Предлагаемый способ относится к способам экстремального регутшрования с непрерывнодискретным поиском.
Известен способ непрерывно-даскретного регулирования, основанный на применении поисковых модулирующих колебаний вида sin wt 1,
Рассмотрим систему экстремального регулирования, реализующую алгоритм известного способа экстремального peгy rиpoвaния. На вход объекта поступает сигпал Xn Qsincjt . Пусть в системе действует помеха ij bt, вызывающая вертикальный дрейф точки экстремума, тогда на выходе объекта регулирования будет сигнал
у Kj(x + а SW tvJt) + fat
где к, (-)
(х) - вид экстремальной характеристики;
X - рабочее смещение входного сигнала,
а - амплитуда поискового сигнала, которая выбрана достаточно малой, чтобы не сказывалась кривизна характеристики.
На входы множительного звена поступают сигсигналы n(x vasin 6.)t)+ bt и а sifi (i.)t. На выходе после интегрирования будет сигнал управления следующего вида:
п V г , , ,. и Ках- Kja dt2
ы
abt . ab cos tuit + -у sin (ut
UJui
За один период О t формируется сигнал управления в видеио - |-,т.е. помеха нарастает
пропорционально воемени, гак же как и 1юлезный сигнал. Если система теряет устойшвость. Можно заметить, что влияние дрейфа на выходной сигнал исчезает при интегрировании сигнала с выхода множительного устройства от /4 до
5/47, что эквивалентно лодаче на вход объекта регулирования и множительного устройства сигнала
flCOSOjt.
Из известных способов зкстремального регулирования наиболее близким по технической сущности является способ, основанный на умножении косинусоидального поискового сигнала на выходной сигнал объекта регулирования 2.
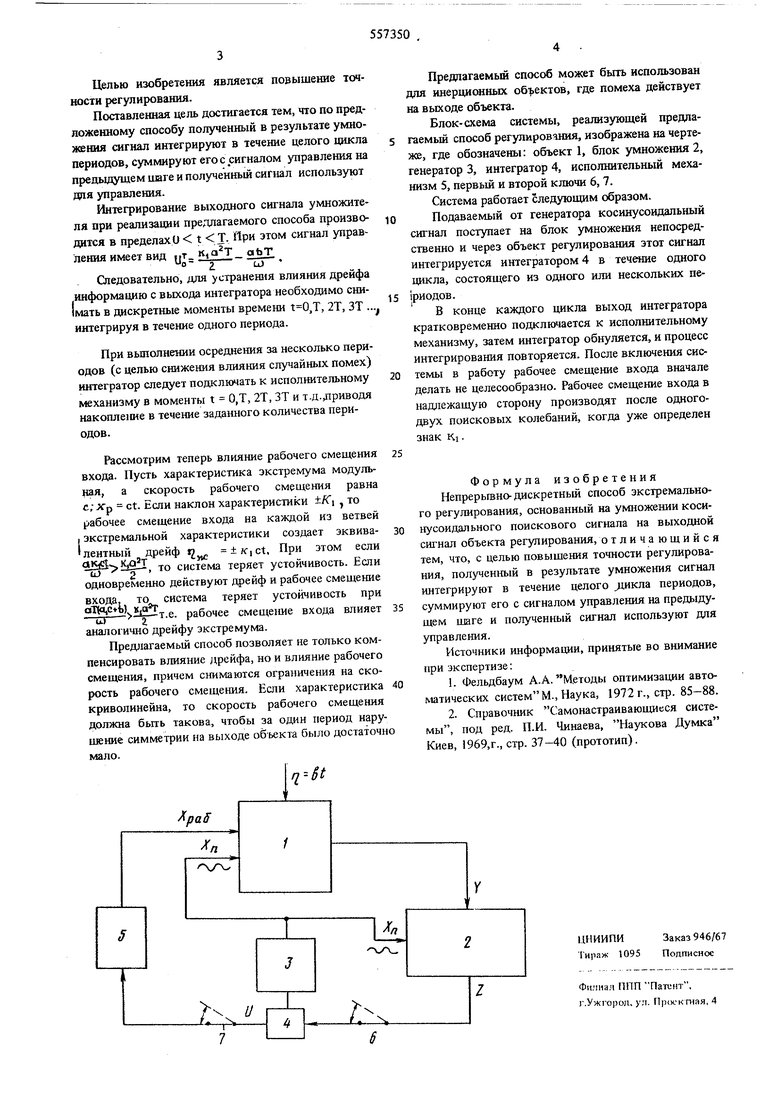
Недостатком известного способа является низкая точность регу;шрования из-за влияния дрейфа точки экс фемума. Целью изобретения является повышение точности регулирования. Поставленная цель достигается тем, что по предложенному способу полученный в результате умножения сигнал интегрируют в течение целого цикла периодов, суммируют его с.сигналом управления на предыдущем шаге и полученный сигнал используют для управления. Интегрирование выходного сигнала умножителя при реализации предлагаемого способа производится в пределахО t Т. Яри этом сигнал управления имеет вид , 2.t-L Следовательно, для устраненля влияния дрейфа информацию с выхода интегратора необходимо сни1мать в дискретные моменты времени ,T, 2Т, ЗТ ... интегрируя в течение одного периода. При вьшолнении осреднения за несколько периодов (с цепью снижения влияния случайных помех) интегратор следует подключать к исполнительному механизму в моменты t ОД, 2Т, ЗТ и т-д.лриводя накопление в течение заданного количества периодов. Рассмотрим теперь влияние рабочего смещения входа. Пусть характеристика экстремума модульная, а скорость рабочего смещения равна с; Хр ct. Если наклон характеристики , то рабочее смещение входа на каждой из ветвей .