1 и 2 подаются коды адресом микрокоманд с выходов регистров 5 и 7 соответственно.
На выходах 53Л - 53.2 блоков 1 и 2 соответственно формируется сигнал Конец команды На выход 57.1 РЗУ1 и выход 57.2 ПЗУ2 выдается код микроопераций. На выходе 59.1 ПЗУ1 и выходе 59,2 ПЗУ2 формируются сиг0
5
алы дифицируемых разрядов адреса. На выходах 3.1 и 63.2 соответствен-
но ПЗУ1 и ПЗУ2 считываются адреса следующих микрокоманд.
Блок 3 задания микрокоманд пред0
5
содержит поле кода номера работающего объекта, поле номера диагностируемого объекта, поле кода микроопераций, поле кода косвенного адреса,- поле формирования сигнала Конец команды, поле модифицируемого разряда адреса.
На фиг.З и 4 приведен пример прошивки блока 3 и микропрограмма функционирования для системы с тремя ОУ.
Регистры 4 и 6 адресов служат для приема, временного хранения и,
l . 17М295
выдачи кодов адресов микрокоманд со- ответственно на входы блоков 1 и 2.
Регистры 5 и 7 микроопераций предназначены для приема, хранения и вы- 5 дачи кодов микроопераций.
Выход регистра 5, микроопераций содержит выходы: Конец работы , Конец диагностирования 55.1, Диагностирование 56.1 о Выход регистра ю 7 микроопераций содержит выходы: Конец работы , Конец диагностирования , Диагностирование11 56.2« Запись информации в регистры 5 и 7 осуществляется соответственно 15 с выходов и блоков 1 и 2 о
Регистр 8 адреса служит для приема, временного хранения и выдачи кодов адресов микрокоманд на вход блока Зо
Регистр 9 микроопераций предназнз- 20 чен для приема, временного хранения и выдачи сигналов, осуществляющих подключение каналов управления и первого 38 - четвертого П магистральных элементов в режиме рабочих микро- программ, и диагностирования
Регистр 10- кода работающего объекта и регистр 11 кода диагностируемого объекта служат для приема, хранения
и выдачи .соответственного кода номера И) работающего объекта и кода номера диагностируемого объекта на входе дешифраторов 12 и 20 соответственно, информация в эти регистры записывается по заднему- фронту синхроимпульса, J5 поступающему на синхровходы с выхода элемента И 32 Мультиплексоры и 16 предназначены для коммутации зна- .чения проверяемых сигналов логических условий. С этой целью на их информа- 40 ционные входы подаются сигналы логических условий, поступающие через коммутаторы 22 и 23 шины логических условий и логического контроля, первую и вторую группы магистральных 45 элементов с группы 6Ы - 61 «п выходов устройства, а на-адресный вход - коды проверяемых логических условий . с выходов 58.1 т 58.2 соответственно блоков 1 и 2. Мультиплексоры 11 и 16 50 реализуют следующую логическую функцию:
$ , o amj«mpVa4at..-.
...aytiVa«atav.. ;.,... V 3,3 Ц с. . , |
где - а0 a, av.,aw- разряды кодов логичес
) 5 0 5 0
5
8
ких условий, поступающих с выходов 58.1 и 58.2 соответственно блоков 1 и 2;
jump - значение сигнала модифицируемых разрядов адре,- сов, посту-1 пающих с 59.1 и 59,2 соответственноблоков 1 и 2; KJ,XЈ,.«,.,х - значения
логических условий, поступающих
с коммутаторов 22 и 23.
Регистр 12 отказа служит для формирования сигнала отказа, поступающего через элемент И 27 на выход 72 конца работы системы.
Мультиплексоры I и 15 предназначены для коммутации кода операции, начального,адреса микропрограмм диагностирования и очередных кодов адресов микрокоманд блоков 1 и 2 в зависимости от значения управляющих сигналов. Функционирование мультиплексоров 13 и 15 описываются логическими выражениями:
,хгх jA92y x, хгх3А,У х, хгх5А„., где А,4 - выход кода мультиплексора
И;
А5 - код операции на входе 52 кода операций устройства;,
А код адреса очередной микрокоманды с выхода 60.1 блока 1;
А - код начального адреса микрокоманды микропрограммы диагностирования ;
х 5 управляющий сигнал с выхода 76.1 регистра 9;
Х2 управляющий сигнал с выхода 77.1 регистра 9;
х% - управляющий сигнал Конец
команды с выхода 53.1 бло-1 ка 1,
А,у x«/X5- 6A vx xfхвАЛх х ХйАц, (
где А, - выход кода мультиплексора 15;
А - код адреса очередной микрокоманды с выхода 60,2 блока 2;
Х4 управляющий сигнал с выхода с 76.2 регистра 9;
Х5 управляющий сигнал с выхода 77.2 регистра 9$
х , - управляющий сигнал Конец
t..
команды с выхода 53«2 блока 2.
6 таДп.,1 приведены функции, реалиуемые мультиплексорами 13 и 1%.
Генератор 17 констант служит для формирования кода начального адреса микрокоманды микропрограммы диагностирования, который поступает на входы мультиплексоров 15 и 15ч,
Мультиплексор Т8 () логичес- «их условий предназначен для коммутации значений проверяемых сигналов логических условий. С этой цель на его информационный вход подаются
а
с
ш
15
20741295™
группы 84.1 - 84 „п сумматоров по модулю два и 1-го коммутатора группы 85.1 - 85.п коммутаторов формируется нулевой (единичный) сигнал. Следовательно, модификация разряда адреса не происодит.
Дешифратор 19 работающего объекта служит для подключения первой группы 43.1 43.П магистральных элементов и группы 45.1 45.п коммутаторов через первый 22 и второй 23 коммутаторы к первому 1 и второму 2 блокам,
Дешифратор 26 диагностируемого объекта предназначен для подключения второй группы 44,Т - 44.п магистральных элементов,, группы 45.1 - 45.п коммутаторов к первому 1 и второму. 2 блокам, а также группы 46.1 - 46 „п коммутаторов данных к шине 48 данных.
Триггер 21 формирования управляет прохождением тактовых импульсов
| название | год | авторы | номер документа |
|---|---|---|---|
| Микропрограммное устройство управления | 1986 |
|
SU1381506A1 |
| Устройство для управления,контроля и диагностирования | 1985 |
|
SU1297063A1 |
| Микропрограммное устройство для тестового диагностирования и управления | 1984 |
|
SU1242946A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1142833A1 |
| Микропрограммное устройство управления с контролем | 1986 |
|
SU1365082A1 |
| Микропрограммное устройство для тестового диагностирования и управления | 1984 |
|
SU1256024A1 |
| Микропрограммное устройство управления с контролем | 1983 |
|
SU1136162A1 |
| Мультимикропрограммное устройство управления | 1985 |
|
SU1282121A1 |
| Микропрограммное устройство управления с контролем | 1989 |
|
SU1702370A1 |
| Микропрограммное устройство управления | 1988 |
|
SU1621027A1 |
Изобретение относится к автоматике и вычислительной технике и . может быть использовано при разработке аппаратно-программных средств управления и диагностирования отказоустойчивых вычислительных и управляющих-систем, а также сложных технологических объектов в АСУ ТП. Цель изобретения - повышение надежности. Для этого повышают отказоустойчивость системы за счет обеспечения возможности непрерывного управления объектами при наличии отказов в них. Сие Х ь f Тема содержит N объектов, два идентичных канала, осуществляющих диагностирование и управление, и специальный автомат управляющий процессом реконфигурации, т.е. подключением каналов управления к соответствующим объектам, и осуществляющий коммутацию их входов-выходов. Первый и второй каналы управления реализуют режимы рабочих микропрограмм и микропрограмм диагностированияо В режиме рабочих микропрограмм один из каналов управляет работоспособным объектом, а второй при появлении сигнала ошибки выясняет причину поступления сигнала Ненорма11, который может быть вызван отказом объекта или сбоем. При пбступ-| лении сигнала логического уровня Ненорма11 специальный автомат управляющий процессом реконфигурации, осуществляет перекоммутацию резервных . объектов и определяет порядок взаимодействия каналов управления с объектами. Наличие двух каналов управле1 ния и специальных технических средств, управляющих процессом реконфигурации,J обеспечивает возможность непрерывного управления работоспособными объектами I в резервируемой системе. 2 табл., 6 tvoi. § iS о ся
сигналы логических условий, поступаю- 25 Ј1 и Ј2 через элементы И28, 29. 3t,
1 --Wlo
щие через коммутатор 24 с выхода 75 разряда ненорма шины 50 логических условий и с выхода второго 34 элемента ИЛИ.
32 и тактового импульса 3 через ,коммутатор 25. При наличии единичног сигнала на единичном выходе и нулево го сигнала на нулевом выходе триггера 21 происходит блокирование элементов И29, 28, формирование на выходах элементов И31 32 тактовых импульсов 1 соответственно и прохождение тактового импульса ъ 3 через нижний элемент И коммутатора 25. По нулевому сигналу на единичном выходе происходит блокирование элементов И32, 31, нижнего коммутатора 25 и формирование на выходах элементов И29, 28 тактовых импульсов Јl соответственно.
30
35
Мультиплексор работает следующим образом.