экстремальной характеристики создает эквива1лентный дрейф 12 ±K,ct, При этом если gj KjOir то система теряет устойчивость. Если одновременно действуют дрейф и рабочее смещение входа, то система теряет устойчивость при .е. рабочее смеще1ше входа влияет аналогично дрейфу экстремума. Предлагаемый способ позволяет не только компенсировать влияние дрейфа, но и влияние рабочего смещения, причем снимаются ограничения на скорость рабочего смещения. Если характеристика криволинейна, то скорость рабочего смещения должна быть такова, чтобы за один период нару шение симметрии на выходе обьекта было достаточн мало. Предаагаемьш способ может быть использован ля инерционных об ектов, где помеха действует а выходе объекта. Блок-схема системы, реализующей предлааемый способ регулирования, изображена на чертее, где обозначены: объект 1, блок умножения 2, енератора, интегратор 4, исполнительный мехаизм 5, первый и второй ключи 6, 7. Система работает следующим образом. Подаваемый от генератора косинусоидальный сигнал поступает на блок умно 1жния непосредственно и через объект регулирования этот сигнал интегрируется интегратором 4 в течетше одного цикла, состоящего из одного или нескольких периодов. в конце каждого цикла выход интегратора кратковременно подключается к исполнительному механизму, затем интегратор обнуляется, и процесс интегрирования повторяется. После включения системы в работу рабочее смещение входа вначале делать не целесообразно. Рабочее смещение входа в надлежащую сторону производят после одногодвух поисковых колебаний, когда уже определен знак KI . Формула изобретения Непрерьтно. дискретный способ экстремального регулирования, основанный на умножении косинусоидального поискового сигнала на выходной сигнал объекта регулирования, отличающийся тем, что, с целью повыщения точности регулирования, полученный в результате умножения сигнал интегрируют в течение целого jwtKHa периодов, суммируют его с сигналом управления на предыдущем щаге и полученный сигнал используют для управления. Источники информации, принятые во внимание при экспертизе: 1.Фельдбаум А.А. Методы оптимизации автоматических систем М., Наука, 1972г., стр. 85-88. 2.Справочник Самонастраивающиеся системы, под ред. П.И. Чинаева, Наукова Думка Киев, 1969,г., стр. 37-40 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Способ экстремального регулирования инерционных объектов с транспортным запаздыванием | 1975 |
|
SU1125601A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Устройство для измерения начальнойАМплиТуды СигНАлОВ СВОбОдНОйядЕРНОй пРЕцЕССии | 1978 |
|
SU805148A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДОВ И КАБЕЛЕЙ | 1999 |
|
RU2170436C2 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Экстремальный регулятор | 1981 |
|
SU974340A1 |