На вход 66 мультиплексора 1& пос тупают модифицируемые разряды адреса. На входы 6 поступает код номера модифицируемого разряда, по которому дешифратор 83 выбирает номер модифицируемого разряда. Группа 82,1 - 82.п выходов дешифратора 84 разряда подключена «группе Ј4.1 - 84.п коммутаторов поразрядно. При наличии на входе 24 мультиплексора 18 единичного сигнала
ненормы и нулевого (единичного) разряда i-м выходе группы 86.1 - 86.it выходов на выходе 1-го сумматора группы 84.1 - 84.п сумматоров по модулю два формируется единичный (нулевой) сигнал, поступающий на второй вход нижнего элемента И 1-го коммутатора группы 85,1 85° л коммутаторов, на выходе которого устанавливается единичный (нулевой) сигнал, тем самым осуществляется модификация разряда адреса, поступившего на вход 67 мультиплексора 18« Если на вход 24 мультиплексора 18 не «
поступает сигнал ненормы и на х-м выходе группы 86.1 - 86.п выходов имеет нулевой (единичный) разряд адреса, то на выходах 1-го сумматора
40
45
50
Ј1 и Ј2 через элементы И28, 29. 3t,
--Wlo
32 и тактового импульса 3 через ,коммутатор 25. При наличии единичного сигнала на единичном выходе и нулевого сигнала на нулевом выходе триггера 21 происходит блокирование элементов И29, 28, формирование на выходах элементов И31 32 тактовых импульсов 1 соответственно и прохождение тактового импульса ъ 3 через нижний элемент И коммутатора 25. По нулевому сигналу на единичном выходе происходит блокирование элементов И32, 31, нижнего коммутатора 25 и формирование на выходах элементов И29, 28 тактовых импульсов Јl соответственно.
Коммутаторы 22, 23 предназначены для прохождения сигналов логических условий через их информационные входы по управляющим сигналам с выходов 77.1, 7.2, 78.t, 78.2 регистра 9.
Коммутатор 24 осуществляет коммутацию сигналов логических условий, поступающих с быхода 75 разряда Не- иорма шины 50 логических условий и выхода элемента ИЛИ 32 Коммутатор 24 содержит два управляющих входа, один из которых инверсный. При поступлении с выхода 63 ПЗУЗ единичного сигнала на управляющие входы коммутатора 24 на выход проходит информационный сигнал с выхода элемента ИЛИ 32.:при нулевом сигнале на выходе
63 ПЗУЗ на выход коммутатора 24 про- .ходит сигнал с выхода 75 шины 50,
Коммутатор 25 управляет работой триггера 21„ По единичному сигналу на выходе 25 триггер 21 устанавливается в единичное состояние,по нулевому сигналу происходит его сброс.
Группа элементов И 26«1 и 26.п усЭлемент ИЛИ 37 формирует управляющий сигнал, который поступает на V-входы регистров 6 и 7
Магистральные элементы 38-41 служат для управления прохождением информации с выходов регистров 5 и 7 через шину 48 управления, шину 49 контроля, группу 45.1 - коммутанавливает в единичное состояние от- ю тат°Р°в на группу 78.1 - 78.п выхо20
25
дельные триггеры регистра 12 при поступлении единичных сигналов с выхода элемента ИЛИ 3 и группы 71.1 - 7Un выходов дешифратора 20. Элемент И 27 формирует сигнал отказа, поступающий 15
на выход 73 конца работы системы. i
Элемент И 28 формирует тактовый импульс 1,, который поступает на синх- ровходы регистров 4 и 6 при наличии единичного сигнала с нулевого выхода триггера 21. Элемент И 29 служит для формирования тактового импульса 2, который поступает на синхровходы регистров 5 и 7 при наличии одиночного сигнала с нулевого выхода триггера 21.
Элемент И 3& предназначен для формирования управляющего сигнала, поступающего на первый вход коммутатора 25.30
Элемент И 31 предназначен для формирования тактового импульса t 1, который поступает на синхровход регистра 8 при наличии единичного сигнала с единичного выхода триггера 21.
Элемент И 32 служит для формирования тактового импульса , который поступает на синхровходы регистров 9-11 -при наличии единичного сигнала с единичного выхода триггера 21„
Элемент ИЛИ 33 формирует управляющий сигнал, который поступает на выход 74 останова системы
Элемент ИЛИ 34 служит для формирования управляющего сигнала, который поступает на первый вход коммутатора 2 и входы группы 26,1 - 26,Ti элементов И.50
35
40
дов.
Группа 43 Л - 43,п магистральных элементов управляют прохождением ин- фс рмации между группой 61.1 - 61 „п выходов группы 42„1 - 42,п ОУ и шино 50 логических условий.
Группа 44 „1 - 44.п магистральных элементов предназначена для управления прохождением информации между группой 6Ы - 61 .п выходов группы 42,1 - 42„п ОУ vf ииной 51 логическог контроля.
Группа 45.1 - 45.п коммутаторов служит для коммутации сигналов микроопераций, поступающих через шину 49 управления, шину 50 контроля, пер вый 38 - четвертый 41 магистральные элементы с выходов соответственно регистров 5 и 7.
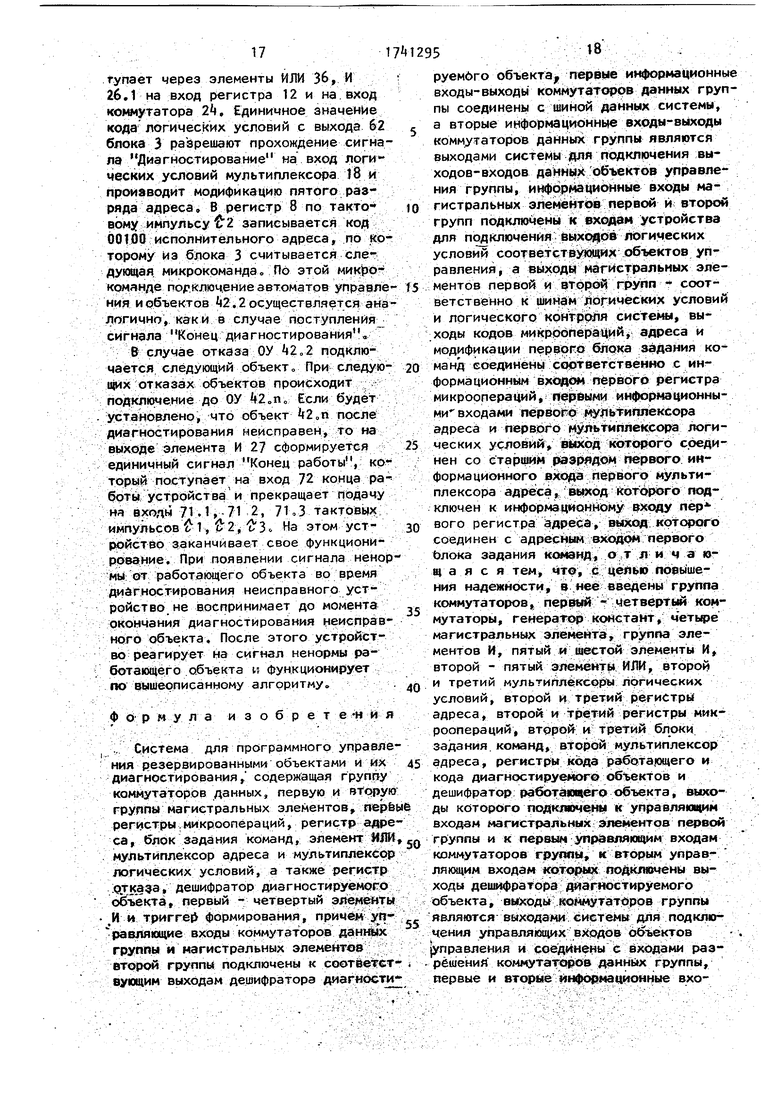
Группа 46.1 - 46„п коммутаторов данных предназначена для управления обменом информацией между группой 42.1 - 42.п ОУ и шиной 48 данных.
Работа коммутатора 46.1 данных опи сывается табл. 2«,
Принцип действия системы состоит в следующем.
Данная система может функционировать с п объектами и содержит два идентичных канала управления, специальные технические средства рекон- 45 фигурации каналов и объектов.
При этом первый канал управляет объектом, второй находится в резерве. В случае поступления сигнала логического управления Ненорма11 от объекта специальные технические средства реконфигурации каналов и -объектов подключают резервный объект Управление этим объектом осуществляет второй канал, а первый - диагностирование объекта, выставившего сигнал Ненорма. Если сигнал Ненорма оказался сбоем или ошибкой, то этот объект включается в реконфигурацию. При поступлении сигнала
Элемент ИЛИ 35 формирует управляющий сигнал, поступающий на выход 73 конца команд устройства.
Элемент ИЛИ 36 служит для формирования управляющего сигнала, который поступает на V-входы регистров 4 и 5.
Элемент ИЛИ 37 формирует управляющий сигнал, который поступает на V-входы регистров 6 и 7
Магистральные элементы 38-41 служат для управления прохождением информации с выходов регистров 5 и 7 через шину 48 управления, шину 49 контроля, группу 45.1 - комму0
5
5
0
5
дов.
Группа 43 Л - 43,п магистральных элементов управляют прохождением ин- фс рмации между группой 61.1 - 61 „п выходов группы 42„1 - 42,п ОУ и шиной1 50 логических условий.
Группа 44 „1 - 44.п магистральных элементов предназначена для управления прохождением информации между группой 6Ы - 61 .п выходов группы 42,1 - 42„п ОУ vf ииной 51 логического контроля.
Группа 45.1 - 45.п коммутаторов служит для коммутации сигналов микроопераций, поступающих через шину 49 управления, шину 50 контроля, первый 38 - четвертый 41 магистральные элементы с выходов соответственно регистров 5 и 7.
Группа 46.1 - 46„п коммутаторов данных предназначена для управления обменом информацией между группой 42.1 - 42.п ОУ и шиной 48 данных.
Работа коммутатора 46.1 данных описывается табл. 2«,
Принцип действия системы состоит в следующем.
Данная система может функционировать с п объектами и содержит два идентичных канала управления, специальные технические средства рекон- фигурации каналов и объектов.
При этом первый канал управляет объектом, второй находится в резерве. В случае поступления сигнала логического управления Ненорма11 от объекта специальные технические средства реконфигурации каналов и -объектов подключают резервный объектJ Управление этим объектом осуществляет второй канал, а первый - диагностирование объекта, выставившего сигнал Ненорма. Если сигнал Ненорма оказался сбоем или ошибкой, то этот объект включается в реконфигурацию. При поступлении сигнала
13
отказа объект из реконфигурации исключается о Устройство прекращает свое функционирование при отказе всех объектов.
Рассмотрим функционирование системы на примере с тремя ОУ (фиг.З - 5).
В исходном состоянии на выходах 53о 1 - 53.2 соответственно блоков 1 и 2 присутствуют единичные,сигналы Конец команды. В регистре 8 записан код нулевого исполнительного адреса, в регистре 10 - код пер- вого объекта, дешифратор 19 настроен на выбор первого объекта. На выходе 76.1 регистра 9 имеется единичное значение сигнала Остальные триггеры находятся в нулевом состоянии Цепи установки в исходное состояние условно не показаныо
Работы системы начинается при поступлении на входы 71.1, 71,.2, 71.3 тактовых импульсов г$2, ф З Под воздействием единичных сигналов с выхода 53 Л блока 1, выхода 76.1 регистра 9 нулевых сигналов с выхода 61.1 выхода 57 о 1 блока 1, выходов регистра 9 мультиплексора 13 пропускает код операции (начальный адрес рабочей микропрограммы) на вход регистра 4. По тактовому импульсу , который проходит через элемент И 28, и единичному значению управляющего сигнала с выхода элемента ИЛИ 36 в регистр Ц заносится код операции (начальный адрес рабочей микропрограммы) . С выхода регистра 4 поступае исполнительный адрес первой микрокоманды на вход блока 1, из которого считывается первая микрокоманда С вывода 57.1 поля микроопераций блока 1 поступают сигналы микроопераций на вход регистра 5 и записывается в него по тактовому испульсуС 2, поступающему через элемент И 29
1
С выхода 82.1 объекта 42.1 управления элемент 43 Л, шину 50 логических условий, коммутатор 22 иа вход мультиплексора 14 логических условий поступают сигналы значений логических условий, С выхода 58.1 блока 1 на вход мультиплексора Ik поступает код логических условий, который осуществляет набор значения логического условия, поступающего с выхода 1 ОУ„ При поступлении единичного сигнала значения логического условия проис
to
20
15
т
7412951/|
ходит модификация младшего разряда адреса, при нулевом сигнале значения логического условия модификация не происходит Код исполнительного адреса очередной микрокоманды происходит через мультиплексор 13 под воздействием нулевых сигналов с выхода 53,1 блока 1, выхода 77«1 регистра 9, единичного сигнала с выхода 76о 1 регистра 9 на вход регистра k и записывается в него по очередному тактовому импульсу 1 о В последующем работа устройства осуществляется аналогичным образом. Последней микрокомандой микропрограммы формируется единичный сигнал Конец команды который поступает через элемент ИЛИ 35 на выход 73 конца команд устройства и разрешает по тактовому импульсу Ј3 поступление следующего кода операций на вход 52 кода операций устройства,
При реализации режима рабочих микропрограмм в случае появления сигнала ошибки с выхода 75 разряда ненормы шины логических условий поступает единичный сигнал, который проходит через коммутатор 24 на вход логических условий мультиплексора 18 и вход элемента И 3 (фиг„6). На выходе элемента 35 формируется сигнал управления, по которому тактовый импульс 3 с входа 71.1. проходит на I ,К,Овходы триггера 21 и устанавливает его в единичное состояние Нулевой сигнал с нулевого выхода триггера 21 блокирует поступление тактовых импульсов и через элементы И 28 и И 29о Единичный сигнал с единичного выхода триггера 2t поступает вместе с тактовыми импульсами ь 1 и 2 на входы элементов И 31 и 32, формируя на их выходах тактовые импульсы 1 и 45 . Этот же единичный сигнал с единичного выхода триггера 21 разрешает прохождение тактового импульса Јз через коммутатор 25 на 1,К,С-входы триггера 21, который устанавливает его в нулевое состояние. Нулевой сиг25
30
35
40
50
55
нал с единичного выхода триггера 21 блокирует дальнейшее поступление тактовых импульсов Ъ ц&2 через элементы И 31 и 32, а единичный сигнал разрешает прохождение тактовых импульсов Ј1 и f2 через элементы И 28 и 29,
С выхода элемента И 31 тактовый импульс поступает на вход синхронизации регистра 8 и записывает модифицированный исполнительный адрес, по которому считывается микрокоманда с блока 3 В примере рассматривается случай, когда все разряды модифицируются, в общем случае может модифицироваться только часть разрядов Поэтому на фиго информация с выхода 68 блока 3 непосредственно подается на регистр 8. С выхода 63 блока 3 код второго работающего объекта поступает на информационный вход регистра 10
В последней микрокоманде диагностирования, если 2о1 ОУ исправен, с выхода 55.1 выхода регистра 5 формируется единичный сигнал Конец- диагностирования и единичный сигнал Конец команды с выхода 53«1 блока 1, Единичный сигнал Конец диагностирования поступает через элемент JQ И 30 и разрешает прохождение тактово
го импульсаЈ 3 со входа 71 «3 устройства на 1,К,С-входы триггера 21, устанавливая его в единичное состояние Единичный сигнал с единичного
Дешифратор 19 по пос- fs выхода триггера 21 разрешает прохождение тактовых импульсов t и 2
и записывается в него по тактовому импульсу
тупившему коду настраивает входные цепи устройства на управление вторым объектом. С выхода (k блока 3 код первого диагностируемого объекта поступает на информационный вход ре- 20 гистра 11 и записывается в него по тактовому импульсу . Дешифратор 20 по поступившему коду коммутирует входные цепи устройства на управление первым ОУ„ С выхода 65 блока 3 коды микроопераций поступают на информационный вход регистра 9 и по тактовому импульсу Ј записывается в неге. По единичному сигналу с выхода 77Л регистра 9 нулевым сигналом с выхода 76 о 1 регистра 9, выхода 53 1 блока 1 мультиплексор 13 пропускает код начального адреса микропрограммы диагностирования с генератора 17 на информационный вход регистра „ Запись кода начального адреса микропрограммы диагностирования осуществляется при поступлении единичного сигнала с выхода элемента ИЛИ 36 на V-вход и тактового импульса {Н на синхровход регистра , по которому считывается первая микрокоманда диагностирования с блока 7о С выхода
через элементы И 31 и 32, а нулевой сигнал с нулевого выхода блокирует прохождение тактовых импульсов и Ј2 через элементы И 28 и 29 Так как с выхода коммутатора 2k поступает нулевой сигнал логических условий на вход мультиплексора 18, то на его выходе будет непромодифицированный 25 разряд адреса и в регистр 8 поступит код 10100 исполнительного адреса микрокоманды (фиг.З), который по поступившему с выхода элемента И 31 тактовому импульсу и 1 запишется в него. По этому коду считывается микрокоманда с блока Зо Коды микроопераций с выхода 65 блока 3 поступают на информационный вход регистра 9 и по тактовому импульсу „ И 2. записывают ся в него. На выходах 76 Л, 77.1, 77«2 регистра 9 устанавливаются нуле вые значения сигналов, а на выходе 76,2 - единичное значение сигнала. В соответствии с этими сигналами происходит переключение первого автомата управления в резерв, а второго - в режим рабочих микропрограмм (фиг. З, t,6). С выхода 63 блока 3 код второго 2о2 объекта поступает на инфор30
35
40
через элементы И 31 и 32, а нулевой сигнал с нулевого выхода блокирует прохождение тактовых импульсов и Ј2 через элементы И 28 и 29 Так как с выхода коммутатора 2k поступает нулевой сигнал логических условий на вход мультиплексора 18, то на его выходе будет непромодифицированный 25 разряд адреса и в регистр 8 поступит код 10100 исполнительного адреса микрокоманды (фиг.З), который по поступившему с выхода элемента И 31 тактовому импульсу и 1 запишется в него. По этому коду считывается микрокоманда с блока Зо Коды микроопераций с выхода 65 блока 3 поступают на информационный вход регистра 9 и по тактовому импульсу „ И 2. записываются в него. На выходах 76 Л, 77.1, 77«2 регистра 9 устанавливаются нулевые значения сигналов, а на выходе 76,2 - единичное значение сигнала. В соответствии с этими сигналами происходит переключение первого автомата управления в резерв, а второго - в режим рабочих микропрограмм (фиг. З, t,6). С выхода 63 блока 3 код второго 2о2 объекта поступает на инфор57.1 блока 1 сигналы микрооперации
поступают на вход регистра 5 и запи-45 мационный вход регистра 10 и по так- сываются в него по тактовому импуль- товому импульсу записывается в несу 2. Сигналы микроопераций с выхо- го„ С выхода регистра 10 код 2.2
да регистра 5 поступают через блок ) магистральных элементов, шину 9 контроля-коммутатор на объект 2„1, от объекта с выхода 61,1 через элементов й.1, шину 51 логического контроля, коммутатор 22 на- вход мультиплексора И поступают сигналы логических условий. В поле кода логи- 55 ческих условий блока задается код. этого условия, а код адреса модифи-. цируется значением проверяемого ло- i гического условия.
ОУ поступает на информационный вход дешифратора 19, который подключает 50 входные цепи устройства и 42„2 ОУ.
С выхода 6Ь блока 3 поступает нулевой код номера диагностируемого объекта на вход регистра 11 и производит обнуление его и дешифратора 20.
Если 2.1 ОУ окажется исправным, то в последней микрокоманде диагнос- тирования на выходе 56.1 выхода регистра 5 формируется единичный сигнал Диагностирование, который посВ последней микрокоманде диагностирования, если 2о1 ОУ исправен, с выхода 55.1 выхода регистра 5 формируется единичный сигнал Конец- |- диагностирования и единичный сигнал Конец команды с выхода 53«1 блока 1, Единичный сигнал Конец диагностирования поступает через элемент И 30 и разрешает прохождение тактового импульсаЈ 3 со входа 71 «3 устройства на 1,К,С-входы триггера 21, устанавливая его в единичное состояние Единичный сигнал с единичного
0
через элементы И 31 и 32, а нулевой сигнал с нулевого выхода блокирует прохождение тактовых импульсов и Ј2 через элементы И 28 и 29 Так как с выхода коммутатора 2k поступает нулевой сигнал логических условий на вход мультиплексора 18, то на его выходе будет непромодифицированный 5 разряд адреса и в регистр 8 поступит код 10100 исполнительного адреса микрокоманды (фиг.З), который по поступившему с выхода элемента И 31 тактовому импульсу и 1 запишется в него. По этому коду считывается микрокоманда с блока Зо Коды микроопераций с выхода 65 блока 3 поступают на информационный вход регистра 9 и по тактовому импульсу „ И 2. записываются в него. На выходах 76 Л, 77.1, 77«2 регистра 9 устанавливаются нулевые значения сигналов, а на выходе 76,2 - единичное значение сигнала. В соответствии с этими сигналами происходит переключение первого автомата управления в резерв, а второго - в режим рабочих микропрограмм (фиг. З, t,6). С выхода 63 блока 3 код второго 2о2 объекта поступает на инфор0
5
0
мационный вход регистра 10 и по так- товому импульсу записывается в него„ С выхода регистра 10 код 2.2
ОУ поступает на информационный вход дешифратора 19, который подключает входные цепи устройства и 42„2 ОУ.
С выхода 6Ь блока 3 поступает нулевой код номера диагностируемого объекта на вход регистра 11 и производит обнуление его и дешифратора 20.
Если 2.1 ОУ окажется исправным, то в последней микрокоманде диагнос- тирования на выходе 56.1 выхода регистра 5 формируется единичный сигнал Диагностирование, который посгупает через элементы ИЛИ 36, И 26.1 на вход регистра 12 и на вход коммутатора 2, Единичное значение кода логических условий с выхода 62 с блока 3 разрешают прохождение сигнала Диагностирование на вход логических условий мультиплексора 18 и производит модификацию пятого разряда адреса. В регистр 8 по такто ю вому импульсу записывается код 00100 исполнительного адреса, по которому из блока 3 считывается следующая микрокоманда о По этой микрокоманде подключение автоматов управле- 15 ния иобъектов k2.2осуществляется аналогично, как и в случае поступления сигнала Конец диагностирования
& случае отказа ОУ kl.2 подключается следующий объект При следую- 20 щих отказах объектов происходит подключение до ОУ 42„п0 Если будет установлено, что объект 2„п после диагностирования неисправен, то на выходе элемента И 27 сформируется 25 единичный сигнал Конед работы, который поступает на вход 72 конца работы устройства и прекращает подачу на входы 71.1, 71 2, 7ЬЗ тактовых импульсов Ј 1, Ј 2, Ј 3 . На этом уст- 30 ройство заканчивает свое функционирование. При появлении сигнала ненормы от работающего объекта во время диагностирования неисправного устройство не воспринимает до момента ,5 окончания диагностирования неисправного объекта. После этого устройство реагирует на сигнал ненормы работающего объекта и функционирует по вышеописанному алгоритму. о
Формула изобрете-ния
Система для программного управления резервированными объектами и их 45 диагностирования, содержащая группу коммутаторов данных, первую и вторую группы магистральных элементов, первые регистры микроопераций, регистр адреса, блок задания команд, элемент ИЛИ, 0 мультиплексор адреса и мультиплексор логических условий, а также регистр отказа, дешифратор диагностируемого объекта, первый - четвертый элементы И и триггер1 формирования, причем yti- равляющие входы коммутаторов данных группы и магистральных элементов второй группы подключены к соответст- , . вующим выходам дешифратора диагностируембго объекта, первые информационн входы-выходы коммутаторов данных групы соединены с шиной данных системы, а вторые информационные входы-выходы коммутаторов данных группы являются выходами системы для подключения выходов-входов данных объектов управления группы, информационные входы магистральных элементов первой и второй групп подключены к входам устройства для подключения выходов логических условий соответствующих объектов управления, а выходы магистральных элементов первой и второй групп - соответственно к шинам логических условий и логического контроля системы, выходы кодов микроопераций, адреса и модификации первого блока задания команд соединены соответственно с информационным входом первого регистра микроопераций, первыми информационными входами первого мультиплексора адреса и первого мультиплексора логических условий, выход которого соединен со старшим разрядом первого информационного входа первого мультиплексора адреса, выход которого подключен к информационному входу пер вого регистра адреса, выход которого соединен с адресным входом первого Ьлока задания команд, отличающаяся тем, что, с цепью повышения надежности, в нее введены группа коммутаторов, первый - четвертый коммутаторы, генератор констант, четыре магистральных элемента, группа элементов И, пятый и шестой элементы И, второй - пятый элементы ИЛИ, второй и третий мультиплексоры логических условий, второй и третий регистры адреса, второй и третий регистры микроопераций, второй и третий блоки задания команд, второй мультиплексор адреса, регистры кода работающего и кода диагностируемого объектов и дешифратор работающего объекта, выходы которого подключены к управляющим входам магистральных элементов первой группы и к первым управляющим входам коммутаторов группы, к вторым управляющим входам которых подключены выходы дешифратора диагностируемого объекта, выходы коммутаторов группы являются выходами системы для подключения управляющих входов объектов (управления и соединены с входами разрешения коммутаторов данных группы, первые и вторые информационные входы первого и второго коммутаторов подключены соответственно к шине логического контроля и шине логических условий системы, первый и второй управляющие входы первого коммутатора объединены с входами четвертого элемента ИЛИ, первым и вторым входами адреса первого мультиплексора адреса и управляющими входами соот- ветственно третьего и четвертого магистральных элементов и подключены к первому и второму разрядам выхода третьего регистра микроопераций, к третьему и четвеотому разрядам выход которого подключены соответственно первый и второй управляющие входы второго коммутатора, первый и второй входы пятого элемента ИЛИ, первый и второй адресные входы второго мупь- типлексора адреса и управляющие входы соответственно первого и второго магистральных элементов выходы первого и третьего магистральных элементов подключены к первым информа- ционным входам коммутаторов группы, к вторым информационным входам которых подключены выходы второго и четвертого магистральных элементов, выходы кодов микроопераций, адреса и модификации второго блока задания команд соединены соответственно с информационным входом второго регистра микроопераций, с первыми информационными входами второго мультиплексора адреса и второго мультиплексора логи ческих условий, выход которого соеднен со старшим разрядом первого информационного входа второго мультиплексора адреса, выход которого подключей к информационному входу втор
го регистра адреса, выход которого соединен с адресным входом второго олока задания команд, выходы первог и второго коммутаторов подключены к вторым информационным входам одноименных мультиплексоров логических условий, адресные входы которых подключены к выходам младших разрядов адреса соответственно первого и второго, блоков задания команд, выходы Конец команды которых подключены к третьим адресным входам соответствующих мультиплексоров адреса и к входам треУьего элемента ИЛИ, выход которого является выходом Конец команды системы, второй и третий формационные входы первого и второ мультиплексоров адреса подключены с
соединен с
ответственно к выходу генератора констант и к входу кода операций системы, выход второго элемента И под- ключей к входам синхронизации первого и второго регистров адреса, выход третьего элемента И соединен с входами синхронизации первого и второго регистров микроопераций, соответствующие разряды выходов которых соединены с первым и вторым входами первого и второго элементов ИЛИ и четвертого элемента И, кроме того, выход первого регистра микроопераций соединен с информационными входами третьего и четвертого магистрапьных элементов, а выход второго реестра микроопераций - с информационными входами первого и второго магистралЬ ных элементов, выход первого элемента ИЛИ является выходом Останов системы, выход второго элемента ИЛИ подключен к первым входам элементов И группы и к первому информационному входу третьего коммутатора, выход которого соединен с первым информационным входом третьего мультиплексора логических условий, вторые входы элементов И группы подключены к соответствующим выходам дешифратора диагностируемого объекта, а выходы элементов И группы подключены к входам установки соответствующих разрядов регистра отказа, выход которого соединен с входами первого момента И, выход которого является выходом Конец работы системы, выход четвертого элемента ИЛИ подключен к стробирующим входам первых регистра адреса и регистра микроопераций, а выход пятого элемента ИЛИ соединен со стробирующими входами вторых регистра адреса и регистра микроопераций, выход Ненорма шины логических условий соединен с вторым информационным входом третьего коммутатора и третьим входом четвертого элемента И, выход которого соединен с первым информационным входом четвертого коммутатора, выход которого соединен со счетным входом триггера формисоединен с
рования, а управляющий вход является первым входом синхронизации системы, прямой выход триггера формирования
первыми входами пятого и шестого элементов И и с вторым информационным входом четвертого коммутатора, инверсный выход триггера формирования соединен с первыми входами второго и третьего элементов И, второй ёход синхронизации системы подключен к вторым входам третьего и шестого элементов И, а третий вход синхронизации системы соединен с вторыми входами второго и пятого элементов И, выход пятого элемента И подключен к входам синхронизации третьего регистра адреса, выход ко- торого подключен к адресному входу третьего блока задания команд, выход шестого элемента И соединен с входами синхронизации третьего регистра микроопераций, регистра кода диагнос тируемого объекта и регистра кода работающего объекта, информационные входы которых подключены к одноимен- ным выходам третьего блока задания
79
НЕ
Таблица2 Выполняемые операции
блокировка обмена информацией между шиной 47,данных и ОУ 42
Передача информации oi ОУ
42 на шину 47 данных
Передача информации с шины
48 данных на ОУ 42
комаИд, первый и второй выходы модификаций которого подключены к адресному и второму информационному входам третьего мультиплексора логических условий, выход которого и выг ход адреса третьего блока задания команд подключены к информационному входу третьего регистра адреса, выхо управления третьего блока задания команд подключен к входу управления третьего коммутатора и-к, четвертому инверсному входу четвертого элемента И, а выходы регистра кода работающего и кода диагностируемого объектов подключены к входам дешифратора работающего и дешифратора диагностируемого объектов соответственно.
ЛЕ
ТПГ
47
W
3
5621Ш
12
&
I
М
$
I
&
и
щ
И:
гЩ;:
Ж
.
Г
ш
У
шяш
ж
уШ
тчг
1
М
Lfif
fjf
J
/Я
b/L
&
Ј8
W
osf
a
Фиг. 4
| Микропрограммное устройство управления | 1983 |
|
SU1142833A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
